ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 01.12.2023
Просмотров: 197
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
направление вращения с ротором, будет наводить в роторной обмотке ток частотой
Обратное поле, имеющее направление вращения обратное вращению ротора, будет наводить в его обмотке ток частотой

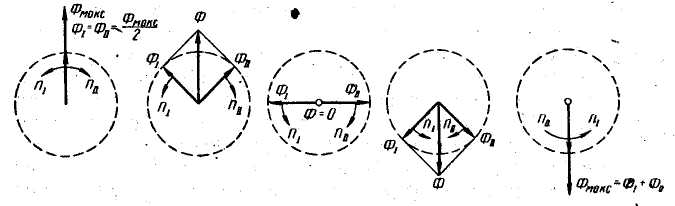
Р-ис. 9.25. Пульсирующее поле и вращающий момент однофазного асинхронного двигателя
Отсюда токи, наведенные обратным полем в обмотке ротора, имеют значительно большую частоту, чем токи, наведенные прямым полем. Так, при f1=50 гц и s=0,05, частоты f2I=2,5 гц, I2II = =97,5 гц.
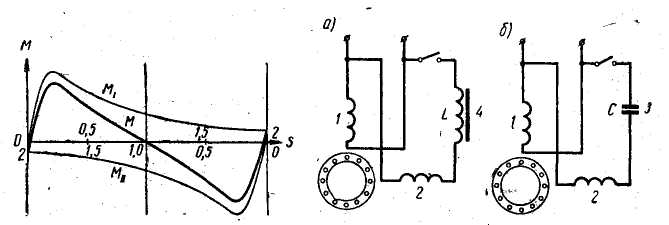
Рис. 9.26. Моменты вращения однофазного двигателя
Рис9.27. Пусковые схемы однофазных двигателей
а) с емкостью в цепи пусковой обмотки
б) с индуктивностью в цепи пусковой обмотки
Индуктивное сопротивление обмотки ротора при такой частоте будет во много раз больше ее активного сопротивления, токи почти чисто реактивными и на обратное поле они будут действовать размагничивающе. Вращающий момент практически весьма мал.
Величина результирующего момента на роторе двигателя выражается суммой ординат MIи MII(рис. 9.26). При малых значениях скольжения s, т. е. при работе двигателя с номинальной нагрузкой, вращающий момент М создается в основном за счет момента M1 . При sI= sII =1 моменты MI = MIIи результирующий момент равен нулю. Двигатель самостоятельно не может начать вращение.
Для пуска однофазных асинхронных двигателей применяют специальные схемы (рис. 9.27). Например, пуск двигателя осуществляется созданием в нем на время пуска вращающегося магнитного поля. -Для этого в пазы статора закладываетcя дополнитель
ная пусковая обмотка, сдвинутая в пространстве относительно рабочей обмотки на 90 эл. град. Чтобы переменные токи в рабочей и дополнительной обмотках были сдвинуты по фазе на 90° и создавали вращающееся магнитное поле, последовательно с пусковой обмоткой включаются активное или индуктивное сопротивления или емкость. Пуск такого двигателя осуществляется непосредственным включением в сеть.
При включении в пусковую обмотку активного или индуктивного сопротивлений (рис. 9.27, а) получить требуемый сдвиг фаз на 90 эл. град, нельзя и пусковой момент двигателя мал. При использовании емкости (рис. 9.27, б) это условие осуществляется, и двигатель развивает значительный начальный пусковой момент.
Однофазные двигатели, работающие с постоянно включенным в их дополнительную обмотку конденсатором, называются конденсаторными двигателями. Если пусковая обмотка с конденсатором используется только в период пуска, то двигатель называется с конденсаторным пуском.
Конденсаторные, двигатели обладают рабочими характеристиками, немного уступающими рабочим характеристикам трехфазных двигателей. Однако их пусковой момент составляет всего 0,2 0,4 МН. Улучшить пусковые свойства двигателя можно при включении двух конденсаторов: пускового, отключаемого после того, как двигатель разовьет скорость 0,7—0,8 nH, и рабочего, включенного постоянно последовательно в рабочую обмотку.
0,4 МН. Улучшить пусковые свойства двигателя можно при включении двух конденсаторов: пускового, отключаемого после того, как двигатель разовьет скорость 0,7—0,8 nH, и рабочего, включенного постоянно последовательно в рабочую обмотку.
Коэффициент мощности конденсаторных двигателей ( ) составляет 0,78 0,93, к. п. д.
) составляет 0,78 0,93, к. п. д.  =0,6—0,75.
=0,6—0,75.
§ 9.16. Асинхронные машины в системе синхронной связи
В схемах автоматического контроля и управления, а также машинных телеграфов и указателей положения пера руля на судах имеют широкое применение однофазные и трехфазные асинхронные машины, называемые сельсинами. Система синхронной связи пред
ставляет собой электрическое соединение двух или нескольких электрических машин, датчиков и приемников, имеющих согласованное вращение или обеспечивающих поворот их роторов на одинаковый угол.
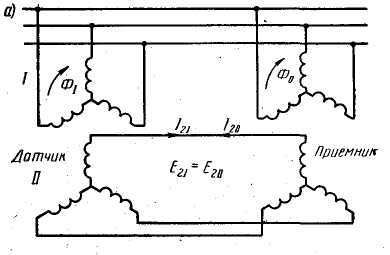
Сельсины могут быть трехфазными или однофазными. На рис. 9.28 показано соединение двух трехфазных сельсинов в системе синхронной связи. Статорные обмотки машин подключены к питающей сети, а роторные — включены навстречу друг другу. При одинаковых пространственных положениях роторов машин вторичные э. д. с. E2Iи E2II, наводимые в обмотках ротора вращающимися магнитными полями, одинаковы по величине, противоположны по фазе и уравновешивают друг друга. Токи в цепи роторов отсутствуют, и ротор неподвижен. При повороте ротора сельсина датчика на некоторый угол в цепи роторов начинает действовать э. д. с.
в цепи роторов начинает действовать э. д. с.  == E2I—Е2II, и возникает уравнительный ток I2. Взаимодействуя с магнитным полем сельсина-приемника, ток I2 создает вращающий момент, и ротор приемника поворачивается на тот же угол, что и ротор сельсина-датчика.
== E2I—Е2II, и возникает уравнительный ток I2. Взаимодействуя с магнитным полем сельсина-приемника, ток I2 создает вращающий момент, и ротор приемника поворачивается на тот же угол, что и ротор сельсина-датчика.
 Примером использования системы синхронной связи может служить указатель положения пера руля (аксиометр). В румпельном помещении судна устанавливается сельсин-датчик, ротор которого механически связывается с баллером руля. В ходовой рубке судна размещается сельсин-приемник. При положении пера руля вдоль-нейтральной плоскости судна система находится в равновесии и. пространственное положе-
Примером использования системы синхронной связи может служить указатель положения пера руля (аксиометр). В румпельном помещении судна устанавливается сельсин-датчик, ротор которого механически связывается с баллером руля. В ходовой рубке судна размещается сельсин-приемник. При положении пера руля вдоль-нейтральной плоскости судна система находится в равновесии и. пространственное положе-
 ние осей роторов одинаково. При перекладке руля на какой-либо угол ротор сельсина-датчика поворачивается на тот же заданный угол. Это вызывает рассогласование системы синхронной связи. Возникающие моменты
ние осей роторов одинаково. При перекладке руля на какой-либо угол ротор сельсина-датчика поворачивается на тот же заданный угол. Это вызывает рассогласование системы синхронной связи. Возникающие моменты
стремятся уничтожить возникшее рассогласование и ротор сельсина-приемника поворачивается на угол рассогласования. Ротор сельсина-приемника связан со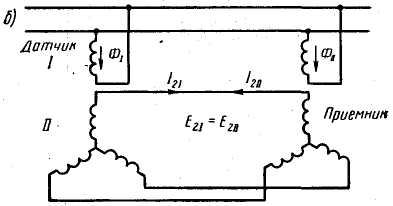 стрелкой, которая на шкале угла поворота пера руля фиксирует, на какой угол произошло смещение пера руля от его нейтрального положения. Таким образом судоводитель в любой момент может видеть, в каком положении находится руль.
стрелкой, которая на шкале угла поворота пера руля фиксирует, на какой угол произошло смещение пера руля от его нейтрального положения. Таким образом судоводитель в любой момент может видеть, в каком положении находится руль.
Однофазные сельсины выполняются с однофазной обмоткой статора и трехфазной обмоткой ротора (рис. 9.28, б). Трехфазные обмотки сельсина-датчика и сельсина-приемника соединяются между собой так же, как и в трехфазной системе. Принцип работы системы тот же, при этом поворот роторов возможен в обе стороны.
Конструктивно устройство сельсинов мало чем отличается от обычных асинхронных двигателей с контактными кольцами. Чаще всего обмотка статора располагается на явно выраженных полюсах благодаря чему достигается наибольший вращающий момент.

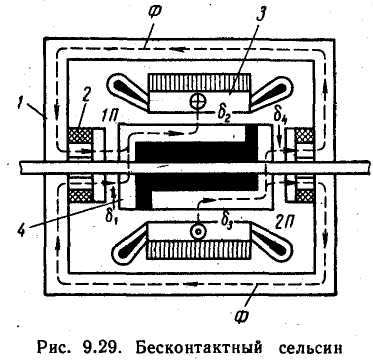
Широкое распространение имеют бесконтактные сельсины, у которых отсутствует скользящий электрический контакт (контактные кольца и щетки). Ротор бесконтактного сельсина не имеет обмотки и представляет собой цилиндр, разделенный по продольной оси на две части, Образующие два магнитных полюса. Полюсы отделены друг от друга немагнитным материалом.
Обе обмотки бесконтактного сельсина: первичная — однофазная обмотка возбуждения и вторичная — трехфазная расположены неподвижно на статоре. Трехфазная обмотка закладывается в пазы внутренней расточки и состоит из двух последовательно соединенных катушек.
Магнитный поток Ф, создаваемый обмоткой возбуждения 2 (рис. 9.29), проходит по внешнему магнитопроводу 1, через воздушный зазор , полюс ротора 1П, воздушный зазор
, полюс ротора 1П, воздушный зазор  в статор 3и воздушный зазор
в статор 3и воздушный зазор 
. полюс ротора 2П и воздушный зазор и возвращается во внешний магнитопровод. Получается замкнутая магнитная цепь.
и возвращается во внешний магнитопровод. Получается замкнутая магнитная цепь.
В контактном сельсине изменение положения вторичной обмотки относительно первичной достигалось поворотом ротора, на котором расположена вторичная обмотка. В бесконтактном сельсине обмотки неподвижны, а первичный магнитный поток поворачивается по отношению к фазным обмоткам статора на угол, определяемый углом поворота ротора. Величины э.д.с, наводимых в фазных обмотках сельсина, зависят от углового положения ротора. Электрическая схема синхронной связи с бесконтактными сельсинами аналогична схемам синхронной связи с контактными сельсинами.
Основное преимущество бесконтактных сельсинов — отсутствие скользящих электрических контактов. Недостатками являются: наличие четырех воздушных зазоров; более тяжелый ротор, что вызывает больший износ подшипников; больший момент инерции ротора, увеличивающий динамические ошибки сельсина.
Обратное поле, имеющее направление вращения обратное вращению ротора, будет наводить в его обмотке ток частотой
Р-ис. 9.25. Пульсирующее поле и вращающий момент однофазного асинхронного двигателя
Отсюда токи, наведенные обратным полем в обмотке ротора, имеют значительно большую частоту, чем токи, наведенные прямым полем. Так, при f1=50 гц и s=0,05, частоты f2I=2,5 гц, I2II = =97,5 гц.
Рис. 9.26. Моменты вращения однофазного двигателя
Рис9.27. Пусковые схемы однофазных двигателей
а) с емкостью в цепи пусковой обмотки
б) с индуктивностью в цепи пусковой обмотки
Индуктивное сопротивление обмотки ротора при такой частоте будет во много раз больше ее активного сопротивления, токи почти чисто реактивными и на обратное поле они будут действовать размагничивающе. Вращающий момент практически весьма мал.
Величина результирующего момента на роторе двигателя выражается суммой ординат MIи MII(рис. 9.26). При малых значениях скольжения s, т. е. при работе двигателя с номинальной нагрузкой, вращающий момент М создается в основном за счет момента M1 . При sI= sII =1 моменты MI = MIIи результирующий момент равен нулю. Двигатель самостоятельно не может начать вращение.
Для пуска однофазных асинхронных двигателей применяют специальные схемы (рис. 9.27). Например, пуск двигателя осуществляется созданием в нем на время пуска вращающегося магнитного поля. -Для этого в пазы статора закладываетcя дополнитель
ная пусковая обмотка, сдвинутая в пространстве относительно рабочей обмотки на 90 эл. град. Чтобы переменные токи в рабочей и дополнительной обмотках были сдвинуты по фазе на 90° и создавали вращающееся магнитное поле, последовательно с пусковой обмоткой включаются активное или индуктивное сопротивления или емкость. Пуск такого двигателя осуществляется непосредственным включением в сеть.
При включении в пусковую обмотку активного или индуктивного сопротивлений (рис. 9.27, а) получить требуемый сдвиг фаз на 90 эл. град, нельзя и пусковой момент двигателя мал. При использовании емкости (рис. 9.27, б) это условие осуществляется, и двигатель развивает значительный начальный пусковой момент.
Однофазные двигатели, работающие с постоянно включенным в их дополнительную обмотку конденсатором, называются конденсаторными двигателями. Если пусковая обмотка с конденсатором используется только в период пуска, то двигатель называется с конденсаторным пуском.
Конденсаторные, двигатели обладают рабочими характеристиками, немного уступающими рабочим характеристикам трехфазных двигателей. Однако их пусковой момент составляет всего 0,2
Коэффициент мощности конденсаторных двигателей (
§ 9.16. Асинхронные машины в системе синхронной связи
В схемах автоматического контроля и управления, а также машинных телеграфов и указателей положения пера руля на судах имеют широкое применение однофазные и трехфазные асинхронные машины, называемые сельсинами. Система синхронной связи пред
ставляет собой электрическое соединение двух или нескольких электрических машин, датчиков и приемников, имеющих согласованное вращение или обеспечивающих поворот их роторов на одинаковый угол.
Сельсины могут быть трехфазными или однофазными. На рис. 9.28 показано соединение двух трехфазных сельсинов в системе синхронной связи. Статорные обмотки машин подключены к питающей сети, а роторные — включены навстречу друг другу. При одинаковых пространственных положениях роторов машин вторичные э. д. с. E2Iи E2II, наводимые в обмотках ротора вращающимися магнитными полями, одинаковы по величине, противоположны по фазе и уравновешивают друг друга. Токи в цепи роторов отсутствуют, и ротор неподвижен. При повороте ротора сельсина датчика на некоторый угол
Примером использования системы синхронной связи может служить указатель положения пера руля (аксиометр). В румпельном помещении судна устанавливается сельсин-датчик, ротор которого механически связывается с баллером руля. В ходовой рубке судна размещается сельсин-приемник. При положении пера руля вдоль-нейтральной плоскости судна система находится в равновесии и. пространственное положе- ние осей роторов одинаково. При перекладке руля на какой-либо угол ротор сельсина-датчика поворачивается на тот же заданный угол. Это вызывает рассогласование системы синхронной связи. Возникающие моменты
стремятся уничтожить возникшее рассогласование и ротор сельсина-приемника поворачивается на угол рассогласования. Ротор сельсина-приемника связан со
стрелкой, которая на шкале угла поворота пера руля фиксирует, на какой угол произошло смещение пера руля от его нейтрального положения. Таким образом судоводитель в любой момент может видеть, в каком положении находится руль.Однофазные сельсины выполняются с однофазной обмоткой статора и трехфазной обмоткой ротора (рис. 9.28, б). Трехфазные обмотки сельсина-датчика и сельсина-приемника соединяются между собой так же, как и в трехфазной системе. Принцип работы системы тот же, при этом поворот роторов возможен в обе стороны.
Конструктивно устройство сельсинов мало чем отличается от обычных асинхронных двигателей с контактными кольцами. Чаще всего обмотка статора располагается на явно выраженных полюсах благодаря чему достигается наибольший вращающий момент.
Широкое распространение имеют бесконтактные сельсины, у которых отсутствует скользящий электрический контакт (контактные кольца и щетки). Ротор бесконтактного сельсина не имеет обмотки и представляет собой цилиндр, разделенный по продольной оси на две части, Образующие два магнитных полюса. Полюсы отделены друг от друга немагнитным материалом.
Обе обмотки бесконтактного сельсина: первичная — однофазная обмотка возбуждения и вторичная — трехфазная расположены неподвижно на статоре. Трехфазная обмотка закладывается в пазы внутренней расточки и состоит из двух последовательно соединенных катушек.
Магнитный поток Ф, создаваемый обмоткой возбуждения 2 (рис. 9.29), проходит по внешнему магнитопроводу 1, через воздушный зазор
. полюс ротора 2П и воздушный зазор
В контактном сельсине изменение положения вторичной обмотки относительно первичной достигалось поворотом ротора, на котором расположена вторичная обмотка. В бесконтактном сельсине обмотки неподвижны, а первичный магнитный поток поворачивается по отношению к фазным обмоткам статора на угол, определяемый углом поворота ротора. Величины э.д.с, наводимых в фазных обмотках сельсина, зависят от углового положения ротора. Электрическая схема синхронной связи с бесконтактными сельсинами аналогична схемам синхронной связи с контактными сельсинами.
Основное преимущество бесконтактных сельсинов — отсутствие скользящих электрических контактов. Недостатками являются: наличие четырех воздушных зазоров; более тяжелый ротор, что вызывает больший износ подшипников; больший момент инерции ротора, увеличивающий динамические ошибки сельсина.