Файл: 1 Бейсызыты буындарды типтері жне оларды сипаттамалары.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 05.12.2023
Просмотров: 167
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Деңгей-1
1)Бейсызықты буындардың типтері және олардың сипаттамалары
Жүйелердің динамикалық сипаттамаларын зерттеу кезінде оның буындары сызықты деп алынады, себебі бұл жағдайда сызықты теңдеулерді ғана талдау керек, ал суперпозиция принципі математикалық жағынан тиімді түрде сигналдарды құраушыларға жіктеуге мүмкіндік береді, соның нәтиіжесінде қойылған есепті оңай шешуге болады.
Буын бейсызықты деп аталады, егер оның шығыс сигналының кіріс сигналына тәуелділігі сызықты теңдеумен сипатталады.
Бейсызықты буындар екіге бөлінеді: бір мағыналы және бір мағынаслы емес. Олар өз кезегінде үзілісті және үзіліссіз болып жіктеледі.
Статикалық бейсызықты буындар – олардың шығыс шамасы кіріс шамасына тәуелді.
Бейсызықты динамикалық буындар – олардың шығыс шамасы кіріс шамасына және кіріс шамасының туындысына тәуелді.
2)Автоматты басқару жүйесінің бейсызықты элементтерінің математикалық модельдері
Автоматты басқару жүйелері (АБЖ) — бұл ғылым саласы автоматты жүйелер құру принциптері, әдістері есептеу және зерттеу. АБЖ қарайды класс жүйелерінің жұмыс істеу негізі болып табылатын процесс энергиясын түрлендіру (айырмашылығы — ақпараттық жүйелер преобразующих ақпарат).
Автоматты басқару жүйесі (АБЖ) деп аталады жиынтығы басқарылатын объектінің және басқару құрылғылары, өзара іс-қимыл жасайтын сәйкес берілген заңына (алгоритміне). Типтік, құрылымдық схемасы автоматты басқару жүйелері приведенана сур. Басқарылатын техникалық жүйелер деп аталады әдейі әсер ету басқарылатын объектіге қамтамасыз ететін, алға қойған мақсатқа қол жеткізу.
Математикалық модельдер жүйелерді автоматты басқару.
2. Тұрақтылығын анықтау жүйелерін басқару.
3. Сапасын талдау жүйесін.
4. Түзету жүйелері.
5. Міндеттері талдау және синтез, оңтайлы жүйелер.
3. Математикалық моделі АБЖ
3) Бейсызықты автоматты басқару жүйесінің негізгі ерекшеліктері
Бейсызықты жүйе деп бейсызықты дифференциалдық немесе алгебралық теңдеулермен сипатталатын жүйе аталады. Әдетте, бейсызықты жүйе кем дегенде бір бейсызықты буынның, яғни бейсызықты дифференциалдық теңдеулермен сипаттаталатын буындардың бар болуы нәтижесінде алынады.
Бейсызықты жүйелерге келесілері жатады:
1) релелі сипаттамасы бар буын
2) бөлшекті-сызықты типті сипаттамасы бар буын
3) Қисық сызықты сипаттамасы бар буын
4) теңдеу құрамына кіретін айнымалылар мен туындыларының көбейтіндісінен тұратын бейсызықты теңдеулерлермен сипатталатын буын.
5) жұмысы логикалық операцияларды орындаумен байланысты буын.
Релелі сипаттамалар:
а) идеалды реле;
б) сезімсіздік зонасы бар үш жағдайлы реле;
в) гистерезисі бар екі жағдайлы реле;
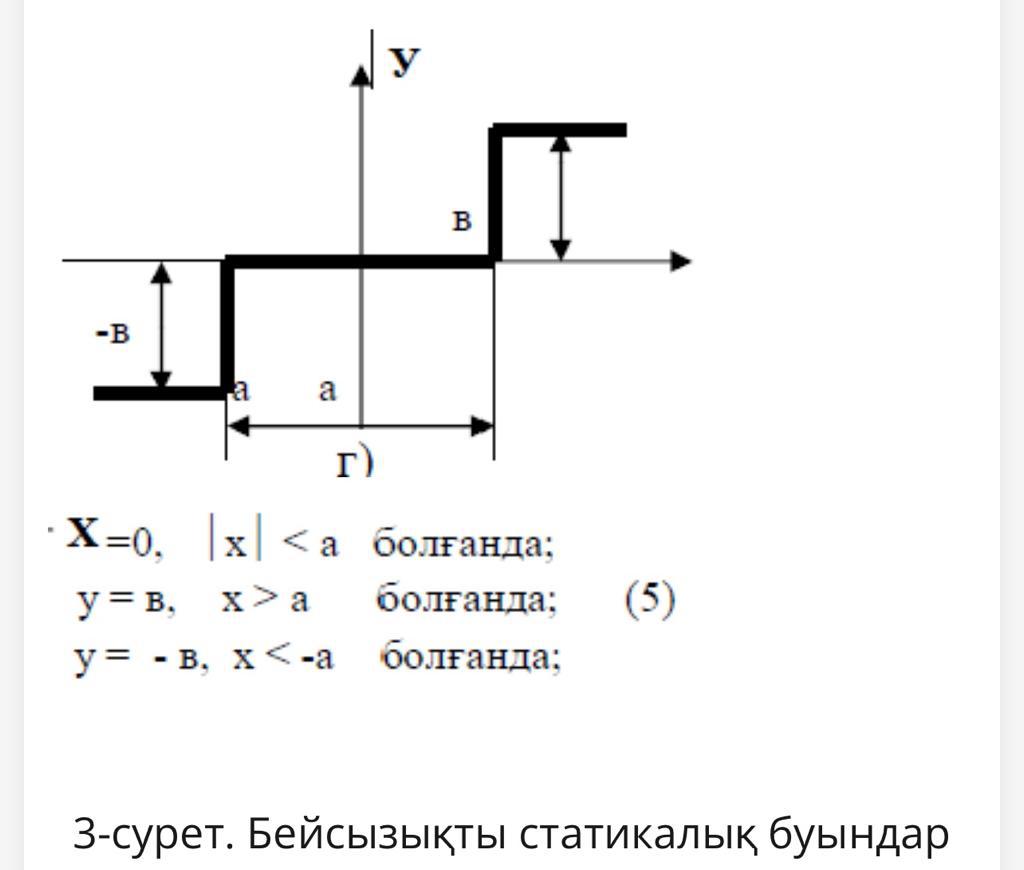
г) Сезімсіздік зонасы бар және гистерезисі бар үш жағдайлы реле.
4)Бөлшек сызықты сипаттама
Сызықтық-бөлшек функциясы - бөлшек түрінде көрсетуге болатын, алымы мен бөлімі сызықтық функция болатын сандық функция. Көпөлшемді сандық кеңістікті бір өлшемді сандық кеңістікке әдетте салыстыратын сызықтық-бөлшек функция маңызды ерекше жағдай болып табылады:
- n = 1 нақты да, күрделі кеңістікте де, жалпы жағдайда еркін дәрежедегі бір айнымалының көпмүшеліктерін пайдаланып бір өлшемді сандар кеңістігін өзіне бейнелейтін рационал функция;
- күрделі кеңістіктегі n = 1 — жалпы жағдайда көпөлшемді күрделі кеңістікті өзіне бейнелейтін сызықтық-бөлшек түрлендіру;
сағ
- нақты кеңістіктегі n = 2, шеңберлерге қатысты инверттеу - Мёбиус түрлендірулері.
5)Қисық сызықты сипаттама
Қисық сызықты сипаттамалар:
а) қаныққан жүйеге тән сипаттама;
б) гистерезисті электромагнитті құрылғылар сипаттмасы;
в) түзеткіш сипаттамасы
Көкжиекке бұрыш жасай лақтырылған дененің қозғалысы, Жердің Күнді айнала қозғалысы кисықсызықты болып табылады. Велосипед немесе автомобиль доңғалақтарындағы нүктелер де кисық сызық бойымен қозғалады , т.с.с.
Дененің қисық траектория бойымен қозғалысы қисықсызықты қозғалыс деп аталады. Дененің қисықсызықты қозғалысы, оның түзусызықты қозғалысы кезіндегі орын ауыстыру, жылдамдық және үдеу сиякты кинематикалық шамалар арқылы сипатталады.
Мысалы, дене қайсыбір қисықсызықты траекторияның бойымен, оның А нүктесінен В нүктесіне қарай қозғалады делік.
Сонда дененің жүрген жолы АВ доғасының ұзындығына тең болады. Ал хорда бойымен бағытталған АВ векторы дененің орын ауыстыруын көрсетеді.
6)Екі деңгейлі идеал реле
1. электр тогымен әрекетке келтірілетін ауыстырып қосқыш.[1][2]
2. көлік құралының электро жабдық жүйесіндегі электр тізбектің жағдайында секірмелі өзгерулерді іске асыруға арналған автоматты құрылғы.
* Блоктауыш реле - көлік қозғаушы оталғанан кейін, стартерді автоматты ешіретін реле.
* Қосу релесі - стратердің тарту релесінің орау тізбегін қосуға және ажыратуға арналған реле.
* Дыбысты сигиал релесі - мембраналардың дірілдеуін қоздыратын, дыбыс сигналының бастырмасының контактыларынан ететін. белгілі бір тоқ күшінің жиілігін кемітетін реле.
* Кері тоқ релесі - аккумулятор кернеуі генератор кернеуінен төмен болған кезде, генераторды аккумулятордан автоматты ажырататын құрылғы.
* Үзілмелі жұмыс релесі - шыны тазалағыш щеткаларын бұрайтын электр-қозғауышты бір тәртіпте косып ажырататын реле.
* Тартқыш реле - иінді жетек арқылы стартердің тісті дөңгелегін іштен жанатын козғауыштың махавигің тісті тэжімен ілінісқае енгізетін және стартердің орамын акуммулятор батареясынан берілетін желісқае қосатын реле.
* Реттейтін реле - аккумулятор батареясын жүктемеге косатын және берілген шектерде керенеулерді ұстауға арналған реле.
7)Үш деңгейлі сезімсіздік аймағы бар реле
Реле элементі деп релелік сипаттамаға ие бөлшектер мен олардың арасындағы қосылыстардың ең аз жиынтығын айтады, яғни физикалық әсерлер кіріске келгенде күрт өзгереді, ол шығыста пайда болады, тұрақты бір әсерден екіншісіне ауысады [2 ]. екі мемлекеттен көп. Мысалы, мұндай құрылғы педометр ретінде қызмет ете алады.
Көбінесе «реле» термині электрлік реле элементін – жұмысы электр тогының ағуынан, электр өрісінің өзгеруінен немесе электр өткізгіштікпен байланысты құбылыстардан туындайтын құбылыстарға негізделген реле элементін білдіреді [ 18]. Стандарттау жүйесінде «электрлік реле» термині тек кіріс және шығыс тізбектері арасында тек бір түрлендіру операциясын орындайтын реле үшін ғана қолданылады.
8)Екі деңгейлі гистеризисі бар реле
Реле орамының қоректенуіне және магнит өрісін құру әдісіне байланысты тұрақты және айнымалы токтың электромагниттік релелері бөлінеді. Өз кезегінде тұрақты ток электромагниттік релелер бейтарап және поляризацияланған болып бөлінеді. Бейтарап релелерде орамдағы ток бағытына қарамастан, контактілердің бірдей топтары жұмыс істейді. Поляризацияланған релелерде орамдағы токтың бір бағытымен контактілердің бір тобы, токтың басқа бағытымен, басқа контактілер тобы іске қосылады.
Якорь қозғалысының сипаты бойынша электромагниттік бейтарап реле екі түрге бөлінеді: айналмалы якорь және тартылатын арматура.
Отандық өнеркәсіп әртүрлі қолдану үшін әртүрлі типтегі электромагниттік релелердің үлкен санын шығарады. Өнеркәсіптік автоматтандыру үшін жақында RP20, RP21 және RPL сериялы қондырмалары бар аралық релелер игерілді. RP20 және RP21 релелері айнымалы ток желісінен 440 В дейін және тұрақты ток желісінен 220 В дейін қоректенетін электр жетектерін басқару тізбектерінде қолданылады. Оларда доғаны сөндіруге арналған құрылғылар мен контактілер саны 8-ге дейін болуы мүмкін. RPL релелері қолданылады. кернеуі 660 В дейінгі айнымалы ток тізбектерін және кернеуі 440 В дейінгі тұрақты ток тізбектерін ауыстырып қосу үшін. Бұл релелер контактілер саны бойынша (төрт ашу және жабу контактілеріне дейін), PVL қондырмалары бойынша ерекшеленетін PKL типті қондырмалармен жабдықталған. , 0,1-ден 180 с-қа дейінгі уақыт кідірісін қамтамасыз ету, реле орамасының кернеуін өшіргеннен кейін контактілі релелік жүйелерді қосулы күйде ұстауды қамтамасыз ететін PPL қосымшалары.
9)Үш деңгейлі сезімсіздік аймағы бар гистеризисті реле
Релелік жүйелердің бірқатар артықшылықтары бар, соның арқасында олар автоматты басқару жүйелерінде кеңінен қолданылады: - конструкцияның қарапайымдылығы және пайдаланудағы сенімділігі; - жоғары жылдамдық немесе іс жүзінде инерцияның болмауы; - кіріс сигналының кең ауқымды өзгерістерімен шығыс параметрінің тұрақтылығы; - жұмыстың күрделі логикалық алгоритмін жүзеге асыру мүмкіндігі; Статикалық сипаттамасы бойынша релелік жүйелер бір мәнді статикалық сипаттамасы бар жүйелерге және реленің анық емес статикалық сипаттамасы бар жүйелерге бөлінеді, мысалы, гистерезис контуры бар реле. Жұмыс режимінің ерекшеліктері бойынша релелік жүйелерді екі топқа бөлуге болады [10,11,12]. Біріншісіне реле ашық-тұйық алгоритм бойынша жұмыс істейтін жүйелер жатады. Бұл жағдайда реттеуші орган штаттардың шектеулі санын иеленуі мүмкін. Әдетте екі (екі позициялық реледе) немесе үш (үш позициялық реледе). Жұмыс режимінің ерекшелігі сыртқы кезеңдік әсер болмаған жағдайда олардың жұмыс режимі тербелмелі болуы мүмкін. Екінші топқа реле жетектің тұрақты жылдамдығын немесе дәлірек айтқанда басқару сигналына тәуелді емес жылдамдықты қамтамасыз ететін жүйелерді қамтиды. Әдетте бұл іске қосу қозғалтқышы және икемді кері байланысы бар жүйелер. Бірінші топтағы релелік жүйелерден айырмашылығы, мұндай жүйелерде өздігінен тербеліс қажет емес. Олар өте аз мәнді жоюға немесе азайтуға тырысады. Сызықтық бөліктің сипаттамалары бойынша релелік жүйелер тұрақты, бейтарап және тұрақсыз сызықтық бөлігі бар жүйелерге бөлінеді. Мұндай жүйелердің негізгі тізбегінде реле элементтерін немесе қайтару тізбегіндегі түзетуші буын ретінде пайдалану бейтарап және тұрақсыз сызықтық бөлігі бар жүйенің тұрақтылығын ғана емес, сонымен қатар жүйенің көрсетілген динамикалық қасиеттерін қамтамасыз етуге мүмкіндік береді.
10)Бейсызықты жүйені зерттеудегі фазалық жазықтық
1. Фазалық жазықтықта y=0 мәнінде, өзгеру жылдамдығы нөлге тең.
2. y –тің оң кезінде, яғни фазалық жазықтықтың жоғарғы жағында бейнелеуші нүкте сНӘдан оңға қарай жылжиды, ал y -тің теріс мәнінде, яғни фазалық жылдамдықтың төмен жағында керісінше оңнан сНӘға қарай жылжиды.
3. фазалық траекториялар өзара бір-бірімен қиылыспайды. Тек айрықша өрнектерде қиылысуы мүмкін.
Фазалық траекториялар y=f(x) фазалық теңдеуі бойынша салынады, оны табудың алдында ең алдымен жүйенің бастапқы дифференциалды теңдеулерінен фазалық траекториясының дифференциалды теңдеуін аламыз.
Бірінші теңдеуді екінші теңдеуге бөле отырып уақыттан арыламыз.
11 Ерекше нүктелердің түрлері және екінші дәрежелі бейсызықты жүйенің фазалық кескіні
Ерекше нүктелер- бұл жүйенің тепе теңдік кезіндегі нүкте.Екінші ретті сызықты жүйенің теңдеуі келесі түрде жазылады:
 (2.17)
(2.17)Енді оның фазалық траекториясы мен ерекше нүктелерін қарастырайық.Оларды анықтау реті төменде көрсетілген.
1) Ерекше нүктелерді анықтау үшін сәйкесінше жүйенің тепе-теңдік күйіне шарт қойылады.
(2.16)


2) Координаталардың аз ауытқуларында ерекше нүкте шартараптарында теңдеулердің сызықтауы орындалады.
3) Бекітілген мінездемелік теңдеудің түбірлері бойынша ерекше нүктенің түрі анықталады.
Мысал қарастырайық:жүйенің теңдеуі (2.18)
 (2.18)
(2.18)Фазалық траекторияның теңдеуі келесі түрде
 (2.19)
(2.19)Ерекше нүктелерді анықтау үшін шарт бойынша (2.16), Х=Y1.Y=Y2 деп белгілейміз, жүйе теңдеуін құрамыз (2.20)
 (2.20)
(2.20)Шешімі: теңдеулердің алған жүйесін өзгертеміз
 (2.21)
(2.21)Жүйенің теңдеуі түбірлер арқылы шешіледі
 (2.22)
(2.22) -
Орнықтылық пен автотербелісті зерттеудің нақты дәл әдістері