ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 22.10.2024
Просмотров: 116
Скачиваний: 0
СОДЕРЖАНИЕ
3. Назначения и разновидности катков, основные параметры, режимы качения.
8. Классификация плужных рабочих поверхностей, их технологические свойства.
10. Условие равновесия навесной почвообрабатывающей машины в вертикальной плоскости.
11. Условие равновесия навесного плуга в горизонтальной плоскости.
13. Характер сопротивления почвы перемещению в ней клина.
14. Развитие поверхности плоского клина в криволинейную поверхность.
15. Классификация цилинроидальных рабочих поверхностей, их технологические свойства.
16. Особенности рабочих поверхностей плужных корпусов для скоростной вспашки.
17. Определение максимальной глубины вспашки.
18. Настройка фрез на заданный режим работы.
19. Объясните, почему с увеличением диаметра катка (колеса) уменьшается его тяговое сопротивление?
20. Настройка картофелесажалки на заданный режим работы: определение максимальной рабочей скорости.
21. Обоснование основных параметров подкапывающего лемеха картофелеуборочных машин.
22. Применение методов математической статистики для оценки качества оценки посева и посадки.
23. Энергетическая оценка машин для разбрасывания удобрений.
28. Распыливающие наконечники опрыскивателей, их типы. Расход рабочей жидкости через распылитель
10. Условие равновесия навесной почвообрабатывающей машины в вертикальной плоскости.
Силы, действующие на плуги, их равновесие. Устойчивый ход плугов и других машин зависит от силового взаимодействия машины с трактором.
Рассмотрим равновесие при работе плуга, приняв следующие условия: плуг движется равномерно и прямолинейно на заданной глубине; силы, действующие на плуг, приняты сосредоточенными в заданных точках и не изменяются по значению и направлению; усилия в нижних тягах CD механизма навески направлены вдоль тяг, которые не ограничены от большого перемещения цепями; распределитель гидросистемы находится в плавающем положении, глубина пахоты задана положением опорных колес плуга Устойчивое равновесие возможно, если многоугольник действующих сил замкнут, а их равнодействующая проходит через мгновенный центр вращения плуга.
Навесной плуг, агрегатируемый с трактором, в процессе работы может поворачиваться в двух плоскостях: в продольно-вертикальной и горизонтальной.
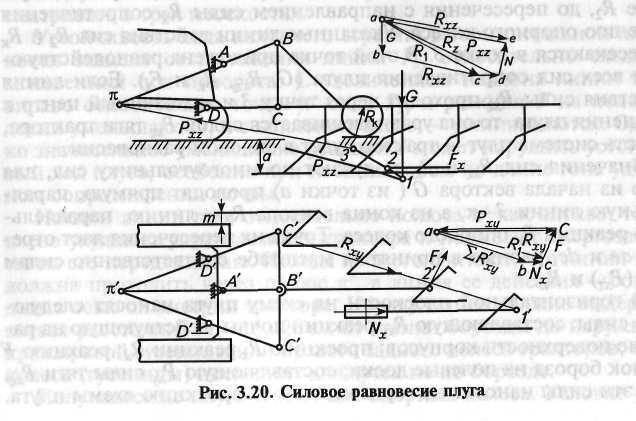
В продольно-вертикальной плоскости XOZ (рис. 3.20) на плуг действуют сила тяжести G, суммарная реакция Rxz почвы на рабочие поверхности корпусов, результирующая сила Fx трения полевых досок о стенки борозд, реакция RK почвы на колесо и сила Pxz тяги трактора.
Силу тяжести G принимают по справочным материалам или рассчитывают по зависимости G = 9,8lmoabn,
где mo - относительная масса плуга, mo = (2,0...3,5)103кг/м2. Меньшие значения mo соответствуют трех- четырехкорпусным навесным плугам, большие — оборотным и прицепным. Линия действия силы тяжести G проходит посредине корпусов.
Значение и направление реакции Rxz находят из соотношения Rz/Rx = 0,18...0,22, а силу Ry - из выражения Ry= (0,25...0,45)Rх, при этом силу Rx определяют по формуле. Из приведенных
соотношений следует, что реакция Rxz наклонена под углом 10... 12° к оси X. В горизонтальной плоскости реакция Rxz с осью X образует угол 15...25°. Точку приложения силы Rxz располагают на расстоянии 1/2 от дна борозды на линии между средними лемехами при четном числе корпусов или у среднего лемеха при нечетном.
Силу Fx трения выражают как произведение коэффициента / (f~ 0,5) и силы Ry, которую определяют из зависимости. Силу Fx располагают посередине ширины полевой доски, направляя ее вдоль оси X.
Линия реакции RK проходит через ось опорного колеса под углом δК к ней, причем tg δК = fП, тд, fП — коэффициент сопротивления перекатыванию колеса. На плотных почвах fП = 0,08...0,10, на рыхлых - fП = 0,12...0,20. Если в машине не одно, а два или три колеса, находят суммарную реакцию на все колеса.
Определив точки приложения и направление линий действия сил G, Rxz и Fx, их наносят в принятом масштабе на проекции схемы плуга, отдельно от схемы строят многоугольник сил.
Вначале находят силу R1 складывая известные по значению и направлению векторы G и Rxz, затем на схеме плуга из точки 1 пересечения линий действия сил G и Rxz проводят прямую, параллельную линии действия равнодействующей R1. Эта прямая пересечет силы Fx трения в точке 2.
На многоугольнике сил из конца вектора R1 откладывают вектор силы Fx (отрезок cd). Сложением векторов R1 и Fx получают равнодействующую R2.
На схеме плуга через точку 2 проводят линию, параллельную силе R2, до пересечения с направлением силы RK сопротивления качению опорного колеса. Указанные линии действия сил R2 и RK пересекаются в точке 3. В этой точке приложена равнодействующая всех сил сопротивления плуга (G, Rxz, RK и Fx). Если линия действия силы Rxz проходит через точку 3 и мгновенный центр π вращения плуга, то она уравновешивается силой Рхz тяги трактора, то есть система плуг - трактор будет в силовом равновесии.
Значения сил Rxz и Pxz получают по многоугольнику сил, для чего из начала вектора G ( из точки а) проводят прямую, параллельную линии 3-π, а из конца вектора R2 - линию, параллельную реакции RK опорного колеса. Точка их пересечения даст отрезок ае и de, равные в принятом масштабе соответственно силам Rx (Pxz) и RK.
11. Условие равновесия навесного плуга в горизонтальной плоскости.
В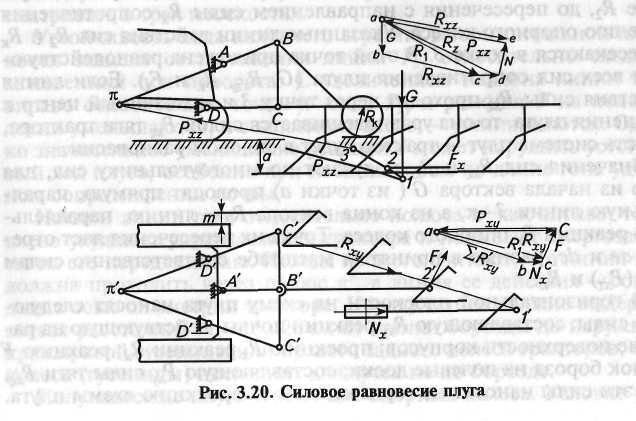 горизонтальной плоскости на схему плуга
наносят следующие силы: составляющуюRxy
реакции почвы, действующую на рабочие
поверхности корпусов; проекцию Rx
реакции RK;
реакцию F
стенок борозд на полевые доски;
составляющую Рxy
силы тяги Pxz.
Все эти силы наносят на горизонтальную
проекцию схемы плуга. Силу Rxy
прикладывают под углом 25...35° к оси Х в
середину ширины захвата плуга. Сила
Rx
- проекция реакции RK,
которую определяют из многоугольника
сил в продольно-вертикальной плоскости.
Реакция F
отклонена
на угол трения от оси Y.
горизонтальной плоскости на схему плуга
наносят следующие силы: составляющуюRxy
реакции почвы, действующую на рабочие
поверхности корпусов; проекцию Rx
реакции RK;
реакцию F
стенок борозд на полевые доски;
составляющую Рxy
силы тяги Pxz.
Все эти силы наносят на горизонтальную
проекцию схемы плуга. Силу Rxy
прикладывают под углом 25...35° к оси Х в
середину ширины захвата плуга. Сила
Rx
- проекция реакции RK,
которую определяют из многоугольника
сил в продольно-вертикальной плоскости.
Реакция F
отклонена
на угол трения от оси Y.
Многоугольник сил в горизонтальной плоскости строят аналогичным способом. Пример построения приведен над горизонтальной проекцией схемы плуга.
Устойчивость хода пахотного агрегата в горизонтальной плоскости зависит от положения линии Rxy относительно следа π' мгновенной оси поворота. С увеличением наклона линии тяги вправо относительно точки π' сила Rxy и реакция F на полевые доски уменьшаются, а с наклоном влево — увеличиваются. Однако значительное уменьшение реакции F может нарушить устойчивый ход плуга, особенно при неодинаковом по длине гона удельном сопротивлении почвы.
Наклон линии тяги относительно полюса π' как вправо, так и влево ухудшает управляемость трактора и повышает энергозатраты на его передвижение. Исходя из этого считают, что линия тяги должна проходить через полюс π', а линия ее действия - совпадать с осью симметрии трактора. Наряду с этим должно выдерживаться расстояние m = 15...20 см от стенки борозды до наружного края правой гусеницы или правого заднего колеса тракторов, если колеса (гусеницы) последних движутся не по борозде.
12. Рациональная формула в. П. Горячкина для определения тягового сопротивления плуга, значение каждого из ее членов. К.П.Д. Плуга и особенности его определения.
Тяговое сопротивление плуга. Горизонтальную составляющую Rx сопротивления плуга при вспашке В. П. Горячкин назвал тяговым сопротивлением и выразил ее трехчленом:
Rx=fПG + kПabn+εabnV2. (3.9) Первое слагаемое - fПG - сопротивление перекатыванию опорных колес плуга и трению о дно и стенку борозды, пропорциональное весу G плуга.
Коэффициент пропорциональности fП назван коэффициентом сопротивления протаскиванию. Силу fПG определяют протаскиванием плуга в открытой борозде. Значение коэффициента fП, зависит от типа почв, их агрофона, конструкции плугов и находится в пределах 0,4... 1,0. Второе слагаемое - kПabn - вызвано сопротивлением подрезанию, разрушению и укладыванию пласта в борозду. Действие этой составляющей общего сопротивления считается полезным.
Коэффициент kП оценивает удельное сопротивление почвы, определяемое из соотношения
kП=RX / abn, где RX - горизонтальная составляющая силы сопротивления почвы при вспашке плугом; а — глубина вспашки; b — ширина захвата корпуса; n — число корпусов. Силу RX находят при динамометрировании (осциллографировании) без учета первого и третьего слагаемых формулы (3.9).
Величина kП зависит от типа почв и степени их освоенности. Так, для глинистых и дерново-подзолистых почв значение kП в 2,3...2,6 раза больше, чем для легкосуглинистых и супесчаных. При вспашке после уборки зерновых значение kП на 10...20 % меньше в сравнении с обработкой травяного пласта. Третье слагаемое - εabnV2 - скоростное сопротивление, зависящее от кинематической энергии, сообщаемой почвенным пластом. Эта составляющая не оказывает существенного влияния на полезное деформирование почвы. Коэффициент ε скоростного сопротивления зависит от типа почв, геометрических форм рабочих поверхностей плужных корпусов. При скоростях вспашки до 5 км/ч коэффициент ε незначительно (2...3 %) изменяет общую силу RX. С увеличением скорости движения до 12 км/ч сопротивление плугов с традиционными корпусами существенно возрастает. Для пахоты на скоростях 12... 15 км/ч применяют скоростные рабочие поверхности плужных корпусов, в которых уменьшено значение коэффициента ε. Формула (3.9) выражает физическую сущность взаимодействия плуга с почвой, но определение силы RX и ее составляющих требует многочисленных трудоемких экспериментов, поэтому в практических расчетах широко применяют упрощенное выражение для тягового сопротивления плуга Rx= kabn, где k — удельное сопротивление плуга. Значение k рассчитывают по формуле: k = Rx/abn, замерив среднее тяговое сопротивление Rx, глубину а пахоты и ширину bn захвата плуга. Коэффициент k отражает все три составляющие тягового сопротивления плуга, входящие в выражение (3.9). На величину k влияют технологические свойства почвы, конструктивные параметры плуга и скорость его движения. В зависимости от коэффициента k почвы разделяют на легкие - k < 30 кН/м2, средние - 30...50, среднетяжелые - 50...70, тяжелые - 70...120 и очень тяжелые - k > 120 кН/м2
Коэффициент полезного действия плуга. Исходя из энергетических соотношений Е"п (энергоемкость обработки почвы) и Е"пл (энергия, затраченная плугом на обработку почвы), выразим КПД плуга в следующем виде:
ηп=Е"п/ Е"пл, или ηп=kп/ k, т. е. коэффициент полезного действия плугов равен соотношению удельных сопротивлений почвы и плуга. КПД навесных и полунавесных плугов ηп =0,72...0,78, прицепных - ηп = 0,65...0,70. Оборотные и поворотные плуги имеют ηп = 0,62...0,65.
Затупленные лезвия лемехов уменьшают ηп, КПД плугов с новыми лемехами достигает 0,8. Отклонение рамы плуга от горизонтальной плоскости как в поперечном, так и в продольном направлениях снижают ηп. При расчетах принимают ηп = 0,7.