Файл: 1. 1 Технология расформирования составов на сортировочных станциях.docx
Добавлен: 04.12.2023
Просмотров: 717
Скачиваний: 3
СОДЕРЖАНИЕ
1.1 Технология расформирования составов на сортировочных станциях
1.2 Предпосылки автоматизации производственного процесса на сортировочных горках
1.3 Расчет перерабатывающей способности сортировочной горки
2.1 Комплексная система автоматизированного управления сортировочным процессом
2.3 Электропитание устройств ГАЦ
3.1 Характеристика технико-эксплуатационных преимуществ проекта
3.3.2 Экономия эксплуатационных расходов, связанная с сокращением вагоночасов
3.3.3 Экономия расходов, связанных с оплатой труда эксплуатационного персонала
3.3.4 Экономия расхода топлива на выполнение маневровой работы
4 Искусственное освещение рабочего места ДСПГ
4.2 Методика расчета искусственного освещения. Характеристика ламп накаливания
4.3 Расчет искусственного освещения рабочего места дежурного по горке
-
непрерывность контроля обнаруживаемого отцепа в стрелочной зоне; -
независимость характеристик обнаружения от скорости движения отцепа; -
надежность и всепогодность; -
возможность дистанционного контроля работоспособности.
Отказ любого датчика в составе КЗС приводит исполнительное устройство в защитное состояние. При этом устройства КЗС должны обеспечивать вероятность ложной свободности не хуже 10-6-10-7, а вероятность ложной занятости не хуже 10-4-10-5.
2.2.3 Индуктивно-проводной датчик
Индуктивно-проводной датчик, используемый на сети железных дорог России, относится к категории технических средств защиты стрелок горочной автоматической централизации от несанкционированного перевода под вагонами. Он равным образом может использоваться в системах контроля заполнения путей как датчик обнаружения отцепов на сортировочных путях.
Наиболее существенными современными требованиями, предъявляемыми к датчикам обнаружения подвижного состава в системах автоматизации сортировочных горок, являются:
-
обнаружение любых типов грузовых вагонов, эксплуатируемых на сети железных дорог как неподвижных, так и движущихся в диапазоне скоростей от нуля до 40 км/ч в пределах контролируемого участка; -
обеспечение непрерывного тестирования и диагностики работоспособности с прогнозированием предотказных состояний;
-
минимизация ошибок обнаружения и непрерывный физический контроль перемещения всех типов грузовых вагонов.
При этом зона обнаружения, отсчитываемая по положению первой и последней оси отцепа, должна быть не меньше нормативной длины контролируемого участка, например, стрелочного.
Датчик ИПД обнаруживает подвижной состав в зоне укладки индуктивного шлейфа (ИШ) вне зависимости от климатических и других эксплуатационных условий. Для защиты стрелок ГАЦ используются ИШ, уложенные в форме «прямоугольника» или «восьмерки». Их размеры выбираются в зависимости от размеров стрелочного участка. Границы укладывания индуктивных шлейфов жестко привязаны к границам контролируемого участка, что обеспечивает сопряжение длины зоны обнаружения датчика и нормативной длины контролируемого стрелочного участка.
Контроль наличия подвижного состава с помощью ИПД основан на оценке изменения частоты настройки автогенератора гармонических колебаний. Индуктивный шлейф является чувствительным элементом датчика, выполняющим роль колебательного контура автогенератора и изменяющим параметры при наличии подвижного состава в зоне укладки шлейфа.
Любой из датчиков обнаружения подвижного состава, эксплуатируемых на сети железных дорог России, а именно на стрелочных участках, характеризуется инерционностью. Инерционность при появлении в зоне контроля объекта определяется временем анализа, необходимым для фиксации факта обнаружения, временем принятия решения по результатам анализа и исполнения команды исполнительным элементом. С целью исключения риска перевода стрелки под движущимися вагонами важно определить эту инерционность и согласовать длины зон обнаружения датчика и контролируемого участка.
Для ИПД эти длины согласуются с помощью смещения границ укладки индуктивного шлейфа относительно острия остряков стрелки. Анализ эксплуатации ИПД свидетельствует, что с момента входа первой колесной пары отцепа на границу укладки шлейфа его обнаружение происходит с запаздыванием по времени. Поскольку скорости движения отцепов на сортировочных горках могут изменяться в большом диапазоне, момент фиксации (обнаружения) занятости стрелочного участка может находиться дальше границы защитного участка нормативной зоны контроля горочной стрелки. В результате стрелка может перевестись под вагоном. Чтобы это исключить, необходимо выбрать границы укладки шлейфа относительно границ стрелочного участка с учетом параметров, определяющих инерционные свойства ИПД.
В состав ИПД входит аппаратура, располагающаяся в зависимости от функционального назначения в релейном помещении или на поле. В релейном помещении находятся предохранители в цепях питания датчика и реле типа НМШ2-4000, воспринимающие сигналы от электронного блока (ЭБ). БЭ устанавливается в трансформаторном ящике ТЯ ИПД, который, в свою очередь, ставят в границах предстрелочного участка. Место расположения ТЯ ИПД выбирается по местным условиям в начале, середине или конце участка и ближе к трассе кабеля. Исполнительное реле ИП, воспринимающее сигналы от БЭ, и предохранители цепей питания ИПД находятся на посту ГАЦ (рисунок 2.6)[8].
Рисунок 2.6 – Включение ИПД в схему управления стрелкой ГАЦ
Роль чувствительного элемента датчика выполняет индуктивный шлейф, уложенный в пределах рельсовой колеи и изменяющий свои параметры при наезде отцепа. Он располагается внутри железнодорожной колеи в пределах контролируемого участка и крепится к шейке рельсов, изготавливается на месте установки и содержит катушку индуктивности, образованную из 7 жил кабеля КВВГ 7x1.5. Концы кабеля заводятся в путевой ящик, где жилы кабеля распределяются на клеммной колодке в катушку индуктивности. Шлейф крепится к подошве рельсов при помощи крепежных скоб (рисунок 2.7).
Для защиты от механических повреждений кабель помещен в резинотканевый рукав. На сортировочных станциях используют разную длину индуктивных шлейфов исходя из конкретной решаемой задачи. В системе защиты стрелок применяют шлейфы, размеры которых зависят от конкретных размеров предстрелочного участка и не превышают 6 м. В системе КЗП длины шлейфов выбирают с учётом геометрических размеров подвижных единиц, и они равны 22 м. При этом частота генератора в устройствах защиты стрелок равна 45 или 60 кГц, в КЗП – 30 или 40 кГц.
Индуктивный шлейф должен крепиться к шейке рельсов в каждом шпальном ящике, в местах установки накладок шлейф должен крепиться скобами к каждой шпале.
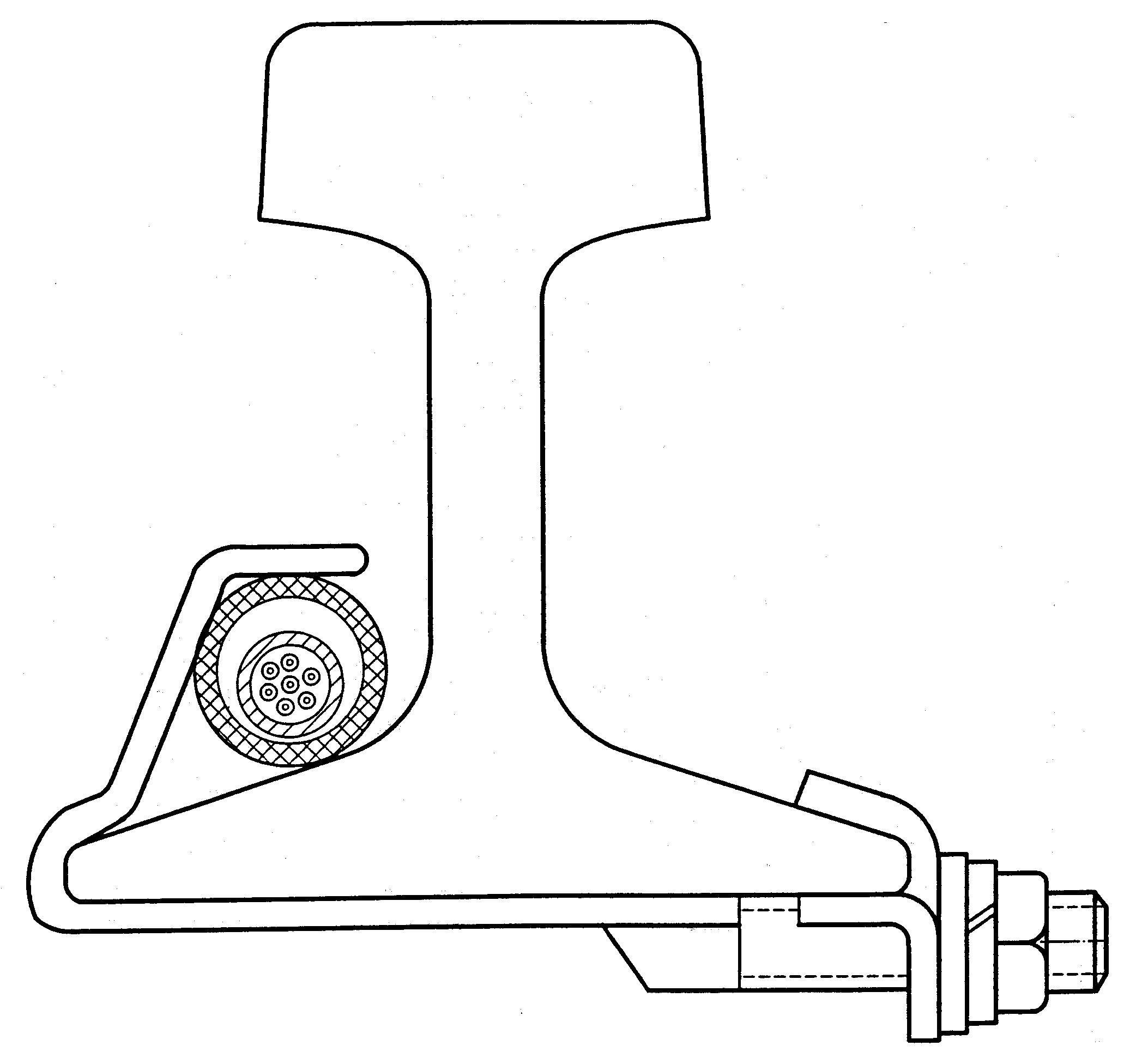
Рисунок 2.7 – Крепление шлейфа ИПД
ИПД обеспечивает контроль свободности или занятости участков пути в пределах уложенного шлейфа от подвижного состава с металлической ходовой частью.
Принцип контроля подвижного состава основан на изменении частоты и амплитуды генератора гармонических колебаний датчика под действием металлической массы вагона. На рисунке 2.8 изображен принцип регистрации занятия участка контроля.
Рисунок 2.8 – Принцип регистрации занятия участка контроля
При свободности этого участка генератор гармонических колебаний выдает на вход порогового устройства сигнальную частоту (синусоидальной формы установленной частоты и амплитуды). Далее пороговое устройство формирует сигнал управления выходным каскадом генератора и на выход БЭ в нагрузку поступает сигнал постоянного тока напряжением примерно 24 В на нагрузке 1440 Ом. При занятости контролируемого участка возможно уменьшение добротности колебательного контура датчика и амплитуды сигнала генератора или полное прекращение колебаний. В любом случае формируется сигнал управления выходным каскадом. В результате сигнал на нагрузке пропадает, это и фиксируется исполнительным элементом.
 Блок электроники состоит из генератора гармонических колебаний, порогового устройства, контрольной схемы, схемы автоподстройки, выходного каскада. Схема автоподстройки необходима для стабилизации работы генератора гармонических колебаний. На рисунке 2.9 изображена функциональная схема блока электроники ИПД.
Блок электроники состоит из генератора гармонических колебаний, порогового устройства, контрольной схемы, схемы автоподстройки, выходного каскада. Схема автоподстройки необходима для стабилизации работы генератора гармонических колебаний. На рисунке 2.9 изображена функциональная схема блока электроники ИПД.
Рисунок 2.9 – Функциональная схема блока электроники ИПД
В реальных условиях на рамку ИШ действует не только металлическая масса вагона, но и климатические факторы (в частности, влажность). В результате амплитуда колебаний генератора датчика может изменяться, в то время как порог срабатывания датчика остается постоянным. Это может привести либо к «пропуску» базы вагона, либо к выдаче ложного сигнала занятости. Поэтому в преобразователе датчика реализована схема стабилизации амплитуды колебаний генератора датчика. Эту функцию выполняет схема автоподстройки. Принцип ее действия основан на том, что в цепь отрицательной обратной связи (ООС) генератора введено регулирующее звено, которое изменяет глубину ООС в зависимости от изменения амплитуды колебаний в ИШ генератора датчика. Регулирующее звено состоит из цифроаналогового преобразователя (ЦАП), работающего в следящем режиме.
Выходной сигнал Uс генератора гармонических колебаний поступает на вход ЦАП и вход компаратора К3. На другой вход К3 подается опорное напряжение Uоп3, которое и определяет величину выходного сигнала на выходе генератора. Если сигнал Uс на входе К3 выше опорного, то на его выходе формируется сигнал, дающий команду на вычитание числа в реверсивном счетчике. При этом сигнал с выхода ЦАП увеличит уровень ООС генератора и сигнал Uс на его выходе уменьшится. Уменьшение сигнала будет происходить до тех пор, пока он не станет меньше Uоп3. После этого на выходе компаратора формируется сигнал, дающий команду на сложение числа в реверсивном счетчике. В этом случае сигнал с выхода ЦАП уменьшает величину ООС генератора и сигнал на его выходе увеличивается.
Напряжение на входе компаратора К3 возрастает на величину
 , где n – число разрядов ЦАП, и компаратор вновь даст команду на вычитание. С каждым следующим тактом компаратор будет выдавать команду либо на сложение, либо на вычитание, а величина выходного сигнала – синхронно изменяться.
, где n – число разрядов ЦАП, и компаратор вновь даст команду на вычитание. С каждым следующим тактом компаратор будет выдавать команду либо на сложение, либо на вычитание, а величина выходного сигнала – синхронно изменяться.Для контроля работоспособности ИПД электронный блок имеет контрольную схему, которая выдает сигнал об исправности, если величина сигнала в контрольной точке КТ, определяющая работоспособность ИПД, не превышает заданной величины. В противоположном случае контрольная схема блокирует выходной каскад, и напряжение на исполнительное реле ИП не поступает.
Для обеспечения условия безопасности работы ИПД контрольная схема ЭБ работает в импульсном режиме. Электронный блок выдает напряжение постоянного тока +24 В, которое питает исполнительное реле. Контроль работоспособности ИПД осуществляется визуально светодиодом «Выход».
Конструктивно-электронный блок представляет собой объемную конструкцию, внутри которой расположены две съемные печатные платы. На одной плате (модуль ЭМ1) — источник питания, генератор синусоидальных колебаний и генератор импульсов, а на второй (модуль ЭМ2) — элементы схемы автоподстройки контрольной схемы (схема выходного каскада). На верхних панелях помещены элементы настройки и индикации, вывод контрольной точки.
При выключении питания ИПД переходит в режим «Занятость» независимо от состояния контролируемого участка. Если питание прерывается на время не более 2 минут, то ИПД восстанавливает свою работоспособность. Если питание прерывается на время более 2 минут, то ИПД переходит в режим «Занятость». Для приведения ИПД в работоспособное состояние необходимо настроить ИПД в соответствие с требованием руководства по эксплуатации.
Инерционность ИПД с момента обнаружения отцепа при входе в зону укладки шлейфа до момента размыкания контактов исполнительного реле определяется следующими факторами:
-
временем анализа, необходимым датчику для регистрации факта обнаружения вагона по реализуемому частотному критерию - 62,5 мс; -
временем, необходимым для формирования выходным каскадом сигнала управления реле - 20 мс и размыкания контактов исполнительного реле НМШ2-4000 - 38 мс.
Таким образом, суммарное время инерционности ИПД при регистрации занятости участка и использовании реле этого типа составляет 120,5мс.
При выходе последней колесной пары отцепа из зоны действия датчика также регистрируется факт освобождения участка с инерционностью. В этом случае инерционность ИПД определяется следующими факторами:
-
временем анализа, необходимым датчику для регистрации факта завершения обнаружения по реализуемому частотному критерию - 187,25 мс; -
временем, необходимым для формирования выходным каскадом сигнала управления реле - 20 мс и временем замыкания контактов при срабатывании исполнительного реле НМШ2-4000 -139 мс.
Суммарное время инерционности ИПД при регистрации свободности для этого реле составляет 346,5 мс.
На сети железных дорог датчик ИПД со шлейфом в форме «прямоугольника» эксплуатируется на стрелочных участках, оборудованных, как правило, нормально разомкнутой рельсовой цепью. Отцеп контролируется с момента входа на границу защитного участка, которая может совпадать с изолирующим стыком ИС1, и до выхода за последний изолирующий стык ИС2 рельсовой цепи. При этом индуктивный шлейф прокладывают лишь в зоне защитного участка и остряков, так как шлейф находится в зоне влияния вторичного контура, образованного рельсовой цепью до момента выхода последней оси отцепа за границу рельсовой цепи. В результате длина зоны обнаружения ИПД больше нормативной зоны контроля стрелочного участка и превышает геометрические размеры самого шлейфа (рисунок 2.10).