ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 22.10.2024
Просмотров: 117
Скачиваний: 0
СОДЕРЖАНИЕ
3. Назначения и разновидности катков, основные параметры, режимы качения.
8. Классификация плужных рабочих поверхностей, их технологические свойства.
10. Условие равновесия навесной почвообрабатывающей машины в вертикальной плоскости.
11. Условие равновесия навесного плуга в горизонтальной плоскости.
13. Характер сопротивления почвы перемещению в ней клина.
14. Развитие поверхности плоского клина в криволинейную поверхность.
15. Классификация цилинроидальных рабочих поверхностей, их технологические свойства.
16. Особенности рабочих поверхностей плужных корпусов для скоростной вспашки.
17. Определение максимальной глубины вспашки.
18. Настройка фрез на заданный режим работы.
19. Объясните, почему с увеличением диаметра катка (колеса) уменьшается его тяговое сопротивление?
20. Настройка картофелесажалки на заданный режим работы: определение максимальной рабочей скорости.
21. Обоснование основных параметров подкапывающего лемеха картофелеуборочных машин.
22. Применение методов математической статистики для оценки качества оценки посева и посадки.
23. Энергетическая оценка машин для разбрасывания удобрений.
28. Распыливающие наконечники опрыскивателей, их типы. Расход рабочей жидкости через распылитель
13. Характер сопротивления почвы перемещению в ней клина.
Т яговое
сопротивление машин определяют
динамометрированием. Динамографы
записывают изменение тягового
сопротивления по пути перемещения или
во времени.
яговое
сопротивление машин определяют
динамометрированием. Динамографы
записывают изменение тягового
сопротивления по пути перемещения или
во времени.
Характерная особенность динамограмм (рис. 76) почвообрабатывающих машин - большая изменчивость тяговых сопротивлений, вызываемая колебанием значений параметров, характеризующих физико-механические свойства почвы, неровностями микрорельефа и рядом других факторов.
Для оценки динамики тяговых усилий используют степень неравномерности δн, рассчитываемую по выражению:
δн = (RXmax – RXmin)/ RXср
Однако степень неравномерности тягового сопротивления не выявляет скорость его изменения. Профессор Ю.К.Киртбая рекомендует изменчивость тягового сопротивления оценивать показателем в, который можно получить из выражения:
Θ = (RXmax – RXср)/ Ti2 =2ΔRX / Ti
где 2ΔRX - размах колебания тягового сопротивления, H; Ti - период колебания, м.
14. Развитие поверхности плоского клина в криволинейную поверхность.
Действие на почву рабочих органов почвообрабатывающих машин можно представить как воздействие на нее клина.
Различают плоский и криволинейный клин, т. е. рабочие поверхности которых соответственно плоскость или криволинейная поверхность.
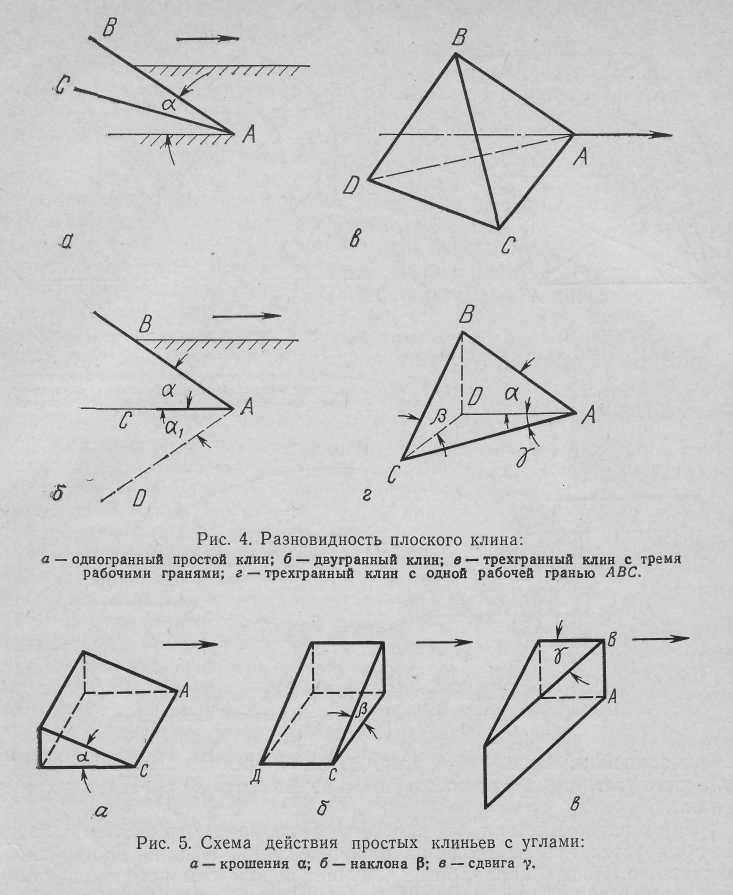
Плоский клин. В зависимости от количества рабочих плоскостей (граней) плоский клин бывает одно-, дву- и трехгранный.
В одногранном, или простом, клине (рис. 4, а) рабочей гранью является плоскость АВ, установленная под углом а к горизонту. Другая плоскость АС - нерабочая и действия на почву не оказывает.
Д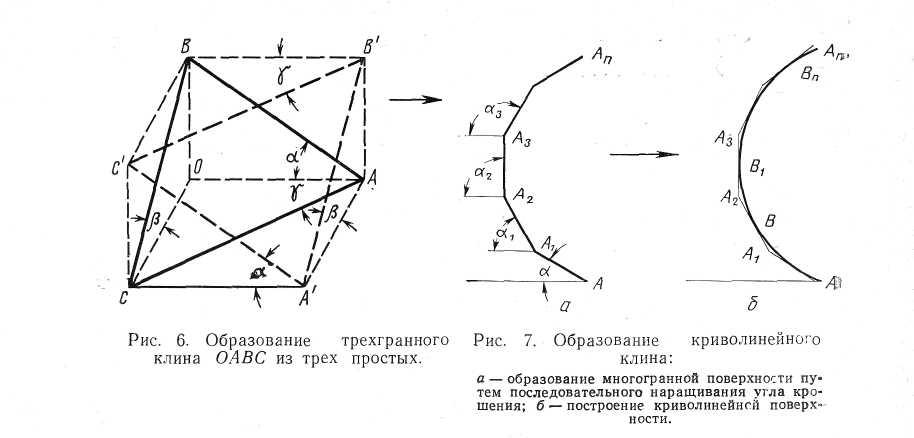 вугранный
клин BAD (рис. 4, б) имеет две рабочие грани
АВ и AD. Этот клин может рассматриваться
как совокупность двух простых клиньев,
у которых рабочие грани установлены
под углами а и си к горизонту. Приα1
= 0 грань AD совпадает с гранью АС, которая
является опорной плоскостью клина
ВАС.
вугранный
клин BAD (рис. 4, б) имеет две рабочие грани
АВ и AD. Этот клин может рассматриваться
как совокупность двух простых клиньев,
у которых рабочие грани установлены
под углами а и си к горизонту. Приα1
= 0 грань AD совпадает с гранью АС, которая
является опорной плоскостью клина
ВАС.
Трехгранный клин представляет собой тетраэдр ABCD (рис. 4, б). В общем виде он имеет три рабочие грани ABC, ABD и ACD. B частном случае рабочей гранью служит лишь одна ABC (рис. 4, г), а грани ABD и ADC могут быть опорными плоскостями. Для указанного случая необходимо условие, чтобы одно из ребер, например AD, совпадало с направлением движения. Этот же клин можно представить как косо поставленный простой. Поэтому трехгранный клин часто носит название косого клина. Он характеризуется тремя углами α, β и γ.
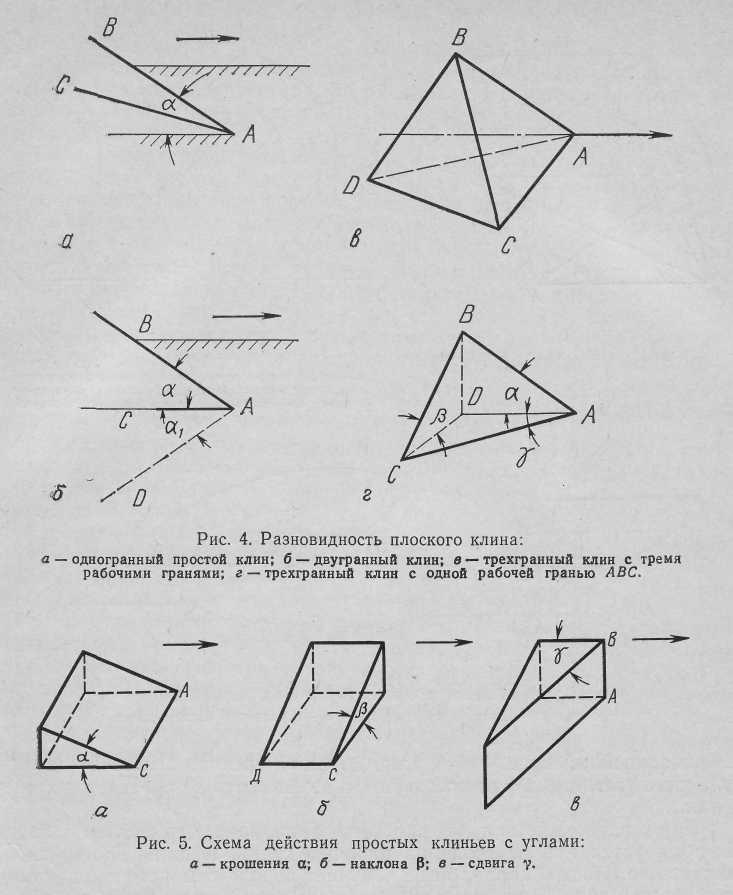
Рассмотрим значение каждого угла на примере простого клина (рис. 5).
У клина с углом α (рис. 5, а) ребро АС установлено перпендикулярно направлению движения, оно подрезает пласт почвы в горизонтальной плоскости, а рабочая грань поднимает его на себя. Пласт почвы изгибается и при недостаточной связности крошится.
Нижнее ребро CD клина с углом β (рис. 5, б) совпадает с направлением движения, его рабочая плоскость наклоняет пласт в направлении, перпендикулярном движению, что способствует оборачиванию пласта.
У клина с углом γ (Рис- 5, в) ребро АВ перпендикулярно горизонтальной плоскости. Пласт почвы под воздействием рабочей плоскости этого клина сдвигается в сторону. Таким образом, в зависимости от положения рабочей грани простого клина по отношению к горизонтальной плоскости и направлению движения, характеризуемое углами α, β и γ получаем различное действие клина на почву.
Воздействие на почву трехгранного клина можно представить как действие трех простых клиньев с углами α, β и γ.
Построим клин ОВАА'СС (рис. 6) с углом α, обеспечивающий подрезание и подъем пласта. На сторонах OB, OA и ОС построим клин ОВСА'АВ' с углом β, наклоняющий пласт вбок. И наконец, по тем же сторонам построим клин ОАСС'ВВ' с углом γ, сдвигающий пласт в сторону. Соединив точки А, В и С сплошными линиями, получим трехгранный клин ОАВС с теми же углами α, β и γ.
Таким образом, при движении трехгранного клина пласт подрезается, поворачивается и сдвигается в сторону, так же как и при последовательном воздействии трех простых клиньев.
Криволинейный клин. Такой клин более интенсивно действует на почву. У него углы α, β и γ не постоянны, а изменяются в определенных пределах.
При воздействии на почву плоского клина, например с углом а, пласт деформируется при переходе на рабочую грань. В дальнейшем, перемещаясь по плоской грани, он не получает дополнительного воздействия со стороны клина. Для более интенсивного воздействия клина на пласт необходимо на пути его перемещения по клину с гранью АА1 и углом α (рис. 7, а) поставить новый клин, у которого рабочая грань А1А2 поставлена под углом α1 большим, чем α, затем — клин с гранью А2 А3 и углом углом α2 большим, чем α1, и т. д. Многократное последовательное наращивание начального клина приведет к образованию многогранной поверхности AA1A2A...An. Для непрерывного деформирования пласта при движении по поверхности клина нужно воспользоваться криволинейной поверхностью АВ1В2...Вп, вписанной в многогранник AA1A2A...An (рис. 7, б). Так образуется криволинейный клин.
У криволинейного трехгранного клина углы α, β и γ должны непрерывно изменяться. Деформирующие свойства криволинейной поверхности зависят от характера изменения указанных углов. Так,, например, крошащая способность криволинейной поверхности растет с увеличением углов α и γ.
Рабочие органы почвообрабатывающих машин бывают с плоскими, цилиндрическими, цилиндроидальными и винтовыми поверхностями..
15. Классификация цилинроидальных рабочих поверхностей, их технологические свойства.
По геометрическим параметрам и формам рабочие поверхности разделяют на цилиндроидальные и винтовые.
В цилиндроидальной поверхности угол γ изменяется от γ0 до γmax по зависимостям, приведенным на рис. 3.5, г, д.
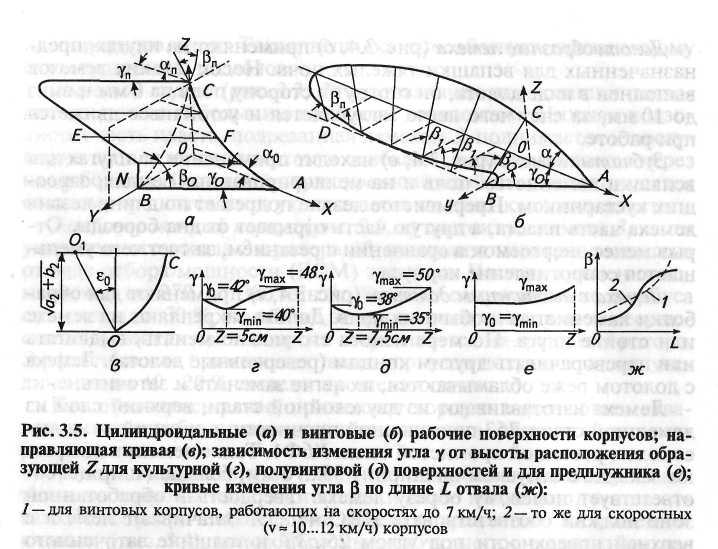 Культурные
отвалы от полувинтовых различаются
также видом зависимости y=f(Z).
От лезвия лемеха до его стыка с отвалом
угол у сначала уменьшается от γ0
до γmin
на 2...3º, что облегчает подъем пласта на
грудь отвала и устраняет задирания
почвы бороздным обрезом. После линии
стыка угол γ
у культурных отвалов возрастает по
выпуклой кривой, а у полувинтовых — по
вогнутой. При такой закономерности
культурные отвалы имеют лучшую крошащую
способность и при малой кривизне рабочие
поверхности меньше залипают.
Интенсивное (от 35 до 50°) нарастание угла
γ
у полувинтовых отвалов способствует
большему обороту пласта крылом отвалов.
Культурные
отвалы от полувинтовых различаются
также видом зависимости y=f(Z).
От лезвия лемеха до его стыка с отвалом
угол у сначала уменьшается от γ0
до γmin
на 2...3º, что облегчает подъем пласта на
грудь отвала и устраняет задирания
почвы бороздным обрезом. После линии
стыка угол γ
у культурных отвалов возрастает по
выпуклой кривой, а у полувинтовых — по
вогнутой. При такой закономерности
культурные отвалы имеют лучшую крошащую
способность и при малой кривизне рабочие
поверхности меньше залипают.
Интенсивное (от 35 до 50°) нарастание угла
γ
у полувинтовых отвалов способствует
большему обороту пласта крылом отвалов.
Δγ = γmax - γ0 - полувинтовая поверхность (Δγ=7…12º), культурная поверхность (Δγ=0…7º).
16. Особенности рабочих поверхностей плужных корпусов для скоростной вспашки.
При работе на повышенных скоростях (9... 12 км/ч) наблюдается фонтанирование почвы на отвале, повышаются затраты энергии на вспашку. Полувинтовыми корпусами пласты разбрасываются и беспорядочно укладываются. Для пахоты со скоростями 9...12 км/ч разработаны рабочие поверхности, у которых разница углов Δγ = γ0 – γmin=7° (у обычных - 1...3º), а угол α0 = 23...25° (у обычных - 30...32º). Скоростные корпуса с такими параметрами обеспечивают качественную обработку почвы, энергозатраты возрастают незначительно.
____________________________________________________________________________________________________________
17. Определение максимальной глубины вспашки.
Оборот пласта. При вспашке с оборотом почвенного пласта заделываются дернина, растительные остатки, сорняки, органические и минеральные удобрения.
Рассмотрим схему оборота пласта, принимая, что его размеры (толщина а и ширина Ь) не изменяются. Пусть в исходном положении пласт представляет прямоугольник ABCD (рис. 3.6, а) со сторонами а и Ь. Вначале пласт поворачивается относительно ребра А, затем, приняв вертикальное положение АВ1С1D1, перемещается вокруг ребра D1 до D1A2B2C2, при котором он ляжет на ранее отваленные пласты.
Из схемы видно, что прямоугольные треугольники A2’D1D2’ и С2’D2’Е равны между собой, так как гипотенузы D1D2’=C2’D2’, а углы δ одинаковы. Следовательно, если C2’E=A2’D2’, а A2’D2’=а, то и C2’E = а, т.е.точки стыков С2 и C2’ пластов от дна борозды будут на высоте, равной глубине пахоты
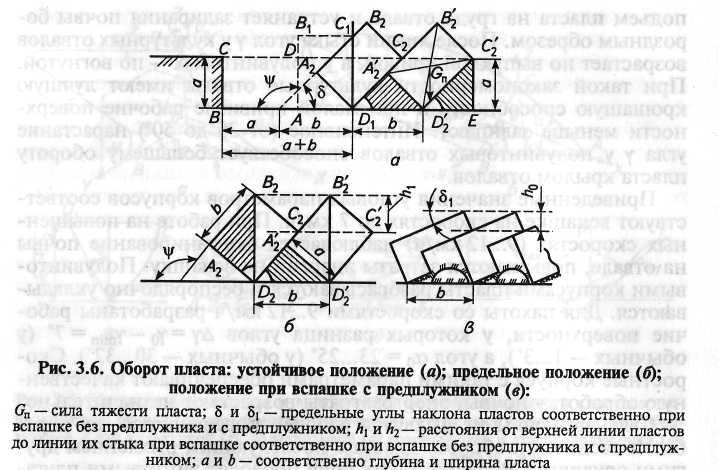
Уложенные пласты займут устойчивое положение, если линия действия силы GП тяжести пласта (рис. 3.6, а) пересечет дно борозды правее точки D2’. Предельное положение (неустойчивое положение) будет таким, при котором диагонали D2B2 и D2’B2’ располагаются вертикально. Тогда из подобия прямоугольных треугольников A2B2D2 и A2’B2’D2’ имеем, что D2B2/ A2B2= D2D2’/A2’D2’ или (b/a=(a2+b2)1/2)1/2. Обозначив b/а =k, получим биквадратное уравнение k4-k2-l=0.
Решив уравнение, найдем kпр=1,27. Устойчивое положение будет при b/а > 1,27, а максимальная глубина пахоты аmax ≤ b / kпр = b/1,27 =0,8b.