Файл: Учебное пособие для студентов очной и заочной форм обучения Рекомендовано учебнометодическим объединением вузов рф по образованию в области транспортных машин и транспортнотехнологических.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 30.10.2023
Просмотров: 209
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Пример 1
Схема механизма, построенного описанным выше методом, показана на рис. 2.5, а соответствующий план скоростей изображен на рис. 2.6.
Пусть задано
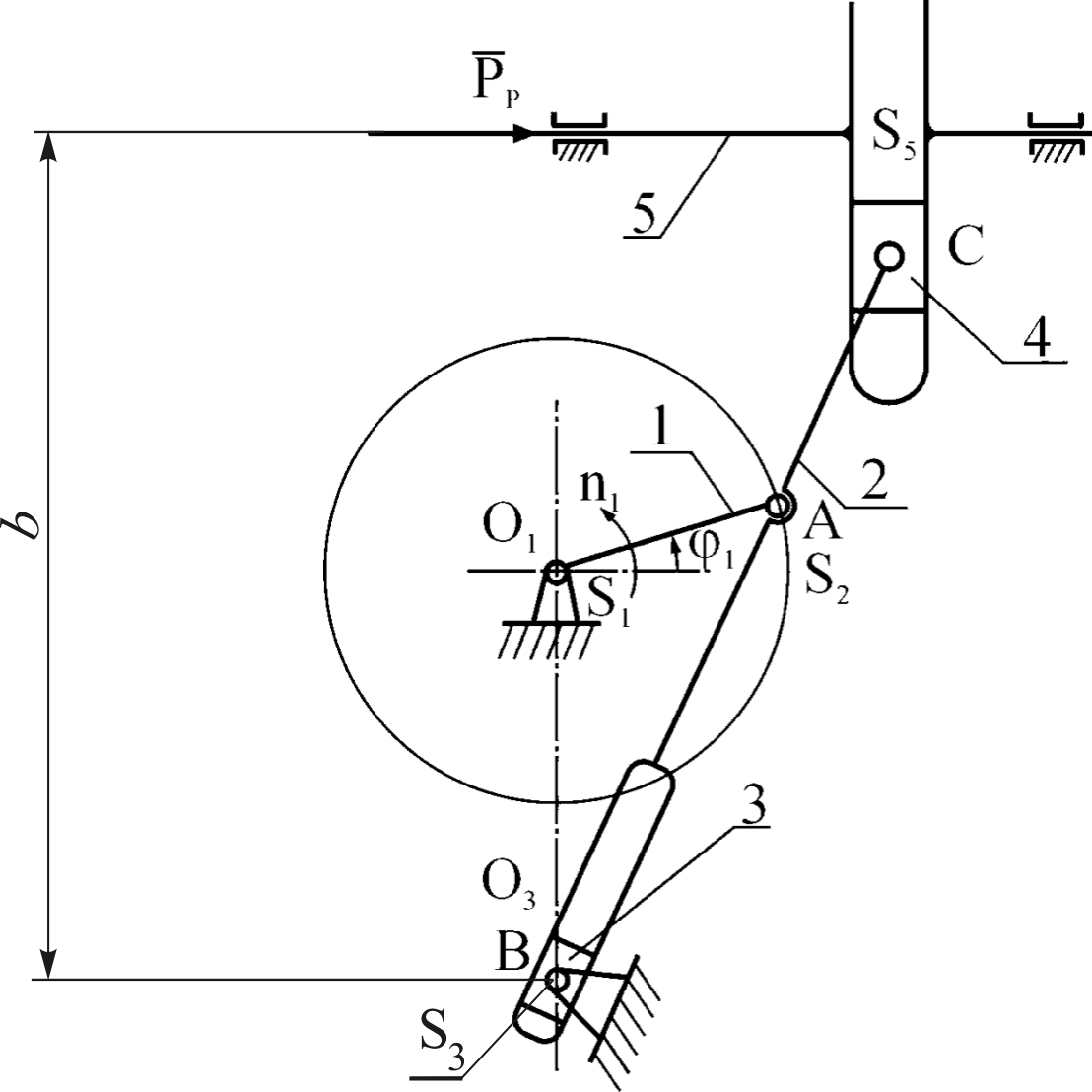
Рис. 2.5. Схема механизма
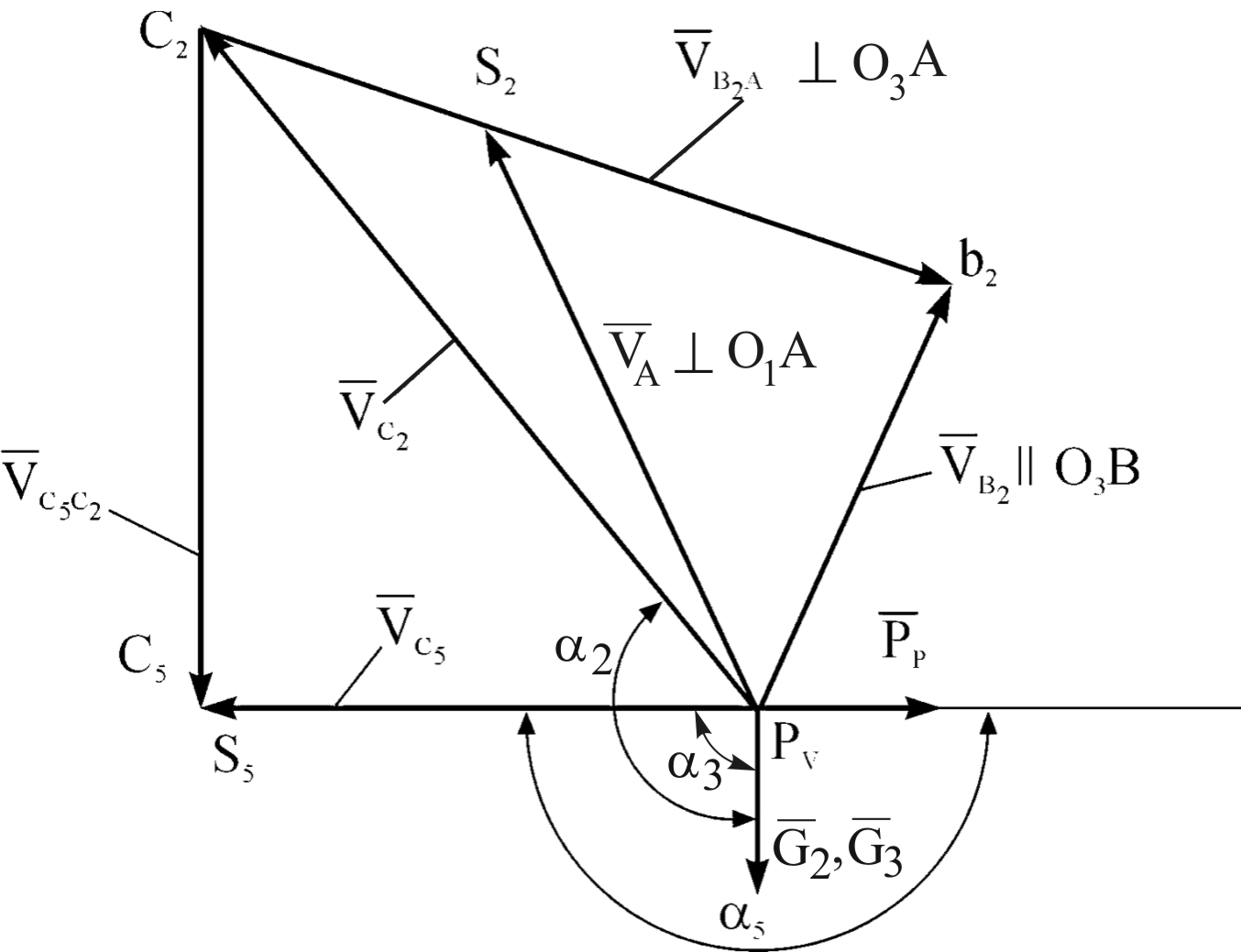
Рис. 2.6 План скоростей для поперечно-строгательного станка
Скорость точки А, принадлежащей одновременно первому и второму звену,
Рекомендуется принимать
или
Здесь
– скорость точки В2относительно неподвижной точки В0, то есть скорость в абсолютном движении,
Решая последнее уравнение графически (через точку
Скорость точки С можно определить, пользуясь свойством пропорциональности одноименных отрезков на плане положений механизма и на плане скоростей:
АС и АВ измеряемые на плане механизма, а
На продолжении отрезка
Для скорости точки С5пятого звена векторные уравнения имеют вид:
|| x || y
Решаем это уравнение графически. Из точки С2 проводим прямую, перпендикулярную направлению движения штока 5, а из полюса
соответствует в масштабе
Определяем величины скоростей.
где
Находим угловую скорость звена 2:
которая направлена против часовой стрелки.
Примечание: Приведенные выше значения отрезков в мм при вычислении скоростей, могут изменится после размножении пособия.
Пример 2
Схема механизма брикетировочного автомата построена на рис. 2.7, а план скоростей и ускорений соответственно на рис. 2.8 и рис.2.12.
Задано:
Построение планов начинаем с определения скоростей (ускорений) точек закон движения которых известен. Скорость точки А1,2, принадлежит одновременно 1 и 2 звену камню равна
Задаемся длиной вектора
Из произвольно выбранной на чертеже точки
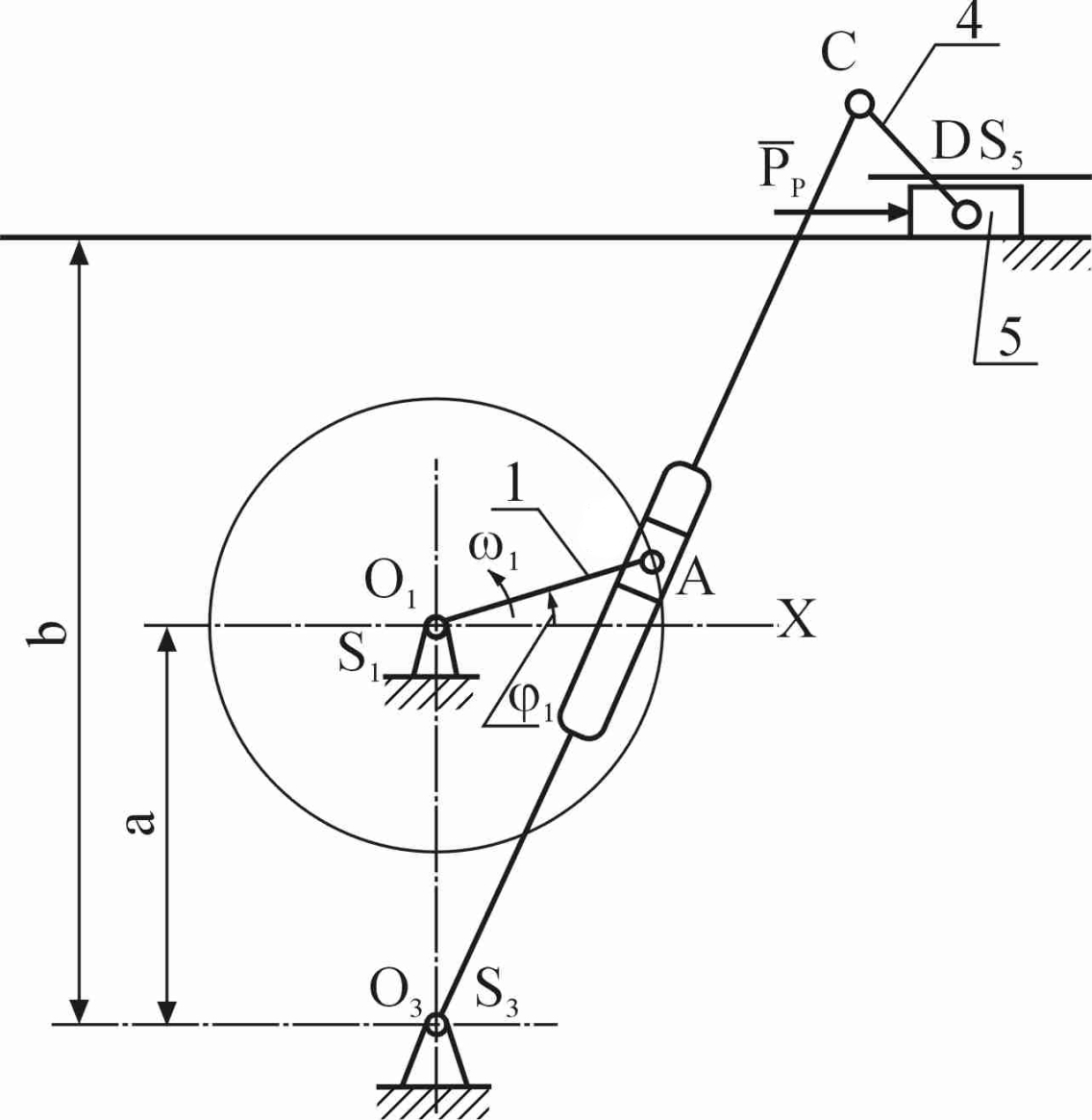
Рис. 2.7. Схема механизма брикетировочного автомата
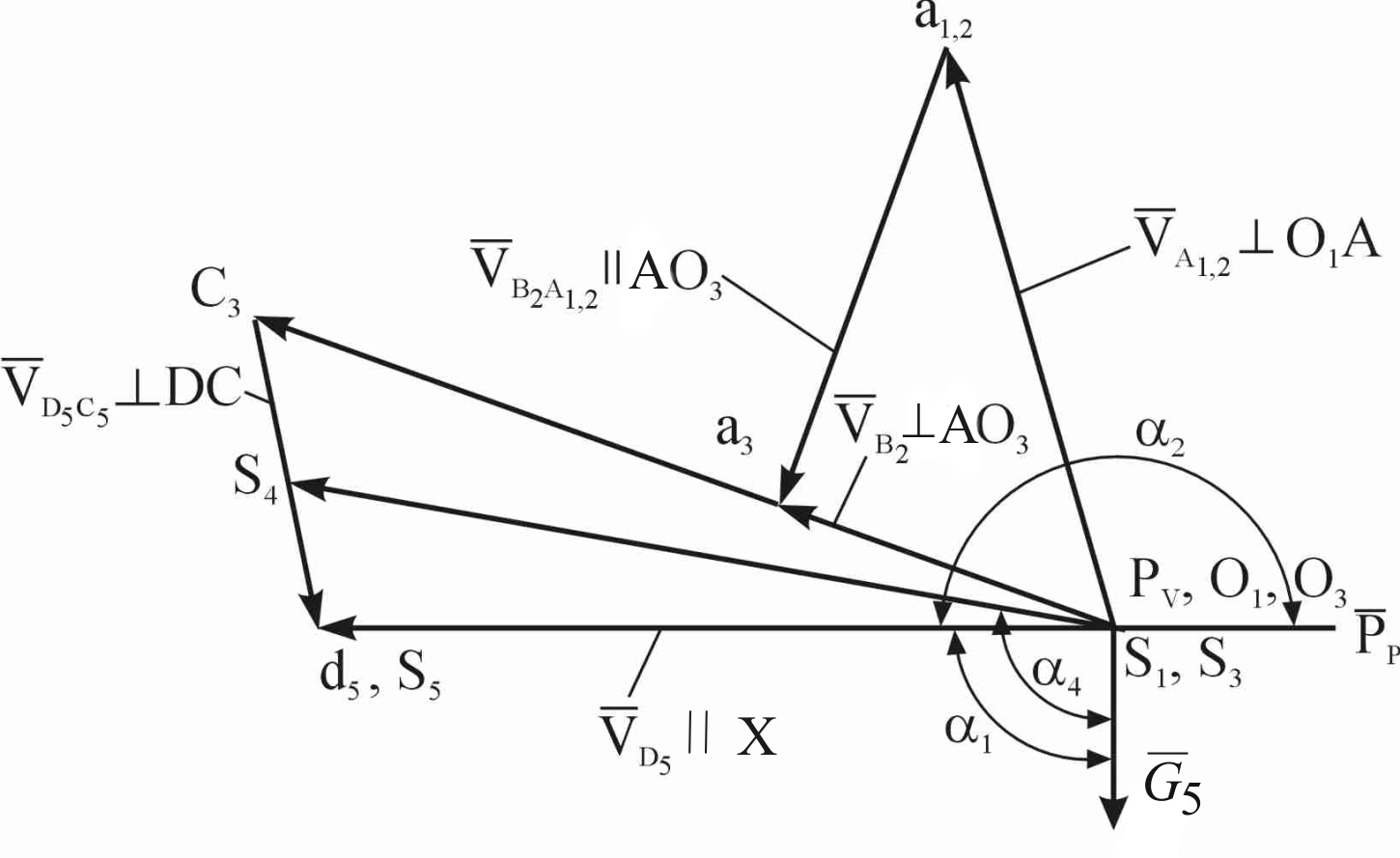
Рис. 2.8 План скоростей механизма брикетировочного автомата
Запишем уравнения
Здесь
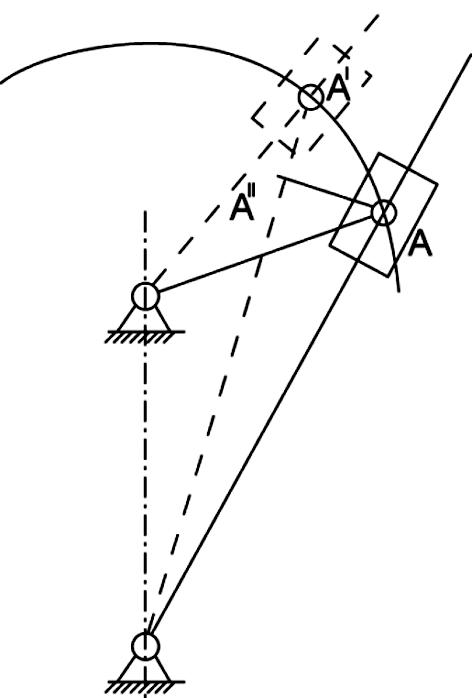
Рис.2.9. Сложение движений
Векторные уравнения решаем графически (рис. 2.8) Через полюс
– конец вектора
а именно:
Откладываем на продолжение
Для скорости точки D векторное уравнение имеет вид
|| X
Решаем это уравнение графически (рис. 2.8). Через полюс рv проводим направление скорости параллельно оси Х. Через точку c3 проводим направление относительной скорости
Определяем величины линейных скоростей точек звеньев механизма: