ВУЗ: Московский государственный агроинженерный университет имени В.П. Горячкина
Категория: Методичка
Дисциплина: Не указана
Добавлен: 06.02.2019
Просмотров: 2002
Скачиваний: 7

Рис. 4. Варианты расположения осей сегментов и пальцев в крайнем левом положении ножа: а) - совпадение осей; б) - перебег ( + х) влево от оси пальцев; в - недобег ( - х ) до оси пальцев.
Величина перебега увеличивает, а недобега уменьшает холостой ход ̿Хн до начала резания и соответственно увеличивает (+ х) и уменьшает (- х) скорость начала резания у первого пальца.
С другой стороны, перебег ( + х) приводит к уменьшению, а недобег (- х) к увеличению холостого хода после окончания резания.
Следовательно, скорость конца резания у Р.А. t = t0 = S и скорость резания у вторых пальцев Р.А. 2t = 2t0 = S и t = 2t0 = S снижаются при + х и возрастают при - х. Особенно велико влияние перебега или недобега на изменение скоростей резания и надежность технологического процесса у Р.А. низкого резания.
-
Построение траектории абсолютного движения точки А лезвия сегмента
При работе Р.А.
любая точка ножа и в том числе точка А
лезвия сегмента совершает сложное
движение: относительное возвратно -
поступательное с законом х = r∙(1
-
cos![]() t),
х = l∙sinα
(1 - cos
t),
х = l∙sinα
(1 - cos![]() t),
либо х = (r1+r2
) ( 1
- cos
t),
либо х = (r1+r2
) ( 1
- cos![]() н
t)
и переносное прямолинейное равномерное
вместе с машиной с законом
н
t)
и переносное прямолинейное равномерное
вместе с машиной с законом
у = υ ∙ t.
Траекторию абсолютного движения проще всего получить графическим суммированием перемещений в двух названных движениях (рис.5).
Для этого необходимо
в масштабе 1:1 начертить контур сегмента
и нанести оси координат с началом в
точке А (начало лезвия). Относительное
движение осуществляется вдоль оси
абсцисс, а переносное - со скоростью
поступательного движения машины
![]() вдоль оси ординат. Отложим на оси абсцисс
величину хода ножа S
= 2∙r,
либо S=2∙l∙sin
α
, либо S=(r1+r2).
За время перемещения ножа из крайнего
(точка А0)
левого положения в правое (точка Ак)
в относительном движении каждая его
точка переместится вместе с машиной в
переносном движении (вдоль оси ординат)
на величину L,
называемую подачей режущего аппарата.
вдоль оси ординат. Отложим на оси абсцисс
величину хода ножа S
= 2∙r,
либо S=2∙l∙sin
α
, либо S=(r1+r2).
За время перемещения ножа из крайнего
(точка А0)
левого положения в правое (точка Ак)
в относительном движении каждая его
точка переместится вместе с машиной в
переносном движении (вдоль оси ординат)
на величину L,
называемую подачей режущего аппарата.

Рис. 5. Траектория абсолютного движения точки А лезвия сегмента
Из зависимости для определения площади нагрузки fн = кLS имеем
L
=
![]() (S
- в см; к
= 1 для Р.А. t
= t0
= S;
к = 0,32 для Р.А. 2t
= 2t0
= S
и
(S
- в см; к
= 1 для Р.А. t
= t0
= S;
к = 0,32 для Р.А. 2t
= 2t0
= S
и
к = 0,68 для Р.А. t = 2t0 = S).
Так как для Р.А.
″n″t=″n″t0=S
(S=84мм.
или 88 мм.) F=fн
=
![]() подачу L
определяем по зависимости L
=
подачу L
определяем по зависимости L
=
![]() , (К=1)
, (К=1)
Величину подачи L необходимо отложить вдоль оси ординат от точки Ак.
Из кинематики ножа
известно, что перемещение ножа в
относительном движении подчиняется
уравнению х = r
(1 - cos
![]() t)[
х = l
sinα
(l
- cos
t)[
х = l
sinα
(l
- cos![]() t)
или
t)
или
х = (r1+r2)
(l
- cos![]() н
t)].
Поэтому для определения положения точки
А в относительном движении достаточно
на отрезке - ААк
= S
= 2r
н
t)].
Поэтому для определения положения точки
А в относительном движении достаточно
на отрезке - ААк
= S
= 2r
( S=2 l sinα или S=2(r1+r2) ) провести дугу окружности радиуса r
(
l
sinα
или r1+r2),
выбрать любой угол
![]() t
и через центр кривошипа ,повернутого
на угол
t
и через центр кривошипа ,повернутого
на угол
![]() t,
провести линию, перпендикулярную оси
абсцисс. На этой линии и будет находиться
точка А лезвия в относительном движении
в момент времени t.
t,
провести линию, перпендикулярную оси
абсцисс. На этой линии и будет находиться
точка А лезвия в относительном движении
в момент времени t.
Достаточная
точность построения траектории
абсолютного движения точки ножа будет
обеспечена, если угол поворота кривошипного
вала ведущего вал МКШ или водила
планетарного привода
![]() =
=
![]() ,
соответствующий ходу ножа S,
и величину подачи L
разбить на 6 и более равных между собой
интервалов (участков), т.е.
,
соответствующий ходу ножа S,
и величину подачи L
разбить на 6 и более равных между собой
интервалов (участков), т.е.
![]()
![]() 300
и
300
и
![]() см.
см.
Обозначим границы
участков по углу поворота кривошипа
цифрами 1,2,3,…,6, а по направлению
поступательного движения машины
соответственно
![]() .
.
Проведем через
точки 1,2,3,…,6 вертикальные линии, а через
точки
![]() горизонтальные.
горизонтальные.
Поскольку в
относительном движении точка А при
углах поворота кривошипного вала 30, 60,
900
….180° будет находиться на вертикальных
линиях, проведенных соответственно
через точки 1,2,3,…,6, а в переносном
движении на горизонталях, проведенных
через точки![]() ,
то в абсолютном движении - на пересечении
(точки
,
то в абсолютном движении - на пересечении
(точки
![]() и
т.д.) вертикалей и горизонталей одного
номера (1 и
и
т.д.) вертикалей и горизонталей одного
номера (1 и
![]() ;
2 и
;
2 и
![]() ,
и т.д.).
,
и т.д.).
Плавная кривая,
проведенная через точки А1,
![]() и есть траектория абсолютного движения
точки А лезвия сегмента. По таким же
траекториям будут двигаться и все
остальные точки сегмента и ножа в целом.
и есть траектория абсолютного движения
точки А лезвия сегмента. По таким же
траекториям будут двигаться и все
остальные точки сегмента и ножа в целом.
По построенной траектории необходимо изготовить лекало, которое потребуется при построении диаграммы отгиба стеблей и высоты стерни.
-
Построение диаграммы отгиба стеблей и высоты стерни отдельного рядка стеблей
При рассмотрении процесса отгиба стеблей сегментно-пальцевыми Р.А. принимают следующие допущения:
- отгиб стебля
клином пальца осуществляется в
![]() направлении к его оси;
направлении к его оси;
все стебли срезаются сегментами только у кромок противорежущих пластин без выскальзывания из раствора режущей пары;
- стебли не проскальзывают по лезвию в процессе их подвода сегментом к противорежущей пластине; траектория подвода стебля совпадает с траекторией абсолютного движения соответствующей области (точки ) лезвия;
- участок стебля от поверхности почвы до режущего аппарата остается прямолинейным при подводе стебля к месту среза (жесткая балка, поворачивающаяся в точке заделки);
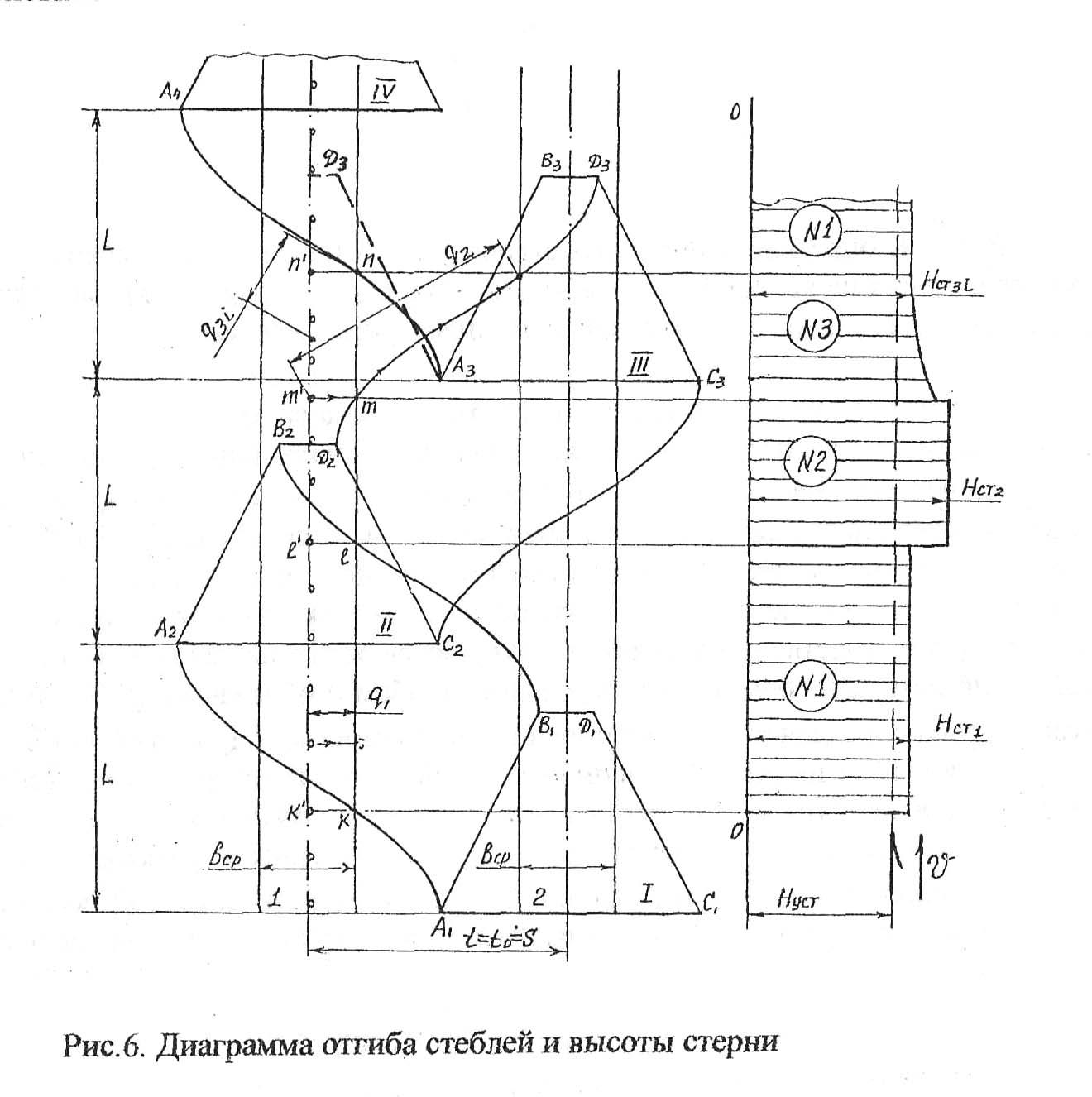
- кромки противорежущих пластин параллельны оси пальца (направлению движения машины) и отстоят друг от друга (рис.6) на расстоянии
![]() ср
=
ср
=
![]() ,
,
![]() равном
средней ширине трапециевидной
противорежущей пластины (см. рис.1б).
равном
средней ширине трапециевидной
противорежущей пластины (см. рис.1б).
а. Режущие аппараты нормального резания с одинарным (t = t0 = S) и некратным (″n″t=″n″t0=S) пробегами ножа
Для анализа отгиба
стеблей и построения диаграммы высоты
стерни для Р.А.
достаточно
рассмотреть участок поля шириной, равной
шагу противорежущей части t0
и длиной 3L.
На свободной части чертежного листа
(рис.6а и 6б) наносим два следа осевых
линий двух соседних пальцев и возле
каждого из них по два следа кромок
противорежущих пластин, отстоящих от
соответствующего следа осевой линии
на расстоянии
![]() ср/2
. Выбрав и указав направление
ср/2
. Выбрав и указав направление![]() (движение машины) проводим четыре
перпендикулярных следам линии, отстоящих
друг от друга на расстоянии L.
На каждой из этих линий вычерчиваем
контуры трапециевидной части сегмента
по два соосно с осевыми следами левого
и правого пальцев (рис 6а) и по два со
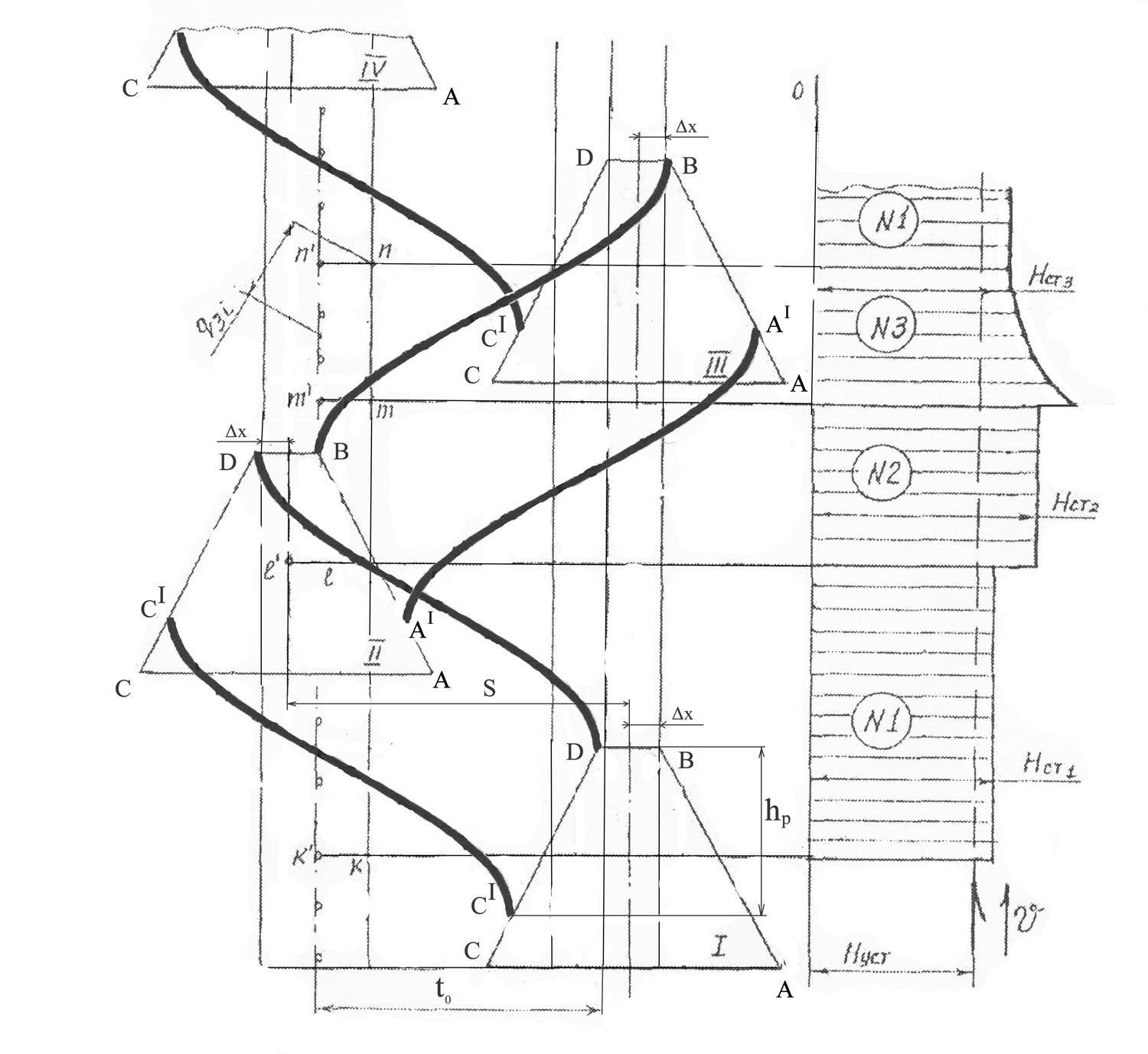
смещением Δх=6 или 4 мм; для Р.А. ″n″t=″n″t0=S
= 88(84)мм.(рис.6б).
(движение машины) проводим четыре
перпендикулярных следам линии, отстоящих
друг от друга на расстоянии L.
На каждой из этих линий вычерчиваем
контуры трапециевидной части сегмента
по два соосно с осевыми следами левого
и правого пальцев (рис 6а) и по два со
смещением Δх=6 или 4 мм; для Р.А. ″n″t=″n″t0=S
= 88(84)мм.(рис.6б).
Выбор места изображения первого контура сегмента (у левого или правого пальца) значения не имеет. Пронумеруем положения сегмента последовательно цифрами I, II, III, IV. На рис. 6а первый и третий контуры расположены по центру правого пальца, а второй и четвертый - по центру левого. Обозначим крайние точки левого лезвия буквами А и В , а левого С и Д с соответствующими положению сегмента индексами. При движении сегмента из положения I в положение II рабочим является лезвие АВ. Все точки лезвия будут двигаться по траекториям эквидистантным кривым А1А2 и В1В2, построенным при помощи лекала, изготовленного по заданию раздела 1.3. Лезвие СД будет рабочим при движении сегмента из крайнего левого (II) в крайнее правое (III) положение. Точки С и Д будут двигаться по траекториям С2С3 и Д2Д3, построенным по тому же лекалу. Аналогично строятся и кривые А3А4 и В3В4. Все построения выполнить в масштабе 1:1.
Если у режущего аппарата рабочая высота сегмента hp < h0 необходимо на обоих лезвиях отметить точки А′ и С′( начало рабочих участков лезвий ) и соединять траекториями не точки ″А1 и А2″и ″ С1 и С2″, а точки ″А′1 и А′2″и ″ С′1 и С′2.″
Справа от диаграммы движения сегмента необходимо оставить свободный участок листа, шириной около 8…10 см. На нем будет изображена диаграмма высоты стерни.
Для анализа отгиба стеблей перед срезом выберем отдельный их рядок,
например, совпадающий со следом осевой линии (точнее расположенный бесконечно близко справа от нее) левого пальца.
Стебли выбранного
рядка начинают отгибаться клином пальца
на правую кромку противорежущей пластины.
Этот отгиб называют малым поперечным
отгибом и обозначают буквой![]() 1.
Поскольку угол наклона кромки к оси
пальца у Р.А. различных типов варьирует
от 1,50
до максимум 70
отгиб клином осуществляется
1.
Поскольку угол наклона кромки к оси
пальца у Р.А. различных типов варьирует
от 1,50
до максимум 70
отгиб клином осуществляется
![]() к оси пальца и его максимальная величина
к оси пальца и его максимальная величина
![]() не превышает половины ширины противорежущей
пластины.
не превышает половины ширины противорежущей
пластины.
6 а
6 б
Рис.6 а, 6 б. Диаграмма отгиба стеблей и высоты стерни
а) Р.А. t=t0=S
б) Р.А. ″n″t=″n″t0=S=88(84)мм.
При движении
сегмента из положения I
в положение II
отклоненные на кромку стебли на участке
рядка к′′
будут срезаться лезвием АВ у правой
кромки 1 пальца начиная в точке К и
заканчивая в точке
. Поскольку у всех стеблей одинаковая
величина отгиба
![]() ,
то и высота стерни на этом участке (№1)
будет постоянной. Ее величину определим
как длину гипотенузы (рис.7) прямоугольного
треугольника с катетами Hуст
и
,
то и высота стерни на этом участке (№1)
будет постоянной. Ее величину определим
как длину гипотенузы (рис.7) прямоугольного
треугольника с катетами Hуст
и
![]() .
.
![]() (5)
(5)

Рис.7. К определению высоты стерни на участке №1: Ок′ - исходное положение стебля на поле; Ок - положение стебля, отклоненного на кромку противорежущей пластины; 1 - противорежущая пластина; 2 - сегмент
Перенесем на ось 0 - 0 точки к′ и ′ и отложим на ординатах от нулевой линии (поверхность почвы) полученную величину Нст1 и соединим прямой линией.
На участке рядка
№2 от точки ′
до точки m′
отклоненные на кромку противорежущей
пластины пальца 1 стебли захватываются
лезвием СД и отгибаются им к левой кромке
противорежущей пластины второго пальца,
где и происходит их срез. Отгиб каждого
стебля осуществляется по траектории
движения элементарного участка (точки)
лезвия, воздействующего на данный
стебель. Такой отгиб называют большим
поперечным отгибом и обозначают![]() .
Величина этого отгиба определяется как
расстояние (по прямой) между точкой
исходного положения стебля на поле и
точкой, в которой произойдет срез этого
стебля у второго пальца. Положение точки
среза указывает точка пересечения линии
следа соответствующей кромки противорежущей
пластины и траектории отгиба стебля.
Поскольку все стебли с участка ′m′
имеют одинаковый отгиб перед срезом,
то после их среза остается одинаковая
по высоте стерня. Ее определим по
зависимости
.
Величина этого отгиба определяется как
расстояние (по прямой) между точкой
исходного положения стебля на поле и
точкой, в которой произойдет срез этого
стебля у второго пальца. Положение точки
среза указывает точка пересечения линии
следа соответствующей кромки противорежущей
пластины и траектории отгиба стебля.
Поскольку все стебли с участка ′m′
имеют одинаковый отгиб перед срезом,
то после их среза остается одинаковая
по высоте стерня. Ее определим по
зависимости
![]() ,
см.
(6)
,
см.
(6)
Перенесем точки ′ и m′ на ось 0-0, отложим на координатах величину Нст2 и, соединив эти точки прямой, получим диаграмму высоты стерни на участке №2.
На третьем участке
рядка (m′
n′)
отклоненные на правую кромку противорежущей
пластины пальца 1 стебли не попадают
под лезвие СД, а либо соскальзывают по
вершине сегмента на уходящее от них
лезвие АВ (растущие вблизи точки
![]() ),
либо попадают на правое лезвие сегмента,
расположенного слева от нанесенного
на чертеже. При крайнем правом положении
ножа все стебли этого участка ряда
окажутся отогнутыми на линию
),
либо попадают на правое лезвие сегмента,
расположенного слева от нанесенного
на чертеже. При крайнем правом положении
ножа все стебли этого участка ряда
окажутся отогнутыми на линию
![]() (положение правого лезвия соседнего
сегмента). Во время обратного хода ножа
они будут соскальзывать по уходящему
лезвию А3Д3/
в угол между лезвиями у точки А3
и по траектории А3А4
подводятся к точке n
где и срезаются начальным участком
лезвия АВ. Поскольку каждый стебель
этого участка рядка расположен на поле
на отличном от других стеблей расстоянии
от точки среза (n),
величина отгиба будет индивидуальной.
Этот вид отгиба, осуществляемого
преимущественно в направлении движения
машины, называют продольным и обозначают
q3i.
Максимальную величину продольного
отгиба (q3max)
,будет иметь стебель, находящийся на
поле в точке m/,
а минимальную (q3min)
равную q1
- стебель с исходным положением в точке
n/.
Высота стерни для любого стебля из этого
участка рядка определяется по зависимости
(положение правого лезвия соседнего
сегмента). Во время обратного хода ножа
они будут соскальзывать по уходящему
лезвию А3Д3/
в угол между лезвиями у точки А3
и по траектории А3А4
подводятся к точке n
где и срезаются начальным участком
лезвия АВ. Поскольку каждый стебель
этого участка рядка расположен на поле
на отличном от других стеблей расстоянии
от точки среза (n),
величина отгиба будет индивидуальной.
Этот вид отгиба, осуществляемого
преимущественно в направлении движения
машины, называют продольным и обозначают
q3i.
Максимальную величину продольного
отгиба (q3max)
,будет иметь стебель, находящийся на
поле в точке m/,
а минимальную (q3min)
равную q1
- стебель с исходным положением в точке
n/.
Высота стерни для любого стебля из этого
участка рядка определяется по зависимости
![]() .
(7)
.
(7)
Для построения диаграммы высоты стерни на участке №3 необходимо определить ее величину не менее чем в 4х точках по длине участка (в начале, конце и двух промежуточных точках). Снеся выбранные по длине рядка точки на линию 0-0, отложив в каждой из них ординату высоты стерни и соединив полученные точки плавной кривой, будем иметь диаграмму высоты стерни на участке №3.
Необходимости в
продолжении диаграммы высоты стерни
после участка №3 нет, так как за ними
начинается участок №1 и т.д. Такая высота
стерни будет сохраняться до тех пор,
пока сохраняется неизменными Ну,
![]() и частота вращения кривошипного вала
n
механизма привода ножа. Для режущих
аппаратов нормального резания с некратным
пробегом ножа “n”t=”n”t0=S=88(84)мм
и ограничении рабочей высоты hp
сегмента построение
диаграммы отгиба стеблей и высоты стерни
рядка растений отличается от рассмотренного
выше следующим (рис.6 б.):
и частота вращения кривошипного вала
n
механизма привода ножа. Для режущих
аппаратов нормального резания с некратным
пробегом ножа “n”t=”n”t0=S=88(84)мм
и ограничении рабочей высоты hp
сегмента построение
диаграммы отгиба стеблей и высоты стерни
рядка растений отличается от рассмотренного
выше следующим (рис.6 б.):
- сегмент в каждом из 4-х положений изображается со смещением от осей пальцев на величину Δх=6мм.(S=88мм.), либо Δх=4мм.(S=84мм.)
- траектории движения проводят через точки В и Д (вершины лезвий) и А′ и С′ (начало рабочей части лезвий).
б. Режущий аппарат нормального резания с двойным пробегом ножа 2t = 2t0 = S
Для рассмотрения процесса отгиба стеблей данным типом режущего аппарата необходимо выделить полоску поля (в направлении движения машины) шириной не менее 3t0 и длиной 3L (рис. 8). На свободной части чертежного листа (формата А1) наносим четыре следа осевых линий четырех соседних пальцев и возле каждого из них по два следа кромок противорежущих пластин.
По аналогии с построением (рис.6) наносим на чертеж контуры двух соседних сегментов в положении I (крайнее правое положение ножа), затем в положении II (крайнее левое положение) со смещением в направлении движения машины на величину подачи (L), III и IV. Обозначим пальцы Р.А. порядковыми номерами 1,2,3,4, начиная с крайнего левого, а начальные и конечные точки лезвий сегментов буквами АВ; СД; СЕ и FG с соответствующими положению сегментов индексами.
При помощи изготовленного лекала провести траектории движения точек лезвия А1А2; В1В2; С1С2 и Е1Е2 (перемещение сегментов из положения I в положение II); С2С3 ,Д2Д3 ,F2F3 и G2G3 (перемещение сегментов из положения II в положение III);А3А4 и С3С4 при движении из III в IV.
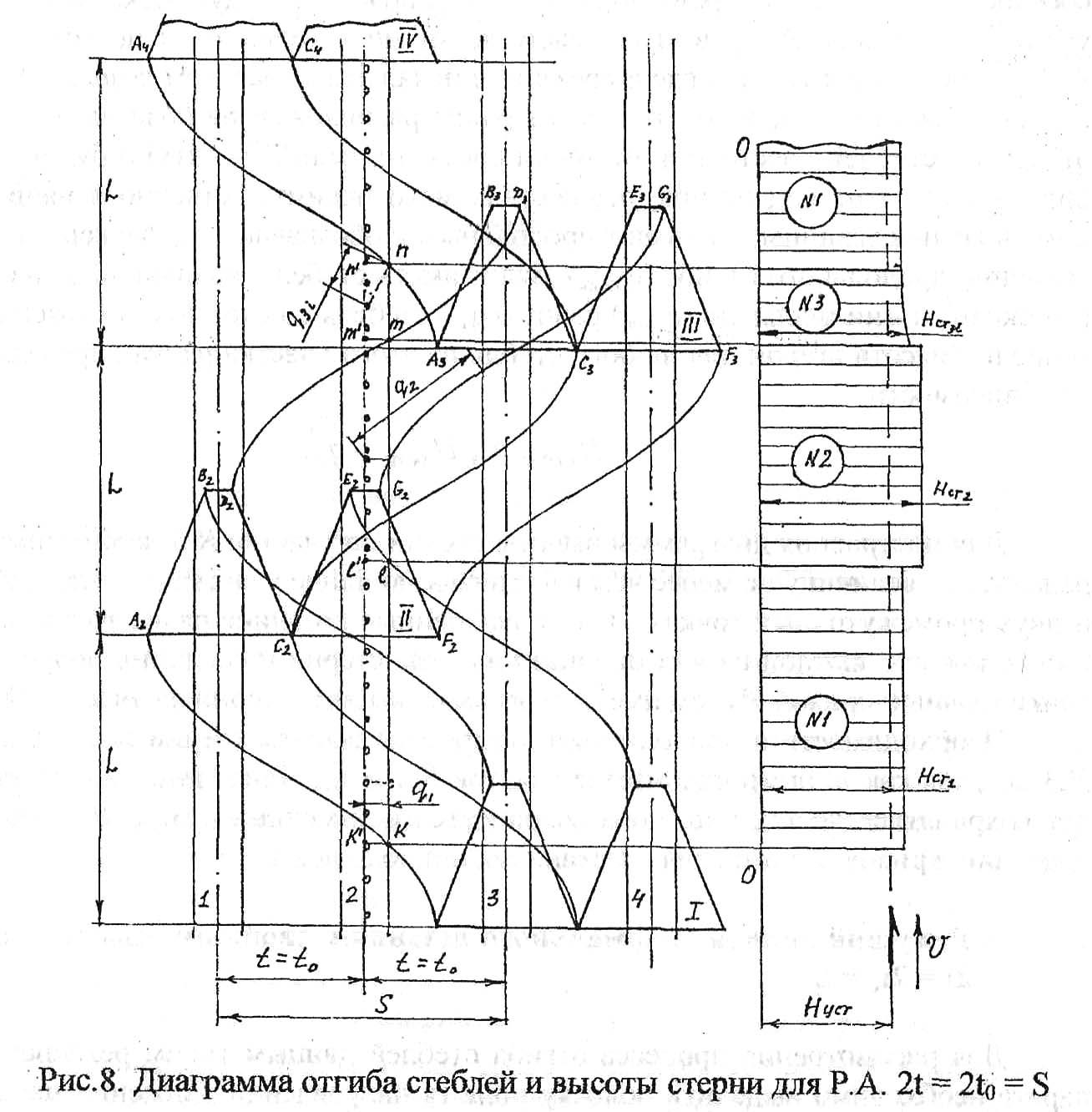
Рис.8. Диаграмма отгиба стеблей и высоты стерни для Р.А. 2t = 2t0 = S
Для анализа отгиба стеблей отдельного рядка его следует располагать между следами осевых линий 2 и 3 пальцев.
Стебли выбранного рядка отгибаются клином второго пальца на правую кромку противорежущей пластины и на участке №1 (от точки к′ до ′) срезаются с отгибом q1 лезвиями АВ и СЕ при перемещении сегментов из положения I в положение II. Высота стерни может быть найдена по выражению (5).
С участка №2 рядка (от точки ′до m′) стебли отгибаются перед срезом сначала клином пальца на правую кромку противорежущей пластины пальца 2, а затем лезвиями FG и СД при движении сегментов из положения II в III к левой кромке противорежущей пластины третьего пальца. Около нее и происходит срез. Все стебли из этого участка рядка будут иметь одинаковые величину отгиба q2 и, естественно, высоту стерни Нст2 , найденную по выражению (6).
Стебли с участка №3 рядка от точки m′ до n′ будут отгибаться в продольном направлении к точке n и срезаться там началом лезвия АВ.
Величина отгиба q3i и высота стерни Hст3i, определяемая по выражению (7), будут индивидуальными для каждого из стеблей этого участка.
По полученным данным построить справа от основного построения диаграмму высоты стерни.
в. Режущий аппарат низкого резания t = 2t0 = S
Для рассмотрения отгиба стеблей режущим аппаратом низкого резания необходимо выделить полоску поля шириной не менее 2t0 и длиной 3L. На свободной части чертежного листа необходимо нанести три следа (рис.9) осевых линий трех соседних пальцев Р.А. и возле каждого из них по два следа кромок противорежущих пластин. По аналогии с построением (см. рис.6) изобразить на чертеже контуры сегмента в положении I, II, III и IV. Обозначим пальцы Р.А. порядковыми номерами 1,2,3, начиная с левого. Крайние точки рабочих частей лезвий сегмента обозначим буквами А′В и С′Д. Положение начальных точек рабочих частей лезвий А′ и С′ найдено на диаграмме скоростей резания (см. рис.3в).