Файл: Учебное пособие для студентов очной и заочной форм обучения Рекомендовано учебнометодическим объединением вузов рф по образованию в области транспортных машин и транспортнотехнологических.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 30.10.2023
Просмотров: 201
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
В.С. Кутепов, А.А. Пашин, А.В. Плясов
СИСТЕМА «РИТМ» В КУРСЕ
ТЕОРИИ МЕХАНИЗМОВ И МАШИН
Федеральное агентство по образованию Российской Федерации
Тульский государственный университет
Кафедра Проектирование механизмов и деталей машин
В.С. Кутепов, А.А. Пашин,
А.В. Плясов
СИСТЕМА «РИТМ» В КУРСЕ
ТЕОРИИ МЕХАНИЗМОВ И МАШИН
(Вторая редакция)
Учебное пособие
для студентов очной и заочной форм обучения
Рекомендовано
учебно-методическим объединением вузов РФ по образованию
в области транспортных машин и транспортно-технологических
комплексов в качестве учебного пособия для студентов, обучающихся
по специальности 190206 «Сельскохозяйственные машины и оборудование»
ИЗДАТЕЛЬСТВО ТулГУ
Тула, 2009
УДК 534.1 + 538.56
Система «РИТМ» в курсе теории механизмов и машин. Учеб. пособие /В.С. Кутепов, А.А. Пашин, А.В. Плясов, Тул. гос. ун-т, Тула, 2009. – 50 с.
Излагаются краткие сведения по теории структурного, кинематического и динамического анализа механизмов и машин и даются примеры выполнения заданий по системе «РИТМ» с вопросами, которые используются в тестах по курсу и приведены соответствующие на них ответы.
Пособие предназначено для студентов высших учебных заведений дневной и заочной форм обучения по направлению 190200 – Транспортные машины и транспортно-технологические комплексы.
Печатается по решению библиотечно-издательского совета Тульского
государственного университета.
Рецензент: профессор, докт. тех. наук Матченко Н.М.
ISBN – 5 – 7679 – 0079- 5 © В.С. Кутепов, А.А. Пашин,
А.В. Плясов, 2009
© Тульский государственный
университет, 2009
С
Стр.
Введение……………………………………………………………..…6
Содержание заданий …………………………………………………..6
1. Структурный анализ механизмов…………………………………..8
2. Кинематический анализ механизмов ………………………….....16
2.1. Задачи и методы…………………………………………...16
2.2. Свойства планов скоростей и ускорений…………….…..20
2.3. Примеры построения планов положений………………..20
2.4. Примеры построения планов скоростей…………………22
2.5. Примеры построения планов ускорений………………...28
3. Прикладная динамика машин…………...………………………...34
3.1. Силовой расчет механизма………………………………..34
3.2. Определение сил и моментов сил инерции………..……35
3.3. Величина и направление реакций…………….…..………36
3.4. Пример определения реакций в механизме……………...37
4. Анализ движения машинного агрегата…………………………...40
4.1. Динамическая модель машинного агрегата……………..40
4.2. Виды уравнений движения машинного агрегата……….41
4.3. Примеры построения динамических моделей…………..41
5. Контрольно-обучающие вопросы…………………………………44
5.1. Структура механизмов…………………………………….44
5.2. Кинематика механизмов…………………………………..46
5.3. Анализ движения машинного агрегата…………………..48
Рекомендуемый список литературы…………………………………50
Введение
Для приобретения умений и навыков решения задач анализа механизмов и машин и подготовки к выполнению курсового проектирования кафедра ПМДМ в третьем семестре параллельно с чтением лекций по курсу ТММ выдает студентам инженерных специальностей четыре задания по системе РИТМ.
Содержание заданий
Задание 1. Структурный анализ основного
шарнирно-рычажного механизма
-
Начертить структурную схему механизма согласно заданию -
Определить число подвижных звеньев механизма. Назвать их и указать характер движения. -
Определить число кинематических пар. Указать их класс, вид и соединяемые ими звенья. -
Определить число степеней свободы механизма. -
Выделить структурные группы Ассура, определить число степеней свободы, класс и порядок каждой из них. Выделить начальное звено. -
Сделать вывод о структуре механизма и его классе. -
Определить число избыточных связей в механизме. -
Устранить избыточные связи или снизить их число понижением классов кинематических пар. Начертить структурную схему соответствующего механизма. -
Ответить на контрольно-обучающие тестовые вопросы.
Задание 2. Кинематический анализ основного механизма
2.1 Начертить кинематическую схему механизма, соответствующую заданному положению кривошипа.
-
Записать векторные уравнения для построения плана скоростей. -
Построить план скоростей для заданного положения механизма. -
Определить величины и направления скоростей точек и угловых скоростей звеньев. -
Записать векторные уравнения для построения плана ускорений. -
Построить план ускорений для заданного положения механизма. -
Определить величины и направления ускорений точек и угловых ускорений звеньев. -
Ответить на контрольно-обучающие тестовые вопросы.
Задание 3. Силовой расчет механизма
3.1 Начертить наиболее удаленную от начального звена группу
Ассура.
-
Вычислить для каждого звена главный вектор сил инерции и главный момент сил инерции. -
Приложить все действующие на звенья группы Ассура силы.
3.4 Составить уравнения статики для каждого звена группы Ассура.
3.5 Из уравнений статики аналитически и графически (построением замкнутого векторного многоугольника) определить неизвестные усилия.
3.6 Начертить промежуточную группу Ассура.
3.8 Далее последовательно, начиная с пункта 3.3, выполнить все операции для промежуточной группы Ассура.
3.9 Определить реакцию в кинематической паре, соединяющей начальное звено и стойку. Определить уравновешивающий момент (уравновешивающую силу).
3.10 Ответить на контрольно-обучающие тестовые вопросы.
Задание 4. Анализ движения машинного агрегата
4.1 Выбрать и изобразить динамическую модель механизма.
4.2 Записать выражение и определить численное значение
приведенного момента инерции
4.3 Записать выражение и определить численное значение приведенного момента сил сопротивления
4.4 Записать уравнения движения в интегральной и дифференциальной формах.
4.5 Ответить на контрольно-обучающие тестовые вопросы.
Задание РИТМ выполняется на листах белой бумаги формата А4 с одной стороны. Текст пишется карандашом (перовой или гелиевой ручкой с темными чернилами), разборчиво. Рисунки оформляются карандашом по линейке. Расчеты делаются с точностью до трех значащих цифр. Допускается (с разрешения преподавателя) выполнение заданий в школьной тетради (12 листов).
Приветствуется оформление задания на персональном компьютере.
Рассмотрим выполнение задания «РИТМ», разобрав в качестве примера схемы: поперечно-строгального станка, брикетировочного автомата и компрессора. Кроме схем механизмов в заданиях на РИТМ приводятся исходные данные: размеры звеньев, их массы, моменты инерции и усилия технологического сопротивления. Следует учитывать примечание, приведенное внизу таблицы в некоторых заданиях.
1. Структурный анализ механизма
Пример 1
1.1Структурной схемой называется схема, указывающая стойку, подвижные звенья, виды кинематических пар и их взаимное расположение. Структурная схема изображается по заданию. Например, схема поперечно-строгального станка (рис.1.1)
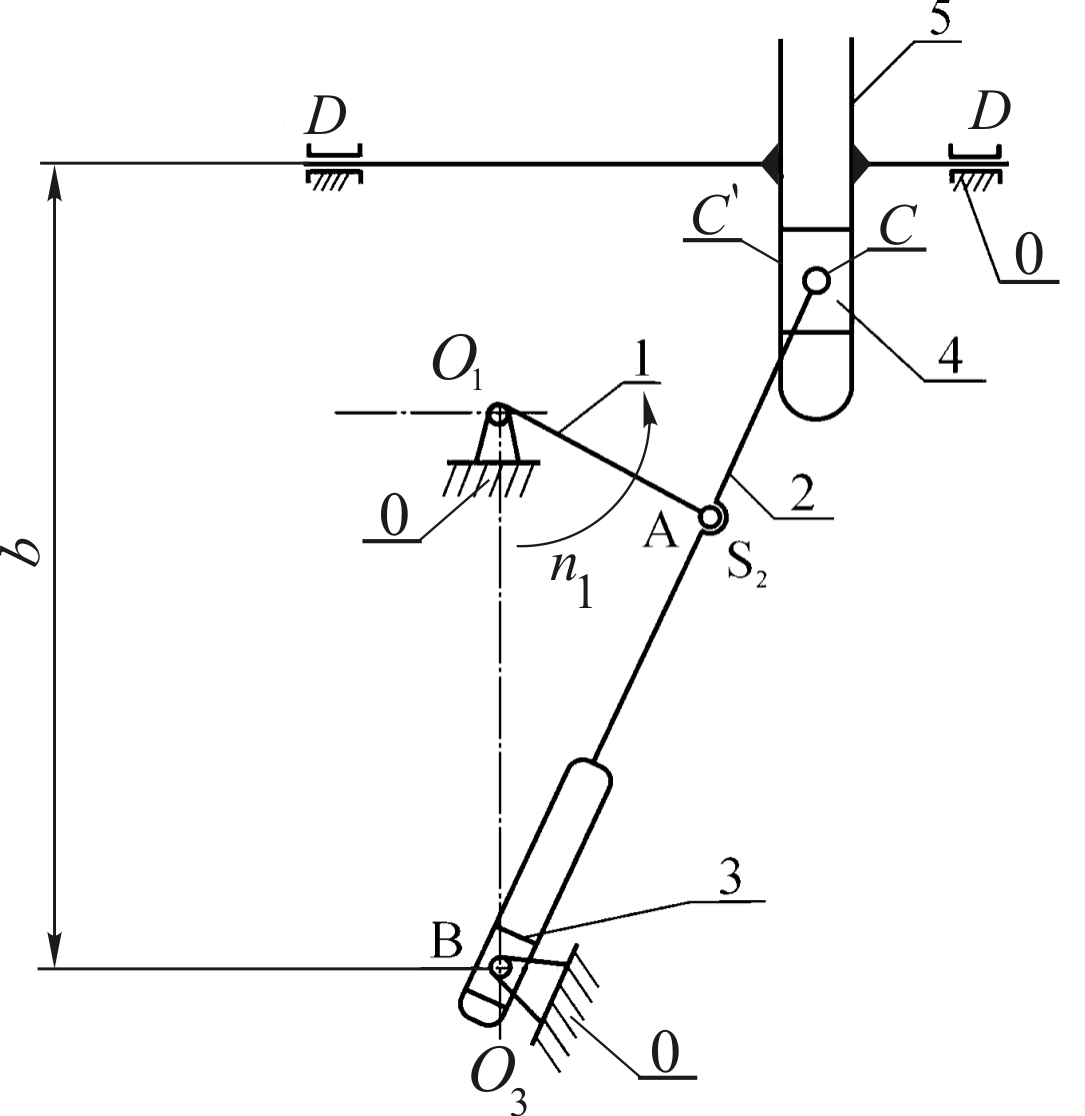
Рис. 1.1. Структурная схема шарнирно-рычажного механизма
поперечно-строгального станка
1.2 Звено– это деталь или несколько деталей, жестко связанных между собой и движущихся в механизме как одно целое.
Подвижные звенья обозначены на рис. 1.1 цифрами 1…5, неподвижное звено (стойка) цифрой 0. Подвижные звенья: 1 - кривошип, совершающий вращение вокруг точки О1 с постоянной частотой n1; 2 – кулиса, совершающая плоскопараллельное движение; 3 – камень, вращающийся вокруг точки О3; 4 – камень, движущийся поступательно; 5 – ползун, движущийся возвратно-поступательно. Входным звеном является кривошип 1, соединенный с приводом. Выходным звеном – ползун 5, с которым связан режущий инструмент поперечно-строгального станка. Механизм предназначен для преобразования вращательного движения кривошипа в возвратно-поступательное перемещение ползуна.
1.3 Кинематическая пара– это соединение двух соприкасающихся звеньев, допускающее их относительное движение. В данном механизме 7 кинематических пар. Все они являются низшими (их элементы – поверхности), высшие КП отсутствуют.
В данном механизме это кинематические пары:
| Обозначение | О1 | А | В | О3 | С | С′ | D |
| Соединяемые звенья | 0-1 | 1-2 | 2-3 | 3-0 | 2-4 | 4-5 | 5-0 |
Класс | 5 | 5 | 5 | 5 | 5 | 5 | 5 |
Вид | Вращ. | Вращ. | Пост. | Вращ. | Вращ. | Пост. | Пост. |
1.4 Число степеней свободы плоского механизма определим по формуле Чебышева
где
– число низших кинематических пар,
В нашем механизме
1.5 Любой механизм может быть образован путем последовательного присоединения к одному или нескольким начальным звеньям и стойке кинематических групп (групп Ассура) с нулевой сетью подвижности относительно тех звеньев, к которым группа присоединяется. Начальное звено – это звено, которому приписывается обобщенная координата. Это звено, образующее со стойкой кинематическую пару 5-го класса.
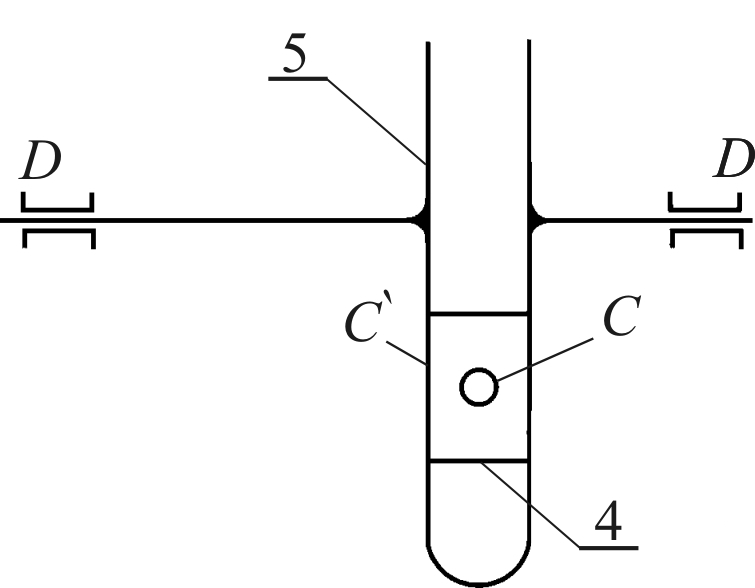 | 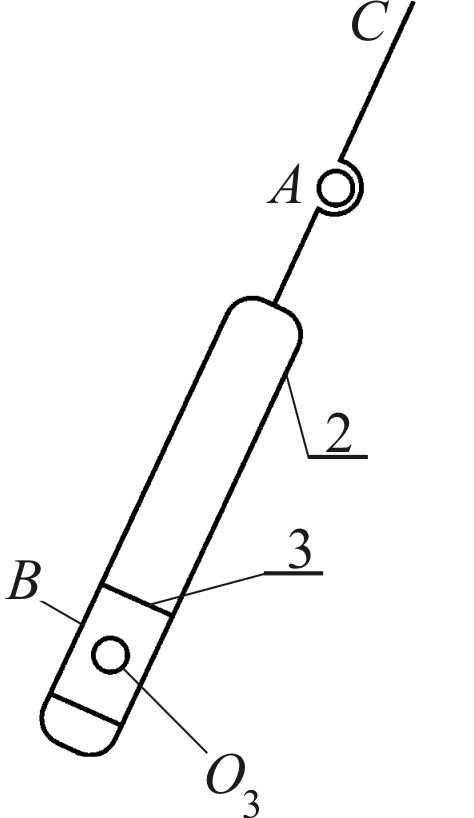 | 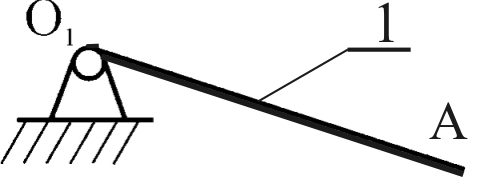 |
| Рис. 1.2. Группа 4-5 W= 3×2 – 2×3=0. Класс 2-ой, порядок 2-ой. | Рис. 1.3. Группа 2-3 W= 3×2 – 2×3=0. Класс 2-ой, порядок 2-ой. | Рис.1.4. Начальное звено W= 3×1 – 2×1=1 Класс 1-ый, порядок 1-ый |
Структурная группа не изменяет числа степеней свободы механизма, к которому она присоединяется, то есть
Выделим группы Ассура согласно приведенному соотношению
1.6. Предложенный механизм является плоским шарнирно-рычажным механизмом, имеет одну степень свободы, состоит из двух структурных групп и начального звена. Класс механизма определяется наивысшим классом, входящих в него структурных групп. Рассматриваемый механизм – 2-го класса.
1.7. Число избыточных связей определяем по формуле
1.8. Устраним избыточные связи, понизив классы кинематических пар. Чтобы обеспечить
0=1 – 6
5
=29.
Вторым уравнением является условие неизменности числа кинематических пар:
Первое равенство должно быть выполнено в механизме без избыточных связей, что обеспечивается
Более рациональным служит первое соотношение
При понижении класса кинематических пар следует иметь в виду: как правило не понижается класс кинематических пар, образованных подвижными звеньями со стойкой (
Понизим класс кинематических пар. Схема соответствующего механизма показана на рис. 1.5.
Примечание. Формальное устранение избыточных связей по уравнениям не всегда гарантирует их конструктивное исполнение. Так, невозможность применения пары 4-го класса в соединении звеньев 4-5 приводит к тому, что в контуре
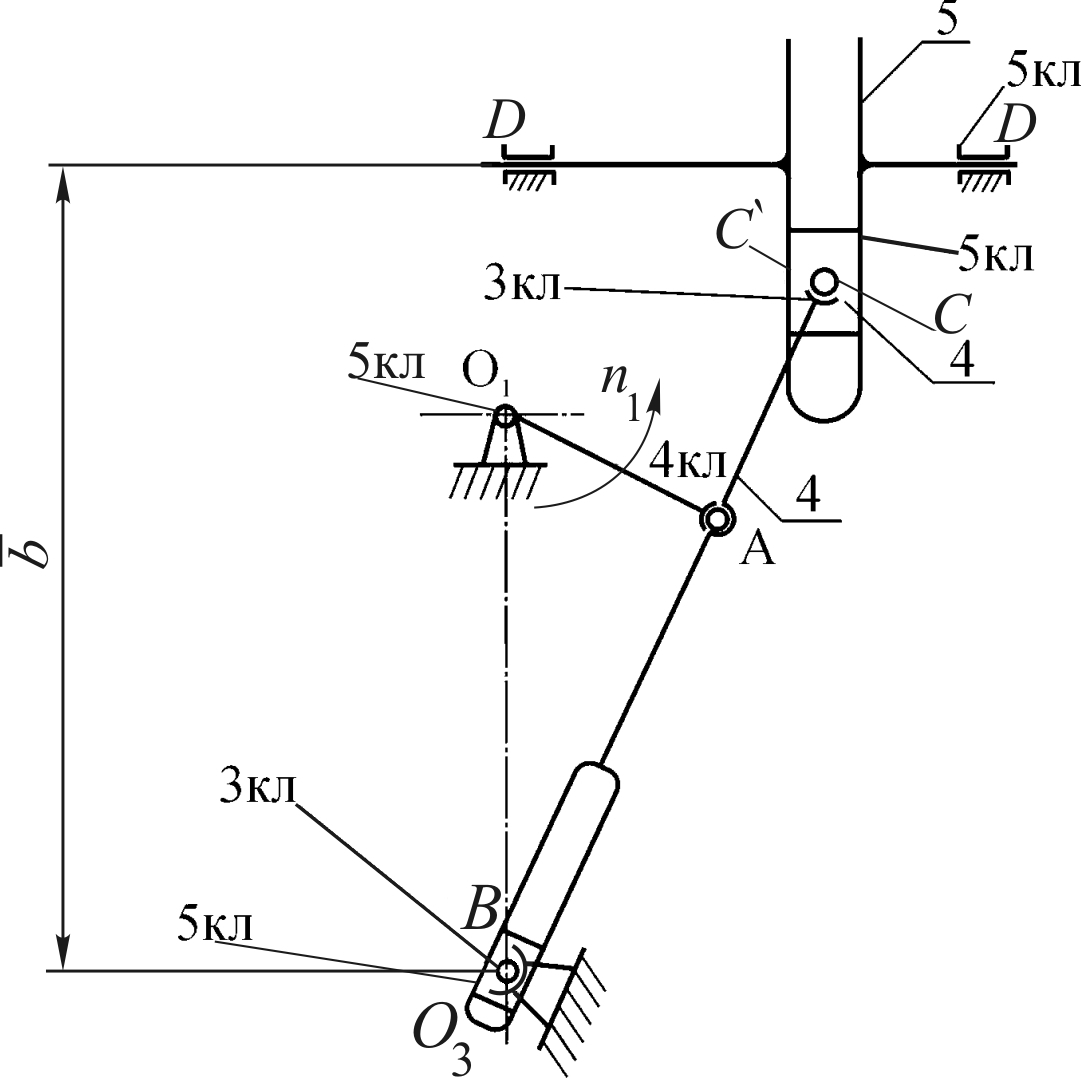
Рис. 1.5. Схема механизма поперечно-строгального