Файл: Г.М. Гринфельд лекции по курсу дискретные системы автоматического управления.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 422
Скачиваний: 0
СОДЕРЖАНИЕ
1.1 Типы квантования непрерывных сигналов.
1.2. Решетчатые функции разностные уравнения.
1.3. Обобщенная структурная схема дискретной системы.
1.4. Простейший импульсный элемент. Формирующий элемент. Фиксатор.
2. Основы теории z-преобразования
2.1. Дискретное преобразование Лапласа. Z-преобразование.
2.2. Основные теоремы z-преобразования.
2.3. Передаточная функция разомкнутой дискретной системы.
2.4. Последовательное соединение звеньев в дискретных сау.
2.5. Передаточная функция замкнутой дискретной системы.
2.6. Обратное z-преобразование.
3. Анализ устойчивости и точности
3.1 Прямой метод оценки устойчивости.
3.2 Критерий устойчивости Шур-Кона.
3.3 Критерий устойчивости, использующий билинейное преобразование.
3.4. Абсолютно устойчивые системы.
3.5. Анализ точности дискретных систем.
4. Частотные характеристики дискретных систем
4.1. Теорема Котельникова-Шеннона.
4.2. Логарифмические частотные характеристики дискретных сау.
5. Определение реакции дискретной сау
5.1. Метод дробного квантования.
5.2. Метод модифицированного z-преобразования.
6. Системы автоматического управления
6.2. Передаточные функции цву, реализующего типовые законы управления.
7. Коррекция цифровых систем управления
7.1. Коррекция дискретных сау с помощью непрерывных регуляторов.
7.2. Коррекция сау с помощью цифровых регуляторов.
7.3. Физическая реализуемость цифровых регуляторов.
7.4. Реализация цифровых регуляторов импульсными фильтрами.
7.5. Реализация цифровых регуляторов на базе цву.
8. Методические указания и вариаты расчетно-графического задания
7.5. Реализация цифровых регуляторов на базе цву.
Наиболее универсальным способом построения цифровых регуляторов является использование ЦВУ. При этом передаточная функция регулятора (контроллера) должна быть реализована в виде программы вычислительного устройства. Необходимо учитывать, что простейшие ЦВУ способны выполнять только арифметические операции сложения, вычитания, умножения числа на константу, а также операции запоминания и сдвига. Из (55), (56) следует, что очередное значение выходного сигнала регулятора зависит от очередного и предшествующих значений входного сигнала, а также предшествующих значений выходного сигнала. Предшествующее значение входного и выходного сигналов должны накапливаться в памяти ЦВУ, для чего в его структуре должно быть предусмотрено необходимое число ячеек памяти. Алгоритм работы контроллера должен обеспечивать в каждом такте обновление информации о предыдущих значениях входного и выходного сигналов.
Одна и та же передаточная функция регулятора может быть реализована различными программами. Они будут отличаться друг от друга числом необходимых элементов памяти, количеством вычислительных операций и операций пересылок. Это дает возможность выбрать программу реализации, в наибольшей степени соответствующую используемому ЦВУ.
Известны три основных метода формирования (метода программирования) вычислительного алгоритма (55): непосредственное, последовательное и параллельное программирование.
Непосредственное программирование.
Пусть порядок
числителя и знаменателя передаточной
функции
![]() равны,
т.е.l=k,
тогда ее можно представить в виде:
равны,
т.е.l=k,
тогда ее можно представить в виде:

Введем в рассмотрение фиктивную переменную y(z), равную:
![]()
(60)
тогда
![]() .
Выражение (60) преобразуем к виду:
.
Выражение (60) преобразуем к виду:
![]()
(61)
На основании
(60), (61) можно сформулировать структурную
схему непосредственного программирования
![]() ,
наглядно отражающую вычислительный
алгоритм (рис. 48).
,
наглядно отражающую вычислительный
алгоритм (рис. 48).
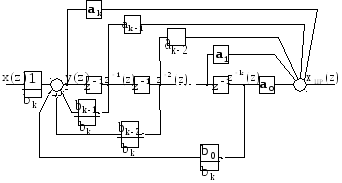
Рис. 48. Структурная схема непосредственного
программирования
![]()
Используя приведенную схему, легко составить разностное уравнение, описывающего работу регулятора:
![]()
![]()
Приведенные
зависимости используются при
программировании контроллера, реализующего
требуемую передаточную функцию
![]() .
.
Пример 33. Необходимо составить структурную схему непосредственного программирования, если:
![]()
Полагаем
![]() ,
тогда:
,
тогда:
![]() .
.
Структурная схема вычислительного процесса, построенная на основании полученных уравнений, приведена на рис. 49.
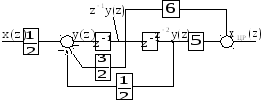
Рис. 49. Структурная схема алгоритма к примеру 33
Последовательное программирование.
Следуя
этому методу, передаточную функцию
![]() необходимо представить в виде произведения
простейших передаточных функций, каждая
из которых реализуется своей программой,
например, с использованием непосредственного
программирования:
необходимо представить в виде произведения
простейших передаточных функций, каждая
из которых реализуется своей программой,
например, с использованием непосредственного
программирования:
![]() .
.
Чаще всего в качестве сомножителей в (62) рассматриваются следующие элементарные передаточные функции:
![]() ;
;![]() ;
;![]() .
.
Пример 34. Необходимо составить структурную схему последовательного программирования, если:
![]() .
.
Представив заданную передаточную функцию в виде:
![]()
легко построить искомую структуру (рис. 50).
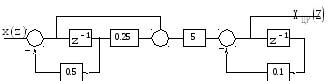
Рис. 50. Структурная схема алгоритма к примеру 34
Параллельное программирование.
При таком
виде программирования передаточная
функция
![]() представляется в виде суммы элементарных
передаточных функций:
представляется в виде суммы элементарных
передаточных функций:
![]() .
.
В зависимости
от вида
![]() передаточные функции
передаточные функции![]() могут иметь, например, следующий вид:
могут иметь, например, следующий вид:
![]()
![]()
![]() ;
;![]() ,
,
где j=1,2,3,…
Пример
35. Необходимо составить структурную
схему параллельного программирования
для
![]() ,
приведенной в предыдущем примере.
,
приведенной в предыдущем примере.
Представим заданную передаточную функцию в виде:
![]()
Соответствующая структурная схема приведена на рис. 51.
Рис. 51. Структурная схема алгоритма к примеру 35
8. Методические указания и вариаты расчетно-графического задания
Целью курсовой работы является закрепление теоретического материала дисциплины “Дискретные системы”. В процессе выполнения работы студенты получают определенные практические навыки расчета дискретных систем, осуществляют выбор наиболее приемлемых методов их анализа и синтеза.
Выбор варианта
На рис. 52-54 приведены структурные схемы нескорректированных дискретных систем автоматического регулирования (САР). Численные значения параметров звеньев, входящих в приведенные системы, указаны в таблице 1.

Рис. 52Структурная схема нескорректированной
дискретной САУ

Рис. 53Структурная схема нескорректированной
дискретной САУ

Рис. 54Структурная схема нескорректированной
дискретной САУ
Таблица 1
Численные значения параметров звеньев нескорректированной САУ
-
Номер
варианта
Структура
схемы
0
Рис. 52
5
1
0,5
1
0,1
1
Рис. 53
2
-
1
-
0,5
2
Рис. 54
5
-
0,6
0,6
0,4
3
Рис. 52
4
5
0,6
1,5
0,2
4
Рис. 53
1
-
0,5
-
0,1
5
Рис. 54
2
-
0,8
0,4
0,2
6
Рис. 52
2
4
0,4
0,5
0,1
7
Рис. 53
5
-
0,5
-
0,2
8
Рис. 54
1
-
2
1
0,4
9
Рис. 52
1
8
0,5
0,4
0,2
10
Рис. 53
10
-
0,2
-
0,1
11
Рис. 54
2
-
0,4
0,2
0,2
12
Рис. 52
4
4
1
0,5
0,5
13
Рис. 53
8
-
0,4
-
0,2
14
Рис. 54
2
-
1
0,6
0,5
15
Рис. 52
4
1
2
5
0,4
16
Рис. 53
12
-
0,4
-
0,2
17
Рис. 54
2
-
0,4
0,2
0,1