Файл: Г.М. Гринфельд лекции по курсу дискретные системы автоматического управления.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 398
Скачиваний: 0
СОДЕРЖАНИЕ
1.1 Типы квантования непрерывных сигналов.
1.2. Решетчатые функции разностные уравнения.
1.3. Обобщенная структурная схема дискретной системы.
1.4. Простейший импульсный элемент. Формирующий элемент. Фиксатор.
2. Основы теории z-преобразования
2.1. Дискретное преобразование Лапласа. Z-преобразование.
2.2. Основные теоремы z-преобразования.
2.3. Передаточная функция разомкнутой дискретной системы.
2.4. Последовательное соединение звеньев в дискретных сау.
2.5. Передаточная функция замкнутой дискретной системы.
2.6. Обратное z-преобразование.
3. Анализ устойчивости и точности
3.1 Прямой метод оценки устойчивости.
3.2 Критерий устойчивости Шур-Кона.
3.3 Критерий устойчивости, использующий билинейное преобразование.
3.4. Абсолютно устойчивые системы.
3.5. Анализ точности дискретных систем.
4. Частотные характеристики дискретных систем
4.1. Теорема Котельникова-Шеннона.
4.2. Логарифмические частотные характеристики дискретных сау.
5. Определение реакции дискретной сау
5.1. Метод дробного квантования.
5.2. Метод модифицированного z-преобразования.
6. Системы автоматического управления
6.2. Передаточные функции цву, реализующего типовые законы управления.
7. Коррекция цифровых систем управления
7.1. Коррекция дискретных сау с помощью непрерывных регуляторов.
7.2. Коррекция сау с помощью цифровых регуляторов.
7.3. Физическая реализуемость цифровых регуляторов.
7.4. Реализация цифровых регуляторов импульсными фильтрами.
7.5. Реализация цифровых регуляторов на базе цву.
8. Методические указания и вариаты расчетно-графического задания
Каждому из них соответствует одно из
трех слагаемых в выражении
![]() .
Для определения первых двух может быть
использована формула (64).
При этом, вычисляя первое слагаемое
модифицированной решетчатой функции,
.
Для определения первых двух может быть
использована формула (64).
При этом, вычисляя первое слагаемое
модифицированной решетчатой функции,![]() следует считать равным
следует считать равным![]() ,
а при вычислении второго слагаемого
,
а при вычислении второго слагаемого![]() .
Третье слагаемое
.
Третье слагаемое![]() не
имеет нулевого корня, поэтому при
вычислении третьей составляющей
не
имеет нулевого корня, поэтому при
вычислении третьей составляющей![]() полагаем
полагаем![]() ,
но параметр
,
но параметр![]() в (64) заменяем на
в (64) заменяем на![]() .
При вычислении всех трех слагаемых в
выражении
.
При вычислении всех трех слагаемых в
выражении![]() считаем, что
считаем, что
![]() .
.
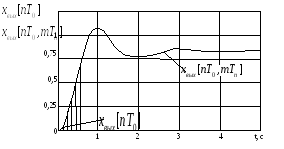
Рис. 55 Графики функций
![]() и
и![]()
нескорректированной дискретной САУ
Для произвольных моментов времени
![]() величина выходного сигнала рассматриваемой
системы равна:
величина выходного сигнала рассматриваемой
системы равна:
![]()
![]()
![]()
Здесь
![]() .
.
На рис. 55 приведены графики функций
![]() и
и![]() .
.
Построение логарифмических амплитудно- и фазочастотных характеристик (ЛАХ и ФЧХ) дискретных систем выполняется в функции абсолютной псевдо частоты
 ,
связанной с частотой
,
связанной с частотой следующей зависимостью:
следующей зависимостью:
![]()
Переход к частотным характеристикам
производится в два этапа. Первоначально
необходимо вычислить передаточную
функцию
![]() ,
для чего в передаточной функции
нескорректированной системы
,
для чего в передаточной функции
нескорректированной системы![]() переменная
переменная![]() полагается равной:
полагается равной:
![]()
Затем в полученном выражении
![]() делается
замена
делается
замена![]() .
.
Построение асимптотической ЛАХ
![]() по виду
по виду![]() производится по тем же правилам, что и
для непрерывных систем. При построении
ФЧХ
производится по тем же правилам, что и
для непрерывных систем. При построении
ФЧХ![]() следует обращать внимание на наличие
неминимально - фазового сомножителя
следует обращать внимание на наличие
неминимально - фазового сомножителя![]() в числители функции
в числители функции![]() .
Определяемая им составляющая
.
Определяемая им составляющая![]() равна:
равна:
![]()
Для рассматриваемой системы:
![]() ;
;
![]()
ЛАХ и ФЧХ нескорректированной разомкнутой системы приведены на рис. 56.
Один из возможных способов коррекции дискретных САУ основывается на использовании аналогового корректирующего звена, включенного последовательно в непрерывную часть системы, как показано на рис. 57. При этом передаточная функция разомкнутой скорректированной системы равна:
![]() (65)
(65)
90
20
0
0
-90
-20
-180
-40
-270
-60 1 400 20 2




























![]()
![]()

![]()
Рис. 56Логарифмические частотные характеристики
нескорректированной дискретной САУ

Рис. 57 Структурная схема дискретной САУ с последовательным
аналоговым корректирующим звеном
Для нахождения передаточной функции
![]() предварительно необходимо определить
желаемую передаточную функцию
предварительно необходимо определить
желаемую передаточную функцию![]() .
С этой целью сначала строится желаемая
ЛАХ разомкнутой скорректированной
системы
.
С этой целью сначала строится желаемая
ЛАХ разомкнутой скорректированной
системы![]() .
Построение
.
Построение![]() осуществляется по методикам, разработанным
для непрерывных САУ, с учетом всех
требований, предъявляемых к дискретной
системе. Для рассматриваемого примера
вид желаемых характеристик
осуществляется по методикам, разработанным
для непрерывных САУ, с учетом всех
требований, предъявляемых к дискретной
системе. Для рассматриваемого примера
вид желаемых характеристик![]() и
и![]() приведен на рис. 58. Частотная характеристика
дискретной САУ с фиксатором обязательно
имеет в числителе сомножитель
приведен на рис. 58. Частотная характеристика
дискретной САУ с фиксатором обязательно
имеет в числителе сомножитель![]() ,
поэтому выбранной желаемой ЛАХ
соответствуют следующие выражения для
,
поэтому выбранной желаемой ЛАХ
соответствуют следующие выражения для![]() и
и![]() :
:
![]() ,
,
![]()
90 20 0 0 -90 -20 -180 -40 -270 -60 20 2 1
Рис. 58Логарифмические частотные характеристики дискретной
САУ с последовательным аналоговым корректирующим звеном
Запас по фазе в скорректированной
системе составляет
![]() .
.
От
![]() осуществляется переход к передаточной
функции
осуществляется переход к передаточной
функции![]() ,
для чего используется подстановка
,
для чего используется подстановка![]() .
Далее, полагая
.
Далее, полагая![]() ,
преобразует передаточную функцию
,
преобразует передаточную функцию![]() к выражению для
к выражению для![]() .
.
Для рассматриваемой системы:
![]() ;
;
![]()
Если передаточная функция
![]() определена, то на основании (65) можно
найти выражение
определена, то на основании (65) можно
найти выражение![]() ,
являющееся
,
являющееся![]() -
изображением функции
-
изображением функции![]() :
:
![]() .
.
Затем следует определить
![]() ,
для чего необходимо выполнить операцию
обратного
,
для чего необходимо выполнить операцию
обратного![]() -
преобразования:
-
преобразования:
![]() (66)
(66)
Проще всего такое преобразование
выполняется, если функция
![]() включена в таблицу
включена в таблицу![]() -
преобразований. В противном случае
можно разложить
-
преобразований. В противном случае
можно разложить![]() на простые слагаемые, для каждого из
которых функция-оригинал находится по
таблице. Другой путь выполнения обратного
на простые слагаемые, для каждого из
которых функция-оригинал находится по
таблице. Другой путь выполнения обратного![]() -
преобразования заключается в следующем:
по
-
преобразования заключается в следующем:
по![]() определяется решетчатая функция
определяется решетчатая функция![]() ,
которая с помощью подстановки
,
которая с помощью подстановки![]() преобразуется в непрерывную функцию
преобразуется в непрерывную функцию![]() ;
затем осуществляется преобразование
Лапласа функции
;
затем осуществляется преобразование
Лапласа функции![]() ,
в результате чего определяется искомое
выражение
,
в результате чего определяется искомое
выражение![]() .
.