Файл: Министерство транспорта российской федерации федеральное государственное бюджетное образовательное учреждение.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 05.12.2023
Просмотров: 406
Скачиваний: 2
СОДЕРЖАНИЕ
ОПРЕДЕЛЕНИЯ, ОБОЗНАЧЕНИЯ И СОКРАЩЕНИЯ
Основные положения концепции PBN в области навигации и самолетовождения
1.1 Базовые понятия и определения
1.4 Область применения навигации, основанной на характеристиках
1.5 Навигационные спецификации
1.6 Требования к навигационным функциональным возможностям
1.7 Обозначение спецификаций RNP и RNAV
1.8 Правильное понимание обозначений RNAV и RNP
1.9 Планирование полетов с учетом обозначений RNAV и RNP
1.10 Использование и сфера применения навигационных спецификаций
1.11 Пример применения спецификаций RNAV и RNP на маршрутах ОВД и в схемах полета по приборам
2 Контроль на борту за выдерживанием характеристик и выдача предупреждений
2.1 Компоненты навигационных погрешностей и выдача предупреждений
2.2 Роль контроля на борту за выдерживанием характеристик и выдачи предупреждений
2.4 Применение контроля за выдерживанием характеристик и выдачи предупреждений на воздушных судах.
2.5 Требования к системе в части контроля за характеристиками и выдачи предупреждений
2.6 Использование навигации, основанной на характеристиках
2.7 Правила применяемые ко всем полетам с применением PBN
3.1 GBAS (ground based augmentation system) – система наземного дополнения
3.2 Совмещение разработок в области PBN с использованием систем GLS.
3.3 Специфика выполнения захода по правилам PBN на ВС Boeing 737 NG
4 Выполнение заходов RNP с использованием GLS как способ уменьшения количества инцидентов CFIT.
4.1 CFIT, понятия, определения
4.2 Особенности риска CFIT в горной местности
4.3 Анализ схемы захода и рекомендации к её изменению в аэропорту «Халим», г. Джакарта
5 Влияние применения PBN в процессе выполнения заходов на экономические показатели эксплуатанта
5.1 Анализ примеров применения концепции PBN в практике международных аэропортов
5.2 Анализ экономических исследований в области применения PBN
1.9 Планирование полетов с учетом обозначений RNAV и RNP
Правила, касающиеся обозначений спецификаций в плане полета, содержатся в «Правилах аэронавигационного обслуживания. Организация воздушного движения (PANS-ATM) (Doc 4444)».
В связи с внедрением концепции PBN ИКАО в поправке к Doc 4444 от 15 ноября 2012 детализирована информация об оборудовании зональной навигации.
Для ВС, допущенных к полетам PBN в поле 10 указывается буква “R”, а в поле 18 после аббревиатуры PBN информация детализируется в соответствии с нижеследующей таблицей:
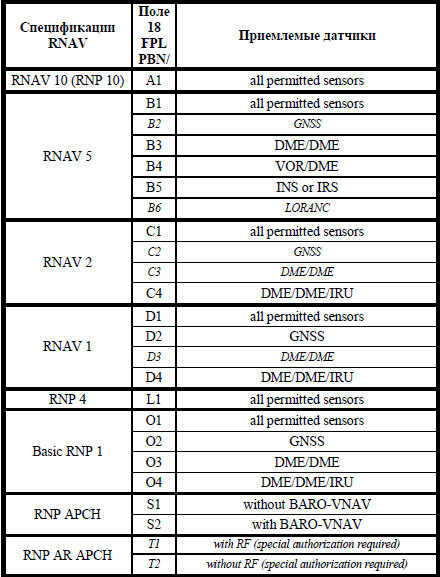
Рисунок 4 – Правила обозначения спецификаций в плане полета
Пример: PBN/A1B1C1D1L1O1S1 – для ВС, оборудованных GPS;
PBN/A1B3B4B5C4D4O4 – для ВС, не оборудованных GPS;
1.10 Использование и сфера применения навигационных спецификаций
Большинство навигационных спецификаций ИКАО было первоначально разработано для регионального использования с целью удовлетворения эксплуатационных потребностей конкретных концепций воздушного пространства.
Гармонизация и опубликование навигационных спецификаций в Doc 9613 ИКАО позволило избежать распространения региональных или национальных навигационных спецификаций, поскольку теперь регионы и государства могут использовать существующие навигационные спецификации ИКАО вместо разработки новых.
В таблице указаны навигационные спецификации и соответствующие им значения навигационной точности. Например, в таблице показано, что обозначение океанической/удаленной, маршрутной навигационной спецификации или навигационной спецификации в районе аэродрома, включает значение требуемой навигационной точности, а навигационные спецификации, используемые на конечном этапе захода на посадку, имеют другое обозначение.
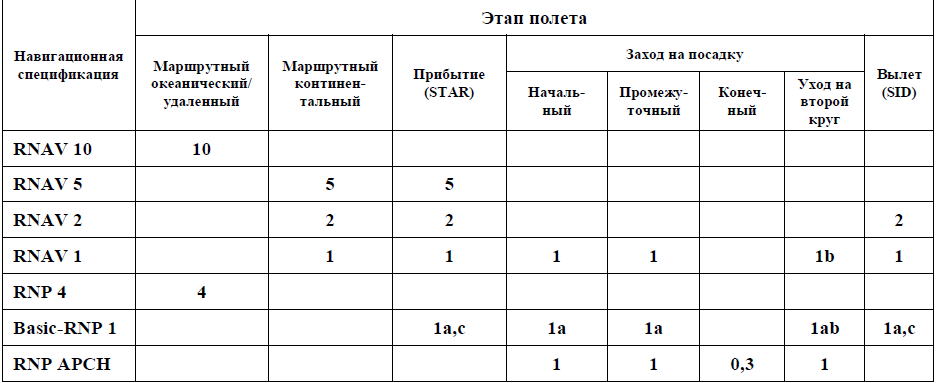
Рисунок 5 – Cпецификации и соответствующие значения навигационной точности
а) Используется только на маршрутах STAR и SID.
б) Может применяться только после начального набора высоты на этапе ухода на второй круг.
в) За пределами 30 м. миль от контрольной точки аэродрома (КТА) значение точности для выдачи предупреждения становится равным 2 м. милям.
Примечание.
1. Приведенные в таблице цифры указывают на требование к точности 95 % (м. миль).
2. RNAV 5 является маршрутной навигационной спецификацией, которая может использоваться на начальном участке STAR за пределами 30 м. миль и выше MSA.
1.11 Пример применения спецификаций RNAV и RNP на маршрутах ОВД и в схемах полета по приборам
Рисунок 6 – Использование спецификаций RNAV и RNP в полете
Навигационные спецификации ИКАО не предусматривают всех требований, которые могут быть предписаны для выполнения полетов в конкретном воздушном пространстве, по маршруту или в конкретном районе. Такие дополнительные требования указываются в других документах, таких как эксплуатационные правила, сборники аэронавигационной информации (AIP) и в документе ИКАО "Дополнительные региональные правила" (Doc 7030). Эксплуатационные утверждения главным образом относятся к навигационным требованиям воздушного пространства; однако перед выполнением полетов в воздушное пространство соответствующий государственный полномочный орган, ответственный за это воздушное пространство, требует от эксплуатантов и летного экипажа принимать во внимание все эксплуатационные документы, относящиеся к данному воздушному пространству.
2 Контроль на борту за выдерживанием характеристик и выдача предупреждений
2.1 Компоненты навигационных погрешностей и выдача предупреждений
2.1.1 Боковая навигация
Неспособность обеспечить требуемую точность боковой навигации может объясняться навигационными погрешностями, относящимися к выдерживанию линии пути и определению местоположения ВС. Тремя основными компонентами погрешности в контексте контроля за выдерживанием характеристик и выдачи предупреждений являются:
1. Погрешность определения траектории (path definition error – PDE),
2. Погрешность техники пилотирования (flight technique error – FTE) и
3. Погрешность навигационной системы (navigation system error – NSE).
Суммарная величина этих погрешностей обозначается как total system error – TSE.
Рисунок 7 – Основные компоненты погрешности TSE
а) PDE имеет место, когда определенная системой RNAV траектория не совпадает с желаемой траекторией.
б) FTE относится к способности летного экипажа или автопилота следовать по определенной траектории или линии пути, включая любые погрешности индикации (например, погрешность центрирования индикатора отклонения от курса (CDI)). FTE может контролироваться автопилотом или посредством установленных процедур для летного экипажа, а то, насколько эти процедуры необходимо дополнять другими средствами, зависит, например, от этапа полета и типа операций. Такой дополнительный контроль может быть обеспечен картографическим индикатором воздушной обстановки.
в) NSE представляет собой разницу между расчетным и фактическим местоположением ВС.
2.1.2 Продольная навигация
Требования к точности в спецификациях RNAV и RNP определены для бокового и продольного (вдоль линии пути) измерений. Требования спецификаций RNP к контролю на борту за выдерживанием характеристик и выдаче предупреждений определяются для бокового измерения.
Однако NSE является радиальной погрешностью, и таким образом контроль на борту за выдерживанием характеристик и выдача предупреждений обеспечивается во всех направлениях.
Рисунок 7 – Принцип определения допустимой погрешности
2.2 Роль контроля на борту за выдерживанием характеристик и выдачи предупреждений
Полеты по RNAV подразумевают обеспечение выдерживания необходимых характеристик бортовых систем. Исходя из существующих критериев летной годности, от систем RNAV требуется лишь продемонстрировать наличие предполагаемых функций и характеристик. Это
приводит к тому, что, хотя заявленные характеристики системы RNAV могут быть весьма хорошими, они подвержены изменяемости функциональных возможностей системы. Системы имеющие функцию RNP позволяют свести к минимуму изменяемость и обеспечить надежность, повторяемость и предсказуемость при производстве полетов.
Функция RNP позволяет экипажу обнаружить, соблюдает ли система требуемые навигационные характеристики, предусмотренные навигационной спецификацией. Это относится как к боковым, так и к продольным навигационным характеристикам.
– “На борту” ясно означает, что контроль осуществляется на борту ВС, а не где-либо еще, например, с использованием наземного блока контроля за выдерживанием маршрута или с помощью наблюдения УВД. Контролирующий элемент функции RNP имеет отношение к FTE и NSE. Погрешность определения траектории (PDE) ограничивается оценкой целостности базы данных и функциональных требований на определяемой траектории и в расчет не принимается.
– “Контроль” означает контроль за характеристиками ВС в части его способности определить погрешность местоположения и/или следовать по желаемой траектории.
– “Выдача предупреждений” имеет отношение к контролю: если навигационная система ВС не функционирует надлежащим образом, летному экипажу об этом будет выдано предупреждение.
Требования к контролю и выдаче предупреждений могут быть соблюдены с помощью:
а) бортовой навигационной системы, обладающей возможностью контролировать NSE и выдавать предупреждения (например, алгоритм RAIM или FDE), плюс индикатор боковой навигации (например, CDI), позволяющий экипажу следить за FTE. Исходя из допущения, что PDE в расчет не принимается, данное требование соблюдается, поскольку NSE и FTE отслеживаются, что обеспечивает контроль за TSE; или
б) бортовой навигационной системой, обладающей возможностью контролировать TSE и выдавать предупреждения.
Результирующее влияние вышеизложенного очевидно в TSE.
Приведенные в таблице спецификации RNP X, которые не требуют RF или FRT, имеют много общего со спецификациями RNAV в части PDE, поскольку желаемая траектория не определяется; в результате этого на развороте потребуется обеспечить дополнительное защищенное воздушное пространство.
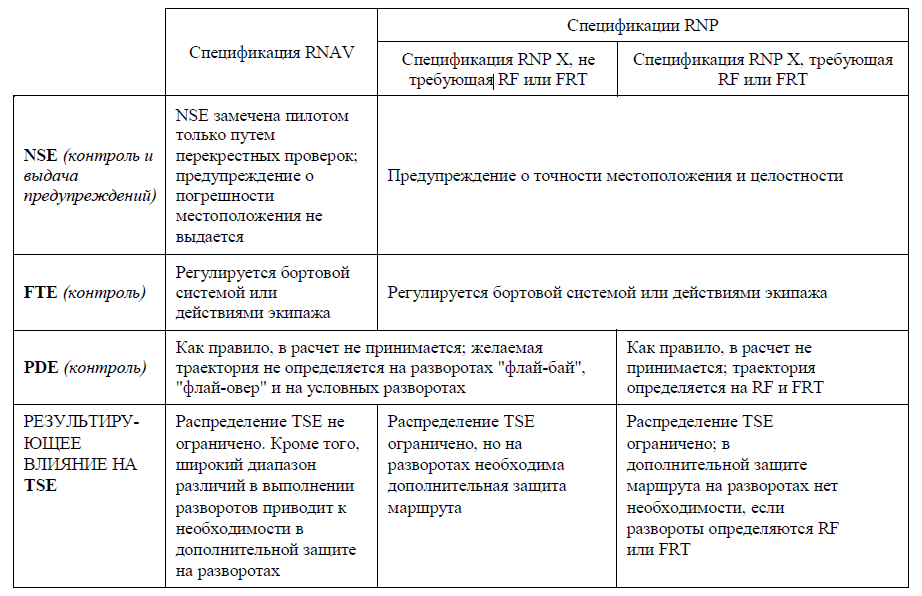
Рисунок 8 – Таблица спецификаций RNP X