ВУЗ: Московский государственный агроинженерный университет имени В.П. Горячкина
Категория: Методичка
Дисциплина: Не указана
Добавлен: 06.02.2019
Просмотров: 1998
Скачиваний: 7
МИНИСТЕРТВО СЕЛЬСКОГО ХОЗЯЙСТВА И ПРОДОВОЛЬСТВИЯ
РОССИЙСКОЙ ФЕДЕРАЦИИ
ДЕПАРТАМЕНТ КАДРОВОЙ ПОЛИТИКИ И ОБРАЗОВАНИЯ
Московский государственный агроинженерный университет
имени В.П. Горячкина
С.Г. Ломакин
Расчет рабочих органов
уборочных машин
Методические рекомендации по выполнению
курсовой работы
Курсовая работа состоит из двух частей:
I. Расчет показателей работы режущего аппарата.
II Расчет показателей работы молотилки зерноуборочного комбайна.
Исходные данные по каждому варианту задания приведены в табл. 1,2 и на рис.1.
Таблица 1
Исходные данные по вариантам
|
Вари- анты
№ |
Ширина захвата режущего аппарата, В,м |
Частота * вращения вала привода ножа, n,мин-1 |
* Скорость движения агрегата,
|
Тип режущего аппарата (ТРА) |
Площадь нагрузки,
fн,см2 |
Устано-вочная высота среза, Ну,см |
Урожай-ность зерна пшеницы, À ,т/га |
Отношение массы соломы к массе зерна mс : mз |
Убираемая площадь. S,га |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
1 |
2,8 |
560 |
3,0 |
1 |
115 |
5 |
3,0 |
1,25 |
400 |
|
2 |
3,5 |
550 |
2,0 |
2 |
100 |
7 |
2,8 |
1,35 |
500 |
|
3 |
4,9 |
480 |
2,4 |
3 |
60 |
10 |
3,4 |
1,3 |
800 |
|
4 |
4,1 |
540 |
2,0 |
2** |
90 |
8 |
3,6 |
1,2 |
700 |
|
5 |
4,6 |
520 |
2,5 |
4 |
50 |
10 |
3,2 |
1,33 |
900 |
|
6 |
5,0 |
490 |
1,8 |
5 |
70 |
6 |
3,1 |
1,5 |
1000 |
|
7 |
6,0 |
470 |
1,6 |
6 |
80 |
5 |
3,8 |
1,4 |
1200 |
|
8 |
7,0 |
580 |
2,0 |
7 |
88 |
6 |
2,5 |
1,42 |
1400 |
|
9 |
4,0 |
460 |
1,6 |
1 |
65 |
10 |
3,0 |
1,5 |
1000 |
|
10 |
4,8 |
480 |
1,8 |
2** |
85 |
6 |
2,4 |
1,6 |
1200 |
|
11 |
5,0 |
450 |
2,0 |
3 |
55 |
7 |
3,2 |
1,45 |
1000 |
|
12 |
5,5 |
470 |
2,3 |
4 |
40 |
8 |
2,6 |
1,55 |
1300 |
|
13 |
6,0 |
480 |
2,0 |
5 |
78 |
5 |
2,1 |
1,6 |
1200 |
|
14 |
7,5 |
490 |
2,0 |
6 |
90 |
6 |
2,8 |
1,4 |
1500 |
|
15 |
9,0 |
560 |
3,3 |
7 |
150 |
10 |
1,8 |
1,5 |
2000 |
|
16 |
6,7 |
540 |
3,0 |
7 |
120 |
8 |
1,6 |
1,45 |
2000 |
|
17 |
7,0 |
570 |
3,4 |
6 |
130 |
10 |
1,7 |
1,4 |
2500 |
|
18 |
6,0 |
470 |
1,5 |
1 |
68 |
7 |
1,8 |
1,5 |
1600 |
|
19 |
5,8 |
460 |
1,8 |
2 |
90 |
6 |
2,0 |
1,3 |
1500 |
|
20 |
5,5 |
450 |
2,6 |
3 |
75 |
10 |
2,4 |
1,4 |
1800 |
|
21 |
5,4 |
480 |
2,4 |
4 |
45 |
5 |
2,6 |
1,2 |
1600 |
|
22 |
5,2 |
500 |
1,8 |
5 |
65 |
6 |
2,4 |
1,3 |
1500 |
|
23 |
5,0 |
510 |
1,6 |
6 |
67 |
5 |
4,0 |
1,25 |
1400 |
|
24 |
5,8 |
570 |
2,5 |
7 |
80 |
7 |
4,3 |
1,3 |
1500 |
|
25 |
6,8 |
540 |
3,0 |
7 |
115 |
8 |
2,1 |
1,4 |
2000 |
|
26 |
5,9 |
475 |
2,4 |
4 |
45 |
10 |
2,5 |
1,5 |
1500 |
|
27 |
4,1 |
460 |
1,9 |
1** |
80 |
5 |
2,3 |
1,6 |
1800 |
|
28 |
4,8 |
450 |
1,7 |
2** |
90 |
6 |
2,6 |
1,7 |
1400 |
|
29 |
6,8 |
480 |
2,5 |
6 |
110 |
6 |
2,8 |
1,4 |
2000 |
|
30 |
9,0 |
570 |
3,3 |
7 |
120 |
7 |
2,1 |
1,2 |
4000 |
|
31 |
8,6 |
580 |
3,0 |
7 |
110 |
6 |
1,9 |
1,45 |
4200 |
|
32 |
8,0 |
475 |
3,2 |
6 |
145 |
8 |
2,2 |
1,25 |
3800 |
|
33 |
4,0 |
480 |
1,6 |
1 |
68 |
5 |
3,4 |
1,35 |
3200 |
|
34 |
4,8 |
460 |
1,8 |
2 |
94 |
6 |
3,1 |
1,4 |
3400 |
|
35 |
6,4 |
440 |
2,0 |
3 |
60 |
10 |
3,5 |
1,2 |
3000 |
|
36 |
6,3 |
470 |
2,2 |
4 |
42 |
8 |
3,0 |
1,35 |
3500 |
|
37 |
6,2 |
450 |
1,8 |
5 |
74 |
6 |
4,9 |
1,15 |
2800 |
|
38 |
6,0 |
460 |
2,4 |
6 |
105 |
7 |
4,0 |
1,0 |
2900 |
|
39 |
5,8 |
570 |
2,7 |
7 |
100 |
6 |
4,1 |
1,1 |
2800 |
|
40 |
6,8 |
580 |
3,0 |
7 |
110 |
8 |
3,1 |
1,3 |
3500 |
|
41 |
7,0 |
455 |
3,3 |
6 |
155 |
10 |
2,9 |
1,2 |
4500 |
|
42 |
4,2 |
780/450 |
3,6 |
1** |
100/80 |
5 |
3,5 |
1,4 |
1800 |
|
43 |
3,6 |
600/460 |
3,4 |
2** |
144/85 |
10 |
3,3 |
1,5 |
1000 |
|
44 |
5,0 |
440 |
1,9 |
3 |
56 |
8 |
2,7 |
1,6 |
1500 |
|
45 |
5,3 |
450 |
2,0 |
4 |
40 |
6 |
2,4 |
1,7 |
1800 |
|
46 |
5,6 |
460 |
1,7 |
5 |
68 |
5 |
4,1 |
1,25 |
2000 |
|
47 |
4,3 |
470 |
2,0 |
1 |
88 |
7 |
3,2 |
1,36 |
1400 |
|
48 |
3,8 |
570 |
2,4 |
2 |
105 |
6 |
2,0 |
1,57 |
1300 |
|
49 |
7,3 |
500 |
2,8 |
6 |
120 |
6 |
2,2 |
1,3 |
4200 |
|
50 |
4,9 |
540 |
1,8 |
7 |
68 |
5 |
3,8 |
1,4 |
2000 |
|
51 |
5,9 |
540 |
2,2 |
7 |
95 |
7 |
3,7 |
1,5 |
4000 |
|
52 |
5,0 |
480 |
2,0 |
6 |
86 |
8 |
4,4 |
1,25 |
3500 |
|
53 |
4,6 |
450 |
1,6 |
1 |
70 |
5 |
3,0 |
1,6 |
2000 |
|
54 |
4,2 |
440 |
1,5 |
2 |
80 |
5 |
4,7 |
1,3 |
1800 |
|
55 |
3,4 |
580/540 |
3,0 |
2** |
140 |
7 |
3,4 |
1,2 |
1200 |
|
56 |
5,0 |
760/540 |
3,7 |
1** |
110 |
8 |
3,2 |
1,1 |
3000 |
|
57 |
7,4 |
420 |
2,2 |
3 |
70 |
6 |
2,6 |
1,4 |
4500 |
|
58 |
7,8 |
460 |
1,9 |
4 |
36 |
5 |
3,6 |
1,05 |
5200 |
|
59 |
8,4 |
455 |
1,7 |
6 |
75 |
6 |
4,7 |
1,0 |
6000 |
|
60 |
9,2 |
545 |
1,5 |
7 |
55 |
5 |
5,6 |
1,15 |
5500 |
* Студенту выдается
только один показатель: частота вращения
кривошипного вала (n),
либо скорость движения агрегата (![]() );
);
** - механизм привода МКШ открытого типа; числитель использовать при расчете Р.А.; знаменатель – для определения υ при расчете молотилки зерноуборочного комбайна.

Рис.1. Схемы сегмента (а) и противорежущей (б) пластины.
Основные размеры сегментов и противорежущих пластин Р. А. сегментно- пальцевого типа
Таблица2
|
Тип режущего аппарата (ТРА) |
Соотношение параметров, мм |
Основные размеры, мм |
|||||||
|
|
|
a |
b |
h0 |
hр |
t |
c |
e |
h1/h1р |
|
1;1** |
t=t0=S=76,2 |
14 |
80 |
54 |
42 |
76 |
22 |
36 |
58/46 |
|
2;2** |
t=t0=S=90 |
14 |
85 |
55 |
50 |
90 |
24 |
38 |
60/55 |
|
3 |
2t=2t0=S=152,4 |
13 |
85 |
55 |
55 |
76 |
21 |
29 |
60 |
|
4 |
2t=2t0=101,6 |
12 |
75 |
45 |
45 |
50,8 |
20 |
25 |
53 |
|
5 |
t=2t0=S=101,6 |
6 |
75 |
45 |
-- |
101,6 |
18 |
20 |
50 |
|
6 |
″n″t=″n″t0=S=88 |
14 |
80 |
57 |
42 |
76 |
23 |
37 |
57/46 |
|
7 |
″n″t=″n″t0=S=84 |
12 |
80 |
60 |
54 |
76 |
23 |
35 |
58 |
I. Расчет технологических и энергетических показателей работы
режущего аппарата
1.1. Рассчитать
скорость движения уборочной машины
![]() ,
м/с или
частоту вращения кривошипного вала
механизма привода ножа n,
мин-1
,
м/с или
частоту вращения кривошипного вала
механизма привода ножа n,
мин-1
Скорость движения
машины можно найти по заданным площади
нагрузки fн
и частоте вращения n
кривошипного вала механизма привода
ножа режущего аппарата. Используя
зависимости для подачи режущего аппарата
L=![]() t1/2
и площади нагрузки fн
= к ∙L∙S
( Р.А. № 1;2;3;4;5) или fн
= (к∙ L∙
S)/″n″,
t1/2
и площади нагрузки fн
= к ∙L∙S
( Р.А. № 1;2;3;4;5) или fн
= (к∙ L∙
S)/″n″,
(Р.А.№ 6;7).
где t1/2-
время, за которое кривошипный вал
совершит поворот на угол![]() ,
с; к - коэффициент пропорциональности
между площадями подачи и нагрузки
режущего аппарата; S
- ход ножа, мм, получим выражение для
определения
,
с; к - коэффициент пропорциональности
между площадями подачи и нагрузки
режущего аппарата; S
- ход ножа, мм, получим выражение для
определения
![]() = 10-1
∙
fн∙
n/30∙к∙S,
м/с; или υ = 10-1∙fн″n″∙n/30∙к∙S,
м/с
(1)
= 10-1
∙
fн∙
n/30∙к∙S,
м/с; или υ = 10-1∙fн″n″∙n/30∙к∙S,
м/с
(1)
Следует помнить, что для Р.А. t = t0 = S и ″n″∙t=″n″∙t0=S к = 1, а для аппаратов
2t = 2t0 = S и t = 2t0 = S необходимо подставить в формулу (1) большее из двух значений к (0,32 для первого и 0,68 для второго).
Например, для 2t = 2t0 = S = 152,4 мм при n = 480 мин-1 и fн = 55 см2,
![]() = 10-1
∙55∙ 480/30 ∙0,32 ∙152,4 = 1,8 м/с
= 10-1
∙55∙ 480/30 ∙0,32 ∙152,4 = 1,8 м/с
Если в исходных
данных задана скорость движения агрегата
![]() ,
то в разделе 1.1. необходимо определить
частоту вращения кривошипного вала
механизма привода ножа n
.
,
то в разделе 1.1. необходимо определить
частоту вращения кривошипного вала
механизма привода ножа n
.
Решив выражение (1) относительно n, имеем
для Р.А. №
1;2;3;4;5
![]() ,
мин-1,
или
,
мин-1,
или
![]() .
.
для Р.А. № 6;7
-
Определение скорости резания стеблей
Из кинематики относительного движения ножа известно, что скорость относительного движения ножа изменяется в функции угла поворота t:
- кривошипного вала аксиального кривошипно-ползунного механизма привода ножа
Uн = r ∙∙sint, (2)
где:
r - радиус кривошипа (r = S/2),м;
- угловая скорость кривошипа, с-1;
- ведущего вала механизма качающейся шайбы
Uн
= l∙
sin![]() ∙
∙![]() ∙sint,
(3)
∙sint,
(3)
где:
l -длина рычага колебательного вала МКШ, м
![]() -угол
наклона шейки ведущего вала к его оси
вращения, град
-угол
наклона шейки ведущего вала к его оси
вращения, град
-угловая скорость ведущего вала, с-1
-водила Н планетарного редуктора
Uн= (r1+r2)∙н ∙sinн ∙t (4)
где:
r1 - радиус эксцентриситета ( смещения ) оси вала саттелита относи- тельно оси вращения водила, м
r2 - радиус кривошипа вала саттелита, м
н - угловая скорость водила, с-1
Функциональную зависимость скорости относительного движения ножа от его перемещения (х) Uн = f(х) легко установить из рис. 2(а, б, в).
Из
![]() ОВС
(рис.2а) следует, что вертикальная текущая
координата ″у″
ОВС
(рис.2а) следует, что вертикальная текущая
координата ″у″
точки В кривошипа определяется по выражению
у = r∙sint. (5)
По аналогии из рисунков 2б и 2в следует, что
у = l∙sin![]() ∙sint
и (6)
∙sint
и (6)
у = (r1+r2)∙sinн ∙t
(7)

Рис. 2. К определению функциональной зависимости Uн = f(х)
Сопоставление выражений 2 и 5; 3 и 6; 4 и 7, показывает, что скорость движения ножа в любой точке в пределах хода S может быть определена как произведение текущей координаты ″у″ и постоянной величины (н),
т.е. Uн = y∙ или Uн =у∙н. Следовательно, дуга окружности радиуса r
либо l
sin![]() ,
либо (r1+r2)
является графиком изменения скорости
движения ножа в функции его перемещениях
хода (Uн
=f(x)).
,
либо (r1+r2)
является графиком изменения скорости
движения ножа в функции его перемещениях
хода (Uн
=f(x)).
Масштаб графика u = (u = н)
С учетом этой зависимости определение скорости резания становится простой графоаналитической задачей. Для ее решения необходимо начертить в масштабе 1:1 контуры сегмента (рис. 3) и противорежущих пластин, причем сегмент должен находиться в одном из двух крайних положений (левом или правом).
Для Р.А. нормального резания с одинарным и некратным ходом ножа достаточно изобразить контуры двух противорежущих пластин (рис. 3а,3г), а для аппаратов нормального резания с двойным пробегом ножа (2t = 2t0 = S - рис. 3б) и низкого резания (t = 2t0 = S - рис. 3в) - контуры трех пластин.
Из точки А (начало лезвия сегмента) проведем оси координат (ХАУ) и отложим вдоль оси абсцисс величину хода ножа S = 2r. Из центра этого отрезка проводим дугу окружности радиуса r - график Uн А = f(х), (либо окружности радиусов
l∙
sin![]() или (r1+r2)
).
или (r1+r2)
).
Поскольку сегмент срезает стебли только на кромке противорежущей пластины, начало резания наступает тогда, когда точка А лезвия переместится в положение А1 (достигнет кромки противорежущей пластины), а все лезвие в положение А1В1. Скорость любой точки ножа в этот момент, в том числе и точки А, которой лезвие начинает срез стеблей, и есть скорость начала резания.
Ее величина равна произведению длины ординаты у1 = А1К1 в метрах, восстановленной из точки А1 до пересечения с кривой графика UнА = f(х), и масштабного коэффициента u = , т.е.
Uн 1 = у1∙, м/с. (4)
При ограничении рабочей высоты лезвия (hр) начало резания наступит
когда точка А лезвия достигнет кромки противорежущей пластины. Проведя через точку пересечения лезвия (т.А) и кромки противорежущей пластинки линию параллельную АВ найдем положение лезвия А1В1 в момент начала резания, ординату у1=А1К1 и скорость начала резания Uн1=у1 ( Uн1=у1 ∙ н)
Значение угловой скорости определяют по соотношению
=
![]() .
.
где: n - частота вращения кривошипного вала, мин-1.
Или н
=
![]() .
.
где: n – число двойных ходов ножа, мин-1


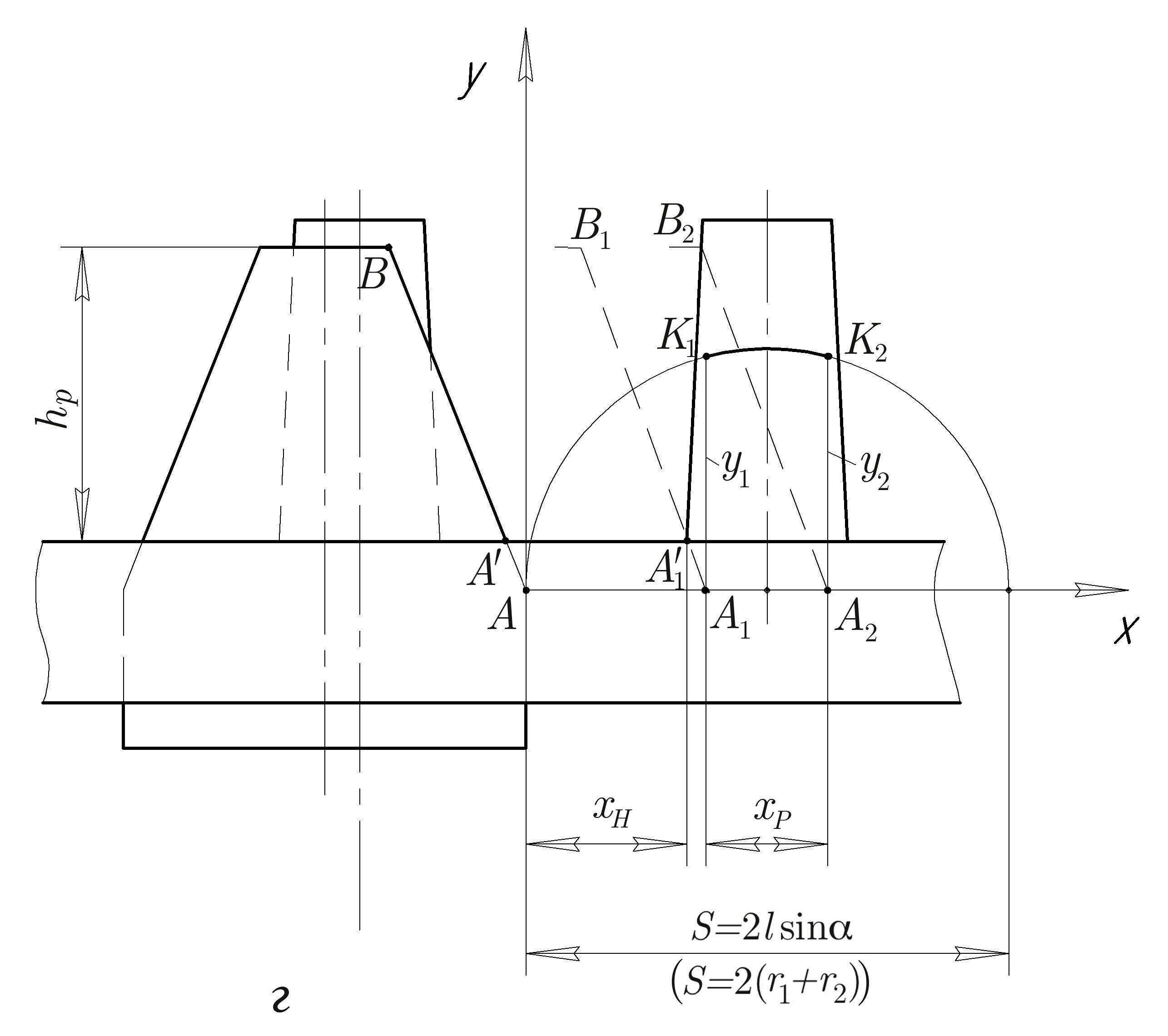

Рис. 3. К определению скоростей резания: а) t = t0 =S; б) 2t = 2t0 =S;
в) t = 2t0 =S, г) ″n″t=″n″t0=S.
Лезвие сегмента при дальнейшем движении будет срезать стебли другими участками (точками) своей длины вплоть до крайней точки В. Поскольку скорость движения ножа меняется от 0 в начале хода до максимального значения (Uн мах = r) в середине и снова до 0 в конце хода, скорости резания будут непрерывно меняться от найденной начальной Uн1 до конечной Uн2. Момент окончания резания наступит тогда, когда точка В лезвия сегмента достигнет кромки противорежущей пластины (точка В2), а само лезвие расположится по линии В2 А2 . Скорость движения сегмента в данный момент - скорость конца резания - определим по графику Uн2 = y2 (y2 = А2 К2), или (Uн2 = y2 н).
Из графика видно, что лезвие сегмента срезает растения только на участке А1 А2 своего хода. Этот участок хода является рабочим и обозначается хр.
До него и после нож совершает холостой ход.
У Р.А. нормального резания с двойным пробегом ножа -
(2t = 2t0 = S - рис.3б) лезвие сегмента за один ход срезает растения у двух пальцев (1 и 2). По аналогии с рассмотренным выше начало резания у первого пальца соответствует положению лезвия А1В1, а конец резания - А2 В2. Скорость резания у первого пальца будет изменяться от Uн1 = y1 до Uн2 = y2 . Момент начала резания у второго пальца будет соответствовать положению лезвия А3 В3 и конца резания - А4 В4. Скорость резания у второго пальца будет изменяться от Uн3 = y3 в начале до Uн4 = y4 в конце резания. Из всего хода S нож совершает полезную работу на участках хр1 у первого и хр2 у второго пальцев, причем хр1 = хр2.
Особенности соотношения параметров Р.А. низкого резания -
(t = 2t0 = S - рис. 3в) обусловливают отсутствие участка холостого хода сегмента хн1 до начала резания стеблей у первого пальца, так как в крайних положениях сегмента часть его лезвия перекрывается противорежущей пластиной. Следовательно, участок лезвия вблизи точки А будет подходить к кромке противорежущей пластины первого пальца со скоростью Uн, близкой к нулю (начало хода ножа). Попадание стеблей на эту часть режущей пары будет приводить к повышенным силовым нагрузкам на элементы режущей пары и забиванию режущего аппарата.
Для исключения возможности резания стеблей участком лезвия около точки А со скоростями ножа Uн, близкими к нулю, и тем самым предотвращения технологических и технических отказов в Р.А. низкого резания на стадии проектирования (разработки конструкции) предусматривают специальные конструктивные элементы, ограничивающие длину рабочей части лезвия участком А′В. Положение точки А′ по длине лезвия АВ устанавливают из условия
Uн1![]() 0, 5 м/с. При такой скорости начала резания
стеблей лезвием у первого пальца ордината
у1
на графике скоростей может быть определена
по выражению
0, 5 м/с. При такой скорости начала резания
стеблей лезвием у первого пальца ордината
у1
на графике скоростей может быть определена
по выражению
y1
![]()
![]() , м.
, м.
Положение лезвия А1 В1, соответствующее моменту начала резания у первого пальца, найдем следующим построением. Отложим вдоль оси У ординату у1 и проведем из полученной точки прямую, параллельную оси абсцисс, до пересечения с восходящим участком кривой графика Uн А = f (х) в точке К1. Опустим из точки К1 перпендикуляр К1А1 на ось абсцисс. Проведем из полученной точки А1 линию, параллельную лезвию АВ, и отложим на ней отрезок А1В1, равный длине лезвия. Это и будет искомое положение лезвия, а точка А′ пересечения линии А1В1 и кромки противорежущей пластины будет началом рабочего участка лезвия. Следовательно, конструктивные элементы, ограничивающие минимальную скорость начала резания Uн1 и длину рабочего участка лезвий сегментов, располагаются на расстоянии l0 от оси абсцисс (основания противорежущей пластины), а рабочая высота сегмента будет равна hp=h0 - l0.
Моменту конца резания у первого пальца будет соответствовать положение лезвия А2В2. Скорость конца резания у первого пальца Uн2 = у2·.
Резание стеблей
у второго пальца начинается в момент,
когда точка А′ достигнет кромки второй
противорежущей пластины и лезвие займет
положение А3В3,
а закончится при достижении точкой В
положения В4
(положение лезвия А4В4).
Скорости резания стеблей у второго
пальца будут изменяться от Uн3
= y3∙![]() в начале до Uн4
= у4·
в конце резания.
в начале до Uн4
= у4·
в конце резания.
Из графиков видно, что скорости резания стеблей лезвиями сегментов зависят не только от основных конструктивных (t, t0, S) и кинематических параметров (Uн), но и от взаиморасположения сегментов и пальцев в крайних положениях ножа. Полученные скорости резания для Р.А.№ 1;2;1**;2**;3;4;5; соответствуют совпадению в крайних положениях осей сегментов с осями пальцев после тщательного выполнения одной из основных регулировок - центрирование ножа или установки одинакового перебега (+ х) ножа в обоих крайних положениях для аппаратов ″n″t=″n″t0=S. На практике эти регулировки выполняют с большой погрешностью или не выполняют вовсе и оси сегментов в крайних положениях не совпадают (рис. 4) с осями пальцев на величину х (+ х - перебег влево от оси пальца; - х - недобег до оси пальца), а у Р.А. ″n″t=″n″t0=S величины перебега сегмента различны у правого и левого пальцев.