Файл: 1. 1 Обоснование необходимости разработки мехатронной системы.doc
Добавлен: 26.10.2023
Просмотров: 414
Скачиваний: 13
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
1.1 Обоснование необходимости разработки мехатронной системы
2.2 Подбор элементов мехатронной системы
3 Проектирование, конструирование технических средств
3.2 Выбор средств автоматизации и элементов управления
4.1 Описание пуско-наладки компонентов и модулей мехатронных систем
4.2 Разработка управляющей программы мехатронной системы
5.2. Расчет эксплуатационных затрат
5.3 Оценка экономической эффективности проектируемой системы
Список использованных источников
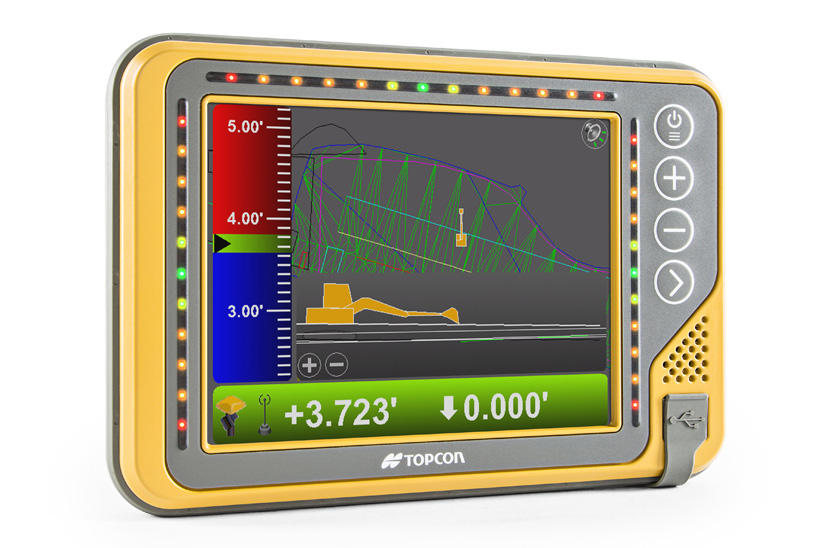
Рисунок 6 – Панель управления GX-55
Рисунок контроллера представлен на рисунке 7. Контроллер MC-X1 является основным управляющим CAN модулем и обеспечивает обмен данными со всеми датчиками и компонентами системы. Его особенность заключается в модульной структуре – это значит, что количество входов и выходов может меняться в зависимости от модуля. Его характеристики видны в таблице 6.
Таблица 6 – Характеристики контроллера
| Наименование | Показатель |
| Порты коммуникации | RS-232, CAN, Ethernet, Digital |
| Каналы связи | WiFi, BT |
| Материал корпуса | ABS - пластик |
| Питание | 9 - 32 Вольт |
| Температурный режим | от -40° до +80° |
| Защита от внешней среды | IP67 |

Рисунок 7 – Контроллер MC-X1
Внешний вид показан на рисунке 8. Новый моноблочный спутниковый приемник специально разработан для компактного решения интеграции с машиной. Приемник GR-i3 принимает сигналы всех существующих на данный момент спутниковых систем таких как GPS, ГЛОНАСС, а также BeiDou и Galileo. Универсальность приемника обеспечивается модульной наращиваемой структурой, необходимой для дальнейшей совместимости с системами LPS и mmGPS. Устройство имеет компактный размер и небольшой вес, что делает его удобным для переноски и использования на местности. Оно также имеет низкое энергопотребление и может работать от встроенного аккумулятора или от внешнего источника питания. Антенна улучшает точность выполняемых работ, может быть использована для управления на расстоянии и улучшении связи. В целом, приемник GR-i3 является надежным и удобным инструментом для работы с глобальными навигационными системами и может быть использован в различных приложениях, связанных с геопозиционированием. Характеристики антенны есть в таблице 7.
Таблица 7 – Характеристики спутниковой антенны
| Наименование | Показатель |
| Количество каналов | 226 универсальных |
| Принимаемые сигналы | GPS; ГЛОНАСС; BeiDou; Galileo, QZSS, SBAS |
| Порты коммуникации | RS-232, CAN open, Ethernet, Digital |
| Каналы связи | BT / BLE |
| Материал корпуса | Магниевый сплав |
| Питание | 9 - 32 Вольт |
| Температурный режим | от -40° до +80° |
| Защита от внешней среды | IP67 |

Рисунок 8 – Спутниковая антенна GR-i3
Внешний вид инерциального датчика представлен на рисунке 9. Система рассчитывает конфигурацию стрелы экскаватора на основе показаний новых инерциальных датчиков TS-i4. TS-i4 — это инерциальный датчик, который измеряет ускорение и угловую скорость движения объекта. Обмен данными происходит на скорости до 500kbps. Эти датчики имеют увеличенную защиту от физических нагрузок и от условий окружающей среды. Датчик TS-i4 имеет высокую надежность и долговечность, что делает его подходящим для использования в различных условиях эксплуатации.
В целом, датчик TS-i4 может быть очень полезным в различных приложениях, где необходимо измерять движение объекта с высокой точностью и быстротой. Он может помочь повысить эффективность работы и улучшить безопасность в различных отраслях промышленности. Характеристики датчика есть в таблице 8.
Таблица 8 – Характеристики инерциального датчика
| Наименование | Показатель |
| Количество осей | 3 |
| Диапазон | 360° |
| Чувствительность | ± 0,01° |
| Протокол | открытый CAN |
| Материал корпуса | Литой алюминий |
| Питание | 9 - 33 Вольт |
| Защита от внешней среды | IP69K |
| Температурный диапазон | -40° С до +85°С |

Рисунок 9 – Инерциальный датчик TS-i4
Антенна предназначена для приема RTK поправок от базовой ГНСС станции, необходимых для получения сантиметровой точности позиционирования 3D системы. Внешний вид показан на рисунке 10.
В зависимости от условий работы могут быть использованы различные частоты, отличные от указанных в основных характеристиках в таблице 9 ниже.
Таблица 9 – Характеристики радиоантенны
| Наименование | Показатель |
| Диапазон | 439-443 Гц |
| Высота с основанием | 350 -400 мм (зависит от частоты) |
| Монтаж | Магнитное основание |
| Температурный диапазон | -40° С до +85°С |

Рисунок 10 – Радиоантенна
Внешний вид представлен на рисунке 11. Электромагнитные клапаны используются в экскаваторах для управления гидравлическими системами. Они позволяют контролировать поток гидравлической жидкости, которая используется для управления движением ковша, руки и других рабочих органов экскаватора. Каждый рабочий орган экскаватора имеет свой собственный электромагнитный клапан, который управляет потоком гидравлической жидкости в этом органе. Например, клапан управления ковшом открывается и закрывается, чтобы контролировать подъем и опускание ковша, а клапан управления рукой экскаватора открывается и закрывается, чтобы контролировать поворот руки. Электромагнитные клапаны в экскаваторах позволяют оператору точно контролировать движения рабочих органов и выполнять работу с высокой точностью. Они также повышают безопасность работы экскаватора, так как позволяют быстро остановить движение рабочих органов в случае необходимости. Кроме того, электромагнитные клапаны в экскаваторах обычно имеют долгий срок службы и надежны в работе. Они могут работать в широком диапазоне температур и условий эксплуатации, что делает их идеальным выбором для использования в тяжелых условиях, в которых работают экскаваторы. Его характеристика представлены в таблице 10.
Таблица 10 – Характеристики электромагнитного клапана
| Наименование | Показатель |
| Габаритные размеры | 35ммх70ммх87мм |
| Напряжение питания | 12В |
| Номинальная мощность | 15Вт |
| Масса | 450г |

Рисунок 11 – Электромагнитный клапан
Джойстики входящие в комплект системы многофункциональны и добавляют достаточно много комфорта к работе оператора. Внешний вид представлен на рисунке 12.
Левый джойстик необходим для управления автоматической системой и может похвастаться несколькими различными функциями. Левый джойстик содержит кнопку для включения "режима ковша" и кнопку клаксона.
Правый джойстик содержит различные кнопки быстрого доступа, которые позволяют оператору экскаватора держать руки на джойстиках. Правый джойстик имеет кнопки "подгон", смещения вверх и вниз. Его характеристики представлены ниже в таблице 11
Таблица 11 – Характеристики джойстиков управления
| Наименование | Показатель |
| Программируемые кнопки | 3 |
| Функции машины | 3 |
| Материал корпуса | ABS пластик |
| Температурный режим | от -30° до +70° |

Рисунок 12 - Джойстики управления JS-1
3 Проектирование, конструирование технических средств
3.1 Выбор контроллера
Контроллер для экскаватора — это компьютерная система, которая управляет работой механизмов экскаватора. Она позволяет машинисту управлять экскаватором с помощью джойстика или пульта управления, а также контролировать все процессы работы машины.
Контроллер включает в себя множество датчиков и электромеханических устройств, которые сообщают ему информацию о положении и работе экскаватора. Это позволяет контроллеру мгновенно реагировать на изменения условий и выполнить нужную операцию.
Контроллер МС-Х1 — это программируемый контроллер, который является одним из наиболее распространенных контроллеров в России. Он используется для автоматизации и управления многими промышленными устройствами и системами.
Автономный контроллер МС-Х1 был выбран по ряду причин. Обладая Wi-Fi каналом связи, он может эксплуатироваться без надобности спутниковой связи. Также возможна связь через сеть Интернет.
Стоит отметить, что контроллеры серии МС являются сборочными, т.е. обладающими съёмными модулями для дополнительных дискретных и аналоговых входов и выходов.
Контроллер измерительный МС-Х1 предназначен для реализации разнообразных алгоритмов автоматизированного управления технологическими процессами.
Контроллер в моей системе выполняет следующие функции:
-
Измерение и преобразование в цифровую форму сигналов, поступающих от аналоговых и дискретных датчиков технологических параметров. -
Формирование дискретных и аналоговых выходных сигналов для воздействия на технологический процесс. -
Реализация алгоритмов функционирования, необходимых для управления конкретными технологическими процессами. -
Вывод информации на дисплей пульта оператора или на экран монитора компьютера, КПК или другого средства через интерфейс RS232C, Ethernet. -
Обеспечение связи через интерфейс RS485 между контроллерами и другими модулями.
Основные особенности контроллера МС-Х1: