Файл: Министерство транспорта российской федерации федеральное государственное бюджетное образовательное учреждение.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 05.12.2023
Просмотров: 413
Скачиваний: 2
СОДЕРЖАНИЕ
ОПРЕДЕЛЕНИЯ, ОБОЗНАЧЕНИЯ И СОКРАЩЕНИЯ
Основные положения концепции PBN в области навигации и самолетовождения
1.1 Базовые понятия и определения
1.4 Область применения навигации, основанной на характеристиках
1.5 Навигационные спецификации
1.6 Требования к навигационным функциональным возможностям
1.7 Обозначение спецификаций RNP и RNAV
1.8 Правильное понимание обозначений RNAV и RNP
1.9 Планирование полетов с учетом обозначений RNAV и RNP
1.10 Использование и сфера применения навигационных спецификаций
1.11 Пример применения спецификаций RNAV и RNP на маршрутах ОВД и в схемах полета по приборам
2 Контроль на борту за выдерживанием характеристик и выдача предупреждений
2.1 Компоненты навигационных погрешностей и выдача предупреждений
2.2 Роль контроля на борту за выдерживанием характеристик и выдачи предупреждений
2.4 Применение контроля за выдерживанием характеристик и выдачи предупреждений на воздушных судах.
2.5 Требования к системе в части контроля за характеристиками и выдачи предупреждений
2.6 Использование навигации, основанной на характеристиках
2.7 Правила применяемые ко всем полетам с применением PBN
3.1 GBAS (ground based augmentation system) – система наземного дополнения
3.2 Совмещение разработок в области PBN с использованием систем GLS.
3.3 Специфика выполнения захода по правилам PBN на ВС Boeing 737 NG
4 Выполнение заходов RNP с использованием GLS как способ уменьшения количества инцидентов CFIT.
4.1 CFIT, понятия, определения
4.2 Особенности риска CFIT в горной местности
4.3 Анализ схемы захода и рекомендации к её изменению в аэропорту «Халим», г. Джакарта
5 Влияние применения PBN в процессе выполнения заходов на экономические показатели эксплуатанта
5.1 Анализ примеров применения концепции PBN в практике международных аэропортов
5.2 Анализ экономических исследований в области применения PBN
3.3 Специфика выполнения захода по правилам PBN на ВС Boeing 737 NG
Для выполнения захода по требованиям RNP при помощи GLS, необходимо изучить индикацию RNP и ANP на БРЭО ВС Boeing 737 NG, а также требования к технической конфигурации данного ВС.
Контроль за выполнением захода на посадку (выдерживание горизонтальной и вертикальной траектории) ведется на основании индикации RNP/ANP на ND (navigation display) на приборной панели ВС.

Рисунок 16 – Индикация параметров RNP и ANP на ND
В центральной нижней части дисплея индицируется заданное значение RNP и фактическое значение ANP в горизонтальной плоскости (в плане). В правой нижней части дисплея индицируются значения RNP и ANP в вертикальной плоскости (в профиль), с визуализацией отклонения ВС от желаемой траектории. Стоит напомнить, что в процессе выполнения захода значение ANP должно быть меньше значения RNP. В случае нарушения данного критерия, заход на посадку необходимо прекратить.
Также контроль за достижением требуемого RNP пилот ВС должен вести по странице RNP PROGRESS на CDU. Пролет участка пути до ППМ по RNP контролируется следующим образом (по строкам):
-
ЗМПУ и оставшееся расстояние до ППМ -
Название ППМ, далее скорость/высота над ППМ (расчетные) -
Соотношение RNP/ANP и вертикальных RNP/ANP -
Рассчитанное удаление от ЛЗП отклонение от вертикальной траектории.

Рисунок 17 – Использование страницы RNP PROGRESS на CDU
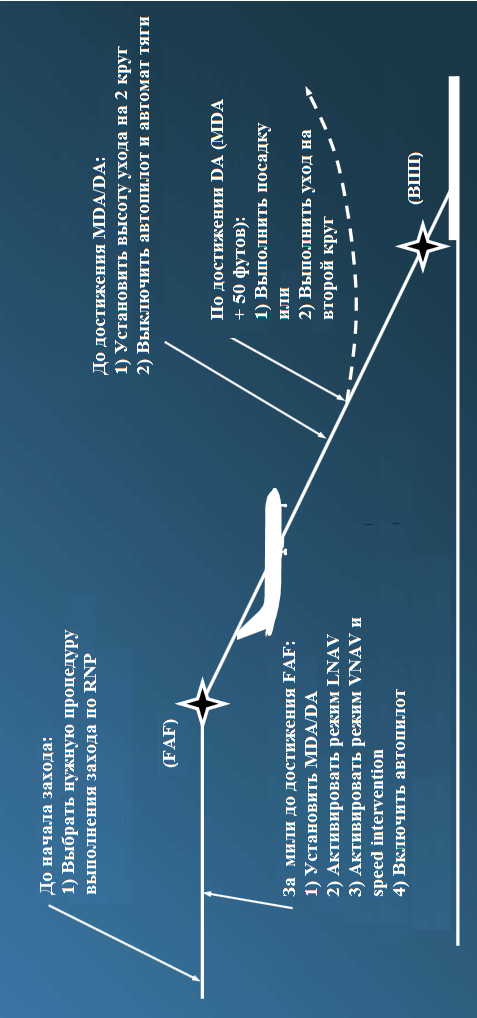
Процесс выполнения захода RNP на ВС Boeing 737 NG можно разделить на следующие этапы:
-
До начала захода -
2 м. мили до FAF -
До достижения MDA/DA -
Над DA (MDA + 50 футов)

3.3.1 Требования к конфигурации ВС Boeing 737 NG для выполнения захода RNP AR APCH:
Таблица 2 – требования к конфигурации ВС Boeing 737 NG для выполнения RNP AR APCH
| Требуемые значения RNP | Необходимое оборудование, опции, процедуры |
| RNP AR 0.30 м. мили на конечном этапе захода и 1.0 м. мили при уходе на 2 круг | - Активация режимов speed intervention и altitude intervention - Два комплекта FMC |
| RNP AR <0.30 м. мили на конечном этапе или < 1.0 м. мили при уходе на второй круг |
|
3.4 Выводы, рекомендации
Стоит отметить, что система захода GLS типа ЛККС-2000 подразумевает заход на посадку ВС Boeing 737 NG по правилам PBN и продолжение захода на посадку после DA с максимальными показателями точности. (См. приложение 1)
Таким образом, в качестве основного решения для выполнения заходов на посадку в ближайшем будущем, авиакомпаниям предлагается подготовка ВС типа Boeing 737 NG к выполнению заходов типа RNP AR APCH. Установка бортового оборудования, поддерживающего работу с системами типа GLS, позволит значительно повысить уровень БП при выполнении заходов RNP (при наличии соответствующего оборудования в аэродроме назначения). Также при работе с системами дополнения спутникого сигнала значительно меняется технология работы экипажа, используются другие источники информации, индикация и сигнализация. Поэтому, в качестве грамотного решения для авиапредприятий будет модернизация тренажерных комплексов для авторизации экипажей для выполнения заходов. Для УВАУГА(и) будет целесообразным провести дополнительные занятия для курсантов пятого курса в целях информирования о перспективных типах заходов на посадку с использованием PBN и GLS.
4 Выполнение заходов RNP с использованием GLS как способ уменьшения количества инцидентов CFIT.
4.1 CFIT, понятия, определения
Столкновение с землёй в управляемом полёте (англ. CFIT, Controlled flight into terrain, произносится «си-фит») — авиационный термин, преимущественно употребляемый в англоязычной (или переводной) авиационной литературе и обозначающий авиационное происшествие, в ходе которого исправное воздушное судно, управляемое экипажем в штатном режиме, сталкивается с земной, водной поверхностью или неподвижными препятствиями, не являющимися другими самолётами (в последнем случае это называется «столкновением», англ. collision). Термин “CFIT” был предложен инженерами компании Boeing в конце 70х годов.
До сих пор CFIT послужил причиной большинства летальных исходов во время выполнения коммерческих перевозок на воздушном транспорте (более 10000 жертв). Одой из причин возникновения CFIT является неустойчивая или неисправная работа навигационного оборудования и ошибки пилотов.
4.2 Особенности риска CFIT в горной местности
Стоит отметить, что в условиях горных аэродромов и аэродромов с большим количеством естественных препятствий точность, исправность навигационного оборудования является решающим фактором в уменьшении риска во время эксплуатации ВС.
4.2.1 Катастрофа ВС Sukhoy Super Jet 100 в Индонезии
Одной из нашумевших катастроф в горной местности за последние годы стала катастрофа самолета Sukhoy Super Jet 100 в Индонезии. Тогда при демонстрационном полете лайнера, который эксплуатировал его производитель – компания «Гражданские самолеты Сухого», самолет столкнулся с горой Салак, погибли 45 человек, в том числе восемь россиян, 34 гражданина Индонезии, один – США и один – Франции. Основной вывод комиссии: причиной катастрофы стал комплекс факторов, большинство из которых в практике авиационных специалистов принято называть «человеческими». Расследование подтвердило, что SSJ-100 был технически исправлен и перед выполнением полета, и в течение всего полета; подготовка к полету проходила согласно существующим регламентам, а режим труда и отдыха экипажа в течение 48
часов перед полетом соответствовал нормам; экипаж в полете имел всю необходимую документацию, в том числе картографическую (на картах была обозначена горная местность вокруг зоны полета, но информация по высотам была недостаточно детализирована), а в систему предупреждения о возможном столкновении с землей (TAWS) была загружена актуальная база данных о рельефе местности.
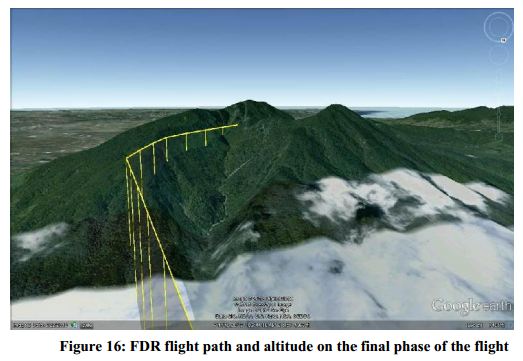
Рисунок 19 – Траектория SSJ-100 перед столкновением с элементом рельефа
Первый демонстрационный полет 9 мая SSJ-100 совершил из международного аэропорта «Халима» в районе «Богор» на высоте 10 тыс. футов (в одном футе 0,3 метра), не покидая пределов этой зоны испытания военных самолетов. К началу второго полета погода испортилась, направление ветра изменилось, и диспетчер согласовал иной маршрут полета. В 14.20 по местному времени самолет взлетел, взял курс направо в направлении согласованного радиала (курса) и через четыре минуты поднялся на высоту 10 тыс. футов. Об этом экипаж проинформировал диспетчерскую службу Jakarta Approach.
Снижение и дальнейший полет по правому кругу (в радиообмене использовался термин orbit, хотя более употребим right/left 360) потребовались экипажу для того, чтобы не находиться слишком высоко перед планируемой посадкой на полосу в аэропорте Халима.
В итоговом релизе KNKT отмечает, что свою роль в катастрофе сыграли несколько факторов. Специалисты назвали основными три из них. Экипаж не принял в расчет гористый рельеф местности, поэтому проигнорировал предупреждения TAWS. Внимание пилота отвлекалось разговорами, поэтому пилот не сразу изменил направление полета, когда самолет отклонился от заданной траектории разворота. На радарах в Джакарте не была установлена минимальная граница высоты для самолета, которому задан вектор, а радары не имели системы звукового предупреждения о минимальной безопасной высоте (MSAW), необходимой для полетов в районе горы Салак.
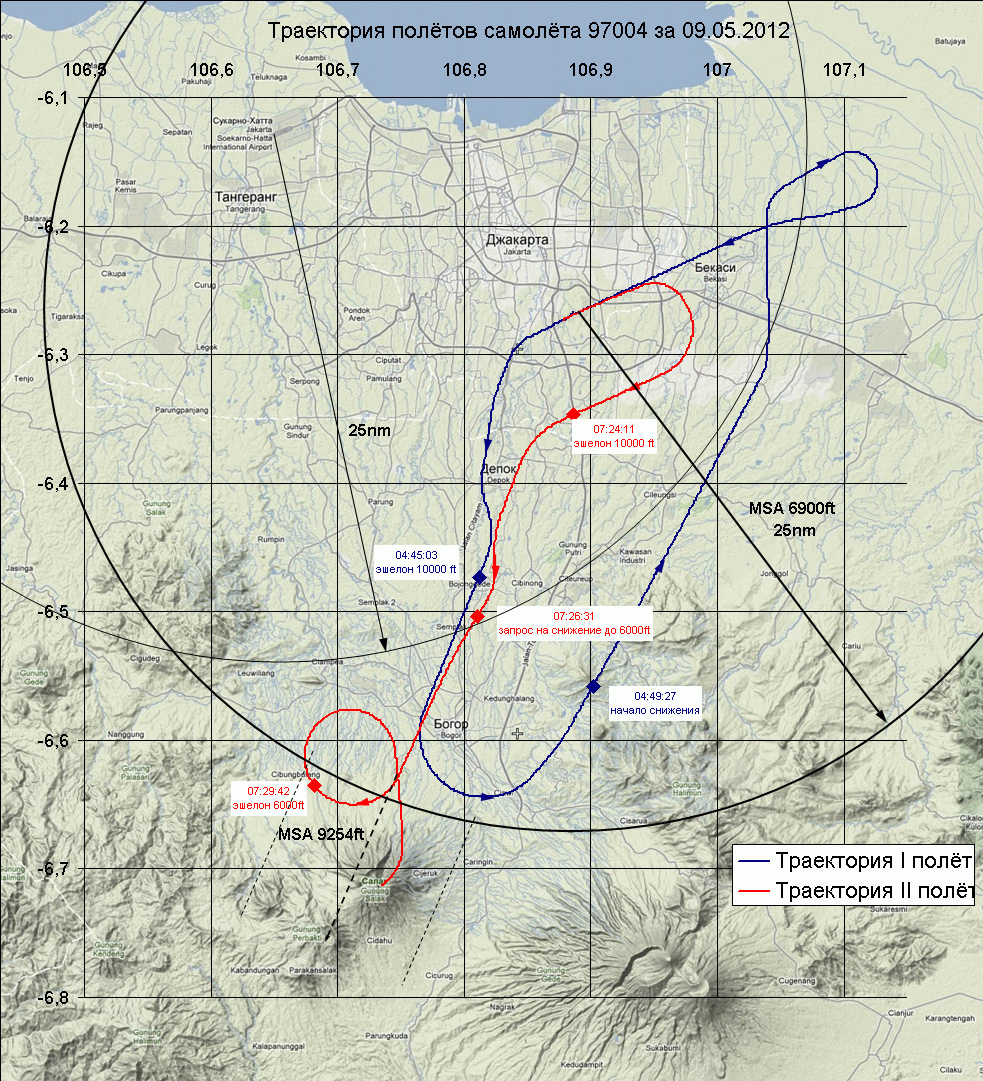
Рисунок 20 – Траектория полета RRJ-95 до катастрофы
На мой взгляд, есть еще одна значимая причина данного АП. Любая вероятность возникновения ошибки связанной с пилотированием воздушного судна в условиях опасных элементов рельефа должна исключаться на стадии планирования схемы захода на ВПП с данным курсом посадки и размещения на аэродроме “правильных” РТС.