ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 28.07.2024
Просмотров: 582
Скачиваний: 0
СОДЕРЖАНИЕ
Правила оформления отчета по лабораторным работам
Лабораторная работа № 1 Привод исполнительного механизма
Лабораторная работа № 2 Зубчатый цилиндрический редуктор
Основные геометрические параметры цилиндрического зацепления
Лабораторная работа № 3 Зубчатый конический редуктор
Основные кинематические и геометрические параметры конического зацепления
Лабораторная работа № 4 Червячный редуктор
Основные кинематические и геометрические параметры
Основные кинематические и геометрические параметры коробки передач
Лабораторная работа № 6 Автомобильная коробка передач
Основные кинематические и геометрические параметры коробки передач
Лабораторная работа № 7 Подшипники качения
Лабораторная работа № 9 Определение коэффициента трения в подшипнике скольжения
Обработка результатов испытания
Лабораторная работа № 10 Определение коэффициентов трения в резьбе и на торце гайки
Список использованных источников
Форма титульного листа отчета по лабораторным работам
Приложение 2 Форма первого листа к лабораторной работе Лабораторная работа № _____
Назначить по
справочному материалу [1, табл. 2П] марку
двигателя с мощностью Nдв,
округляя значение
![]() в большую сторону для исключения
перегрузки электродвигателя. Затем
уточнить значение номинальной частоты
вращения вала двигателя
в большую сторону для исключения
перегрузки электродвигателя. Затем
уточнить значение номинальной частоты
вращения вала двигателя![]() ,
мин-1.
,
мин-1.
7. Определить основные параметры на каждом валу привода для выбранного электродвигателя:
– мощность Nj, кВт;
– частота вращения nj, мин-1;
– крутящий момент на каждом валу Тj, Нм.
Результаты расчета оформить в виде таблицы
Таблица 1.2
Техническая характеристика привода
|
Техническая характеристика |
Обозначение |
Значение |
|
Мощность на приводном валу, кВт |
Nприв |
|
|
частота вращения приводного вала, мин-1 |
nприв |
|
|
Общее передаточное отношение привода |
iобщ |
|
Окончание табл. 1.2
|
Техническая характеристика |
Обозначение |
Значение |
|
Передаточное отношение редуктора |
|
|
|
Мощность электродвигателя, кВт |
|
|
|
Номинальная частота вращения вала электродвигателя, мин-1 |
|
|
9. Подобрать муфту упругую по передаваемому крутящему моменту и диаметру соединяемых валов; записать следующие предельно допустимые значения:
nпред – частота вращения;
![]() –продольное
(осевое) смещение;
–продольное
(осевое) смещение;
![]() –радиальное
смещение;
–радиальное
смещение;
![]() –угловое смещение.
–угловое смещение.
Примечание: муфта задается преподавателем (муфта с резиновой звездочкой; муфта упругая втулочно-пальцевая; муфта с упругой оболочкой; муфта с цилиндрическими пружинами).
10. Вычертить конструкцию назначенной муфты упругой с указанием основных геометрических параметров и упругого элемента.
11. Для привода
изображенного на рис. 1.2 определить
несоосность валов соединяемых муфтой
упругой 2.
Для чего измерить радиальную
![]() ,
осевую
,
осевую![]() и
угловую
и
угловую![]() несоосности валов электродвигателя и
редуктора, руководствуясь рис. 1.3.
несоосности валов электродвигателя и
редуктора, руководствуясь рис. 1.3.
Вывод к лабораторной работе.
Контрольные вопросы
Что называется приводом?
Какие бывают виды приводов?
Что такое несоосность валов?
Как определяется КПД привода?
Как определяется общее передаточное отношение привода?
Как изменяется значение крутящего момента от электродвигателя к приводному валу исполнительного механизма?
Какие существуют несоосности валов?
Лабораторная работа № 2 Зубчатый цилиндрический редуктор
Цель работы: изучение конструкции типового зубчатого цилиндрического редуктора, знакомство с компоновкой узлов и назначением отдельных деталей, приобретение навыков по разборке, сборке и регулировке редуктора.
Задание: 1) выполнить классификацию заданного редуктора;
2) определить основные параметры зацепления и зубчатых колес одной ступени редуктора;
3) измерить и указать на эскизе цилиндрического редуктора габаритные, присоединительные и установочные размеры.
Теоретическое введение
а
б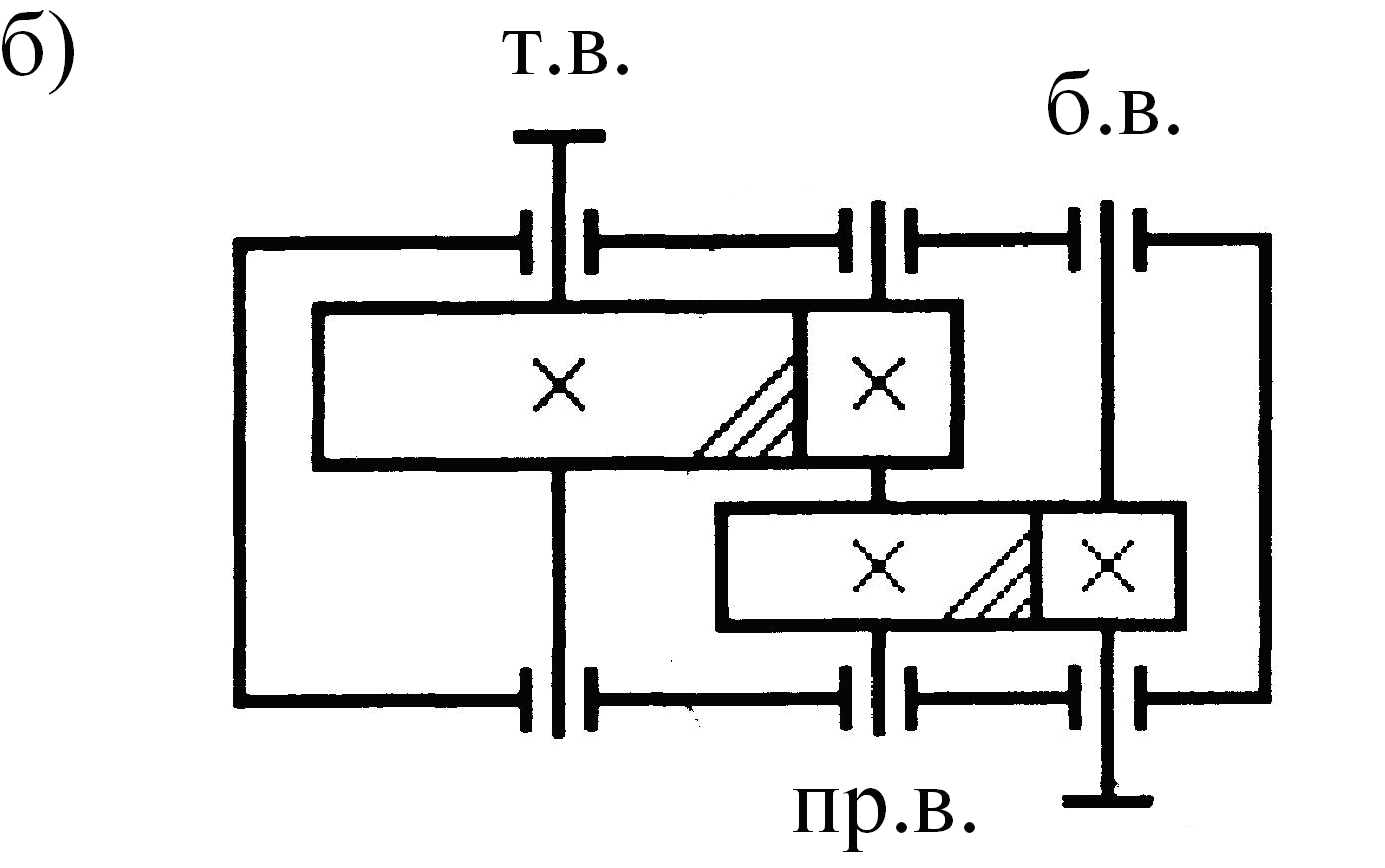
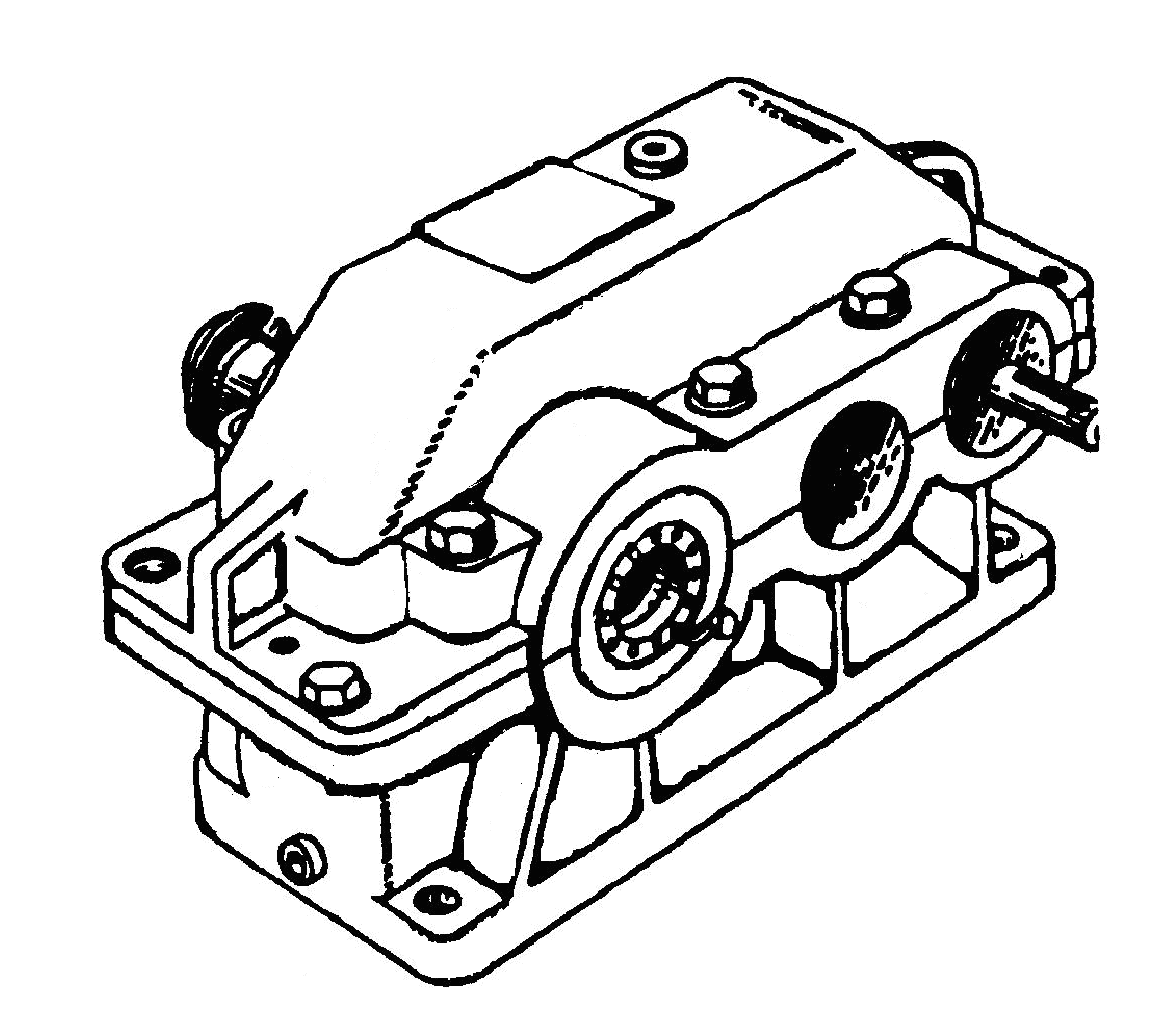
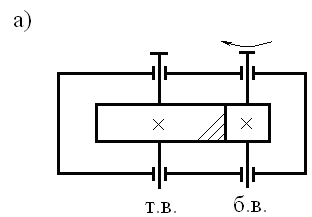
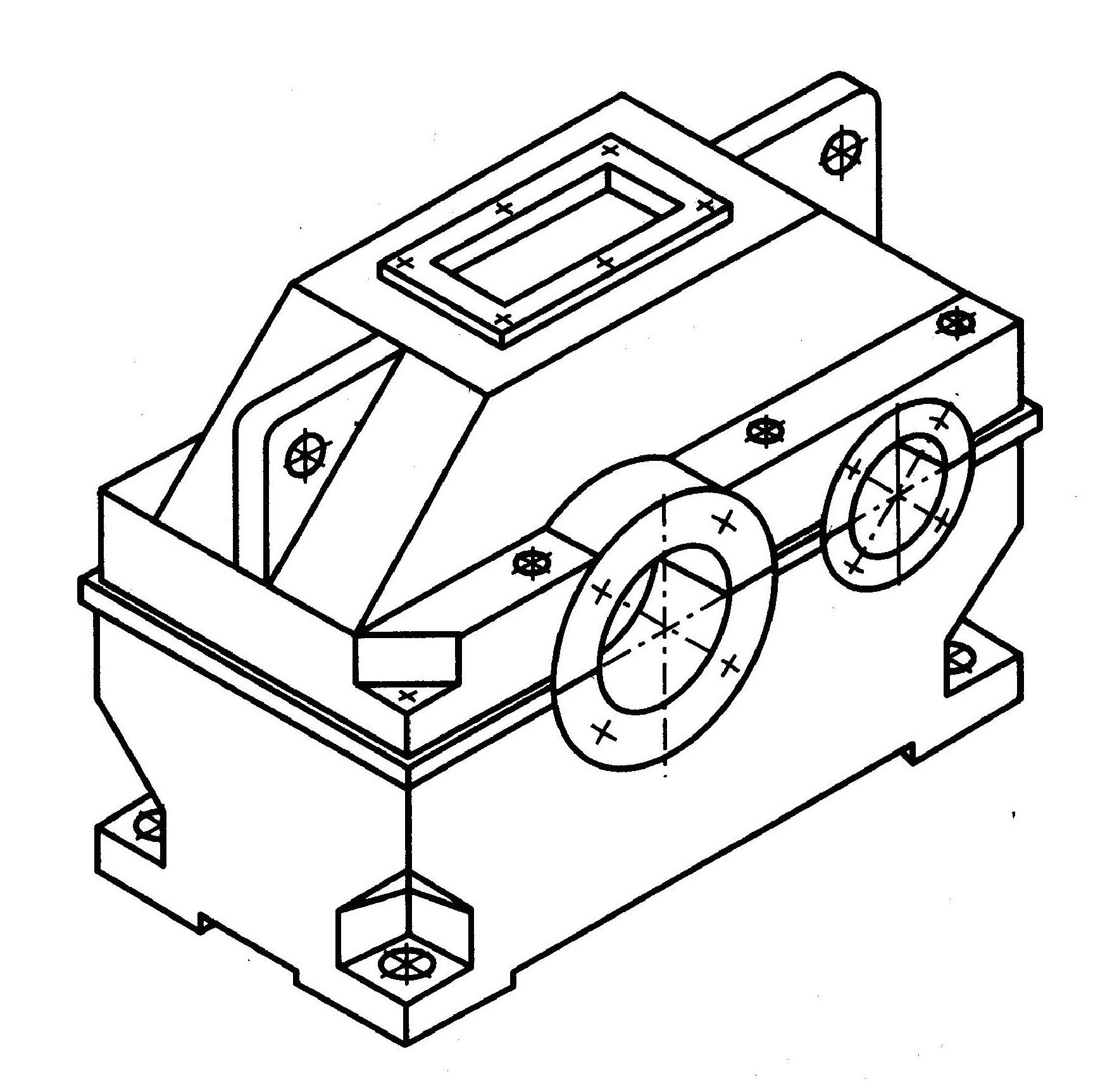
Рис. 2.1. Цилиндрические зубчатые редукторы
Редуктор – это устройство, предназначенное для понижения частоты вращения и увеличения крутящего момента. Изменение частоты вращения n характеризуется передаточным отношением i = n1/n2.
На рис. 2.1 показаны одноступенчатый (рис. 2.1, а) и двухступенчатый (рис. 2.1, б) цилиндрические зубчатые редукторы с указанием соответствующих кинематических схем. Для редуктора передаточное отношение определяют как соотношение ведущих и ведомых валов iред = nб.в./nт.в.. Если редуктор двухступенчатый, то передаточное отношение можно определить как произведение передаточных чисел двух ступеней по формуле iред = uб uт, где uб, uт – передаточные числа для соответствующей зубчатой цилиндрической передачи, которые определяются как отношение числа зубьев: u = z2/z1. Значения передаточного числа согласовывают по ГОСТ 2185-66:
1-й ряд 1; 1,25; 1,6; 2; 2,5; 3,15; 4; 5; 6,3; 8; 10; 12,5;
2-й ряд 1,12; 1,4; 1,8; 2,24; 2,8; 3,55; 4,5; 5,6; 7,1; 9; 11,2.
Понятия и термины, относящиеся к геометрии зубчатых передач, стандартизованы. Параметрам шестерни присваивают индекс 1, а параметрам колеса индекс 2. Различают следующие индексы: w – начальная поверхность или окружность; b – основная поверхность или окружность; а – поверхность или окружность вершин и головок зубьев; f – поверхность или окружность впадин и ножек зубьев. Параметрам, относящимся к делительной поверхности или окружности, дополнительного индекса не присваивают. Геометрия цилиндрического зубчатого зацепления отображена на рис. 2.2. Здесь αw – угол зацепления, где α = 20º – угол профиля исходного контура по ГОСТ 13755-81; аw – начальное межосевое расстояние; р – делительный окружной шаг зубьев; П – полюс зацепления; gα – длина активной линии зацепления; h – высота зуба. Линия зацепления является касательной к основным окружностям шестерни и колеса. Если передача без смещения, то выполняются следующие равенства: аw = а, dw = d.
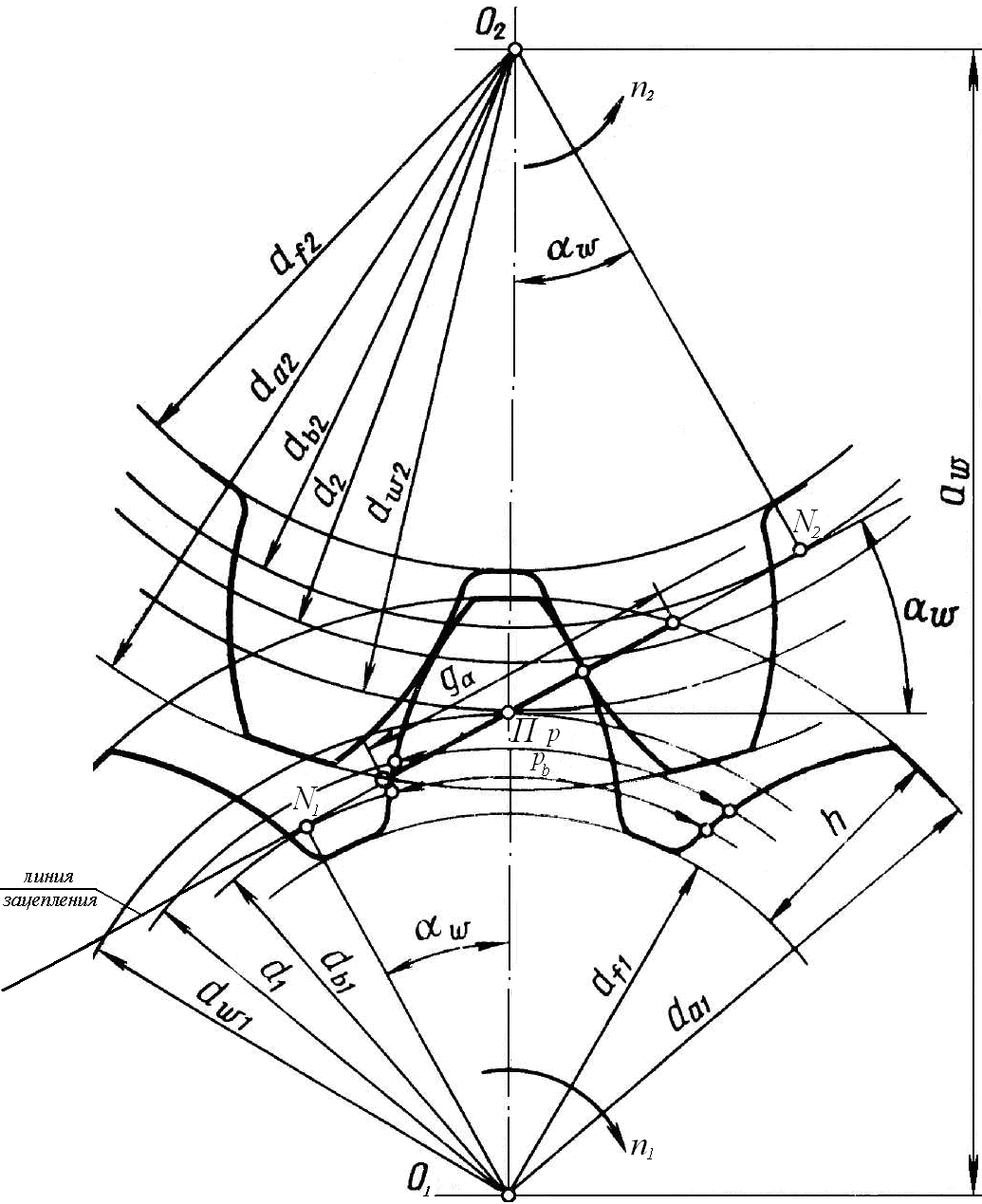
Рис. 2.2. Зацепление цилиндрической передачи
Основная
характеристика размеров зубьев –
окружной модуль, определяемый по формуле
![]() ,
мм. Значения модулей стандартизованы
ГОСТ 9653-60:
,
мм. Значения модулей стандартизованы
ГОСТ 9653-60:
1-й ряд 1; 1,25; 1,5; 2; 2,5; 3; 4; 5; 6; 8; 10;
2-й ряд 1,125; 1,375; 1,75; 2,25; 2,75; 3,5; 4,5; 5,5; 7; 9; 11,25.
В отличие от прямых косые зубья входят в зацепление не сразу по всей длине, а постепенно. На рис. 2.3 изображено поле косозубого цилиндрического зацепления. Зубья нагружаются по мере захода их в поле зацепления, а в зацеплении всегда находится минимум две пары. Плавность работы косозубого зацепления значительно снижает шум и дополнительные нагрузки.
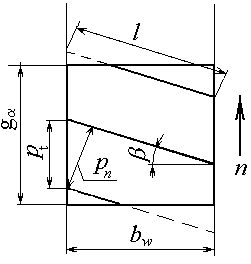
Рис. 2.3. Поле косозубого зацепления: l – длина зуба; bw – рабочая ширина зубчатого венца; рt – окружной шаг; β – угол наклона зубьев
Профиль косого зуба в нормальном сечении совпадает с профилем прямого зуба и модуль в этом сечении должен быть стандартизован. В торцевом сечении параметры косого зуба изменяются в зависимости от угла β: pt = pn /cos β. Индексы n и t относят к параметрам в нормальном и торцевом сечениях соответственно.