Файл: 1. Понятие регулярности полетов ла факторы, влияющие на регулярность вылета.docx
Добавлен: 08.11.2023
Просмотров: 1984
Скачиваний: 25
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
практического потолка.
Условно считают, что практический потолок самолета есть высота, на которой максимальная вертикальная скорость подъема равна 0,5 м/с.
Разница между теоретическим и практическим потолком у современных самолетов невелика и не превышает 200 м. Теоретический и практический потолки можно определить по графику (см. рис. 6).
Современные самолеты при полете с большими скоростями полета обладают настолько большим запасом кинетической энергии что могут использовать его для набора высоты. Причем если самолет летит вблизи практического потолка, то он за счет использования запаса кинетической энергии, сохраняя управляемость, может подняться на высоту, большую его теоретического потолка, даже при отсутствии избытка тяги.
что могут использовать его для набора высоты. Причем если самолет летит вблизи практического потолка, то он за счет использования запаса кинетической энергии, сохраняя управляемость, может подняться на высоту, большую его теоретического потолка, даже при отсутствии избытка тяги.
Рис.7. Подъем самолета на динамический потолок
Максимальная высота, набираемая самолетом за счет запаса кинетической энергии, на которой можно создать скоростной напор, необходимый для сохранения управляемости, называется динамическим потолком.
Если в горизонтальном полете вблизи практического потолка Ннач самолет имеет скорость Vнач и обладает кинетической энергией , то при дополнительном наборе высоты ΔН скорость самолета уменьшится до Vкон =Vэв (минимальная эволютивная скорость, при которой еще сохраняется управляемость) и его кинетическая энергия станет равной
, то при дополнительном наборе высоты ΔН скорость самолета уменьшится до Vкон =Vэв (минимальная эволютивная скорость, при которой еще сохраняется управляемость) и его кинетическая энергия станет равной  но зато самолет приобретет дополнительную потенциальную энергию
но зато самолет приобретет дополнительную потенциальную энергию 
 (12)
(12)
После преобразований получим

или

 (13)
(13)
где Vср - средняя скорость;
ΔV - потеря скорости на горке.
Как видим из формулы, прирост высоты за счет уменьшения скорости на величину ΔV тем больше, чем выше средняя скорость самолета.
Достичь динамического потолка можно следующим образом: на некоторой высоте самолет разгоняется до максимальной скорости и выполняет горку. Перевод самолета на горку достигается увеличением подъемной силы Y.
Маневр нужно начинать с такой высоты, на которой можно получить достаточную для искривления траектории подъемную силу. На практическом потолке из-за малой плотности воздуха полет самолета совершается на больших углах атаки (больших Су) и запас для увеличения Су до Су макс получается очень малым. Поэтому на практическом потолке маневр на горку будет выполняться с очень большим радиусом кривизны траектории. Это приводит к медленному набору высоты, а затем из-за недостатка подъемной силы траектория начнет искривляться вниз. Для набора наибольшей высоты управляемого полета (динамического потолка) разгон самолета и начало маневра целесообразно перенести на меньшие, чем Нпр, высоты. На самолетах больших скоростей разгон и маневр выхода на динамический потолок начинают при М = Мпред на высоте, меньшей практического потолка на 2000 - 4000 м (рис. 7).
Понятие об устойчивости и управляемости самолета.
Любой самолет, поднявшийся в воздух, кроме высоких летно-тактических данных должен быть хорошо уравновешен, быть устойчивым и одновременно хорошо управляемым. Выполнение этих требований - сложная конструктивная задача.
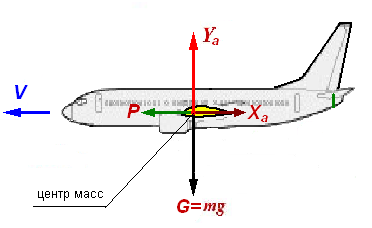
Полет самолета определяется его взаимодействием с другими телами и главным образом с воздухом, обтекающим крыло, фюзеляж, горизонтальное оперение и т. д. При взаимодействии с воздухом возникают внешние аэродинамические силы, которые нагружают самолет и создают моменты сил. Для осуществления различных режимов полета требуется полное или частичное равновесие внешних сил и моментов, действующих на самолет.
Устойчивость характеризует способность самолета без вмешательства летчика сохранять заданный режим полета.
Управляемость - это способность самолета должным образом реагировать на отклонение летчиком рулей управления (рулей высоты, поворота и элеронов).
Между равновесием, устойчивостью и управляемостью существует определенная взаимосвязь. В общем случае движение самолета оказывается весьма сложным, поэтому для удобства анализа его разлагают на простейшие виды: продольное и боковое.
Соответственно с продольным и боковым движением самолета рассматривают:
- продольное и боковое равновесие;
- продольную и боковую устойчивость;
- продольную и боковую управляемость.
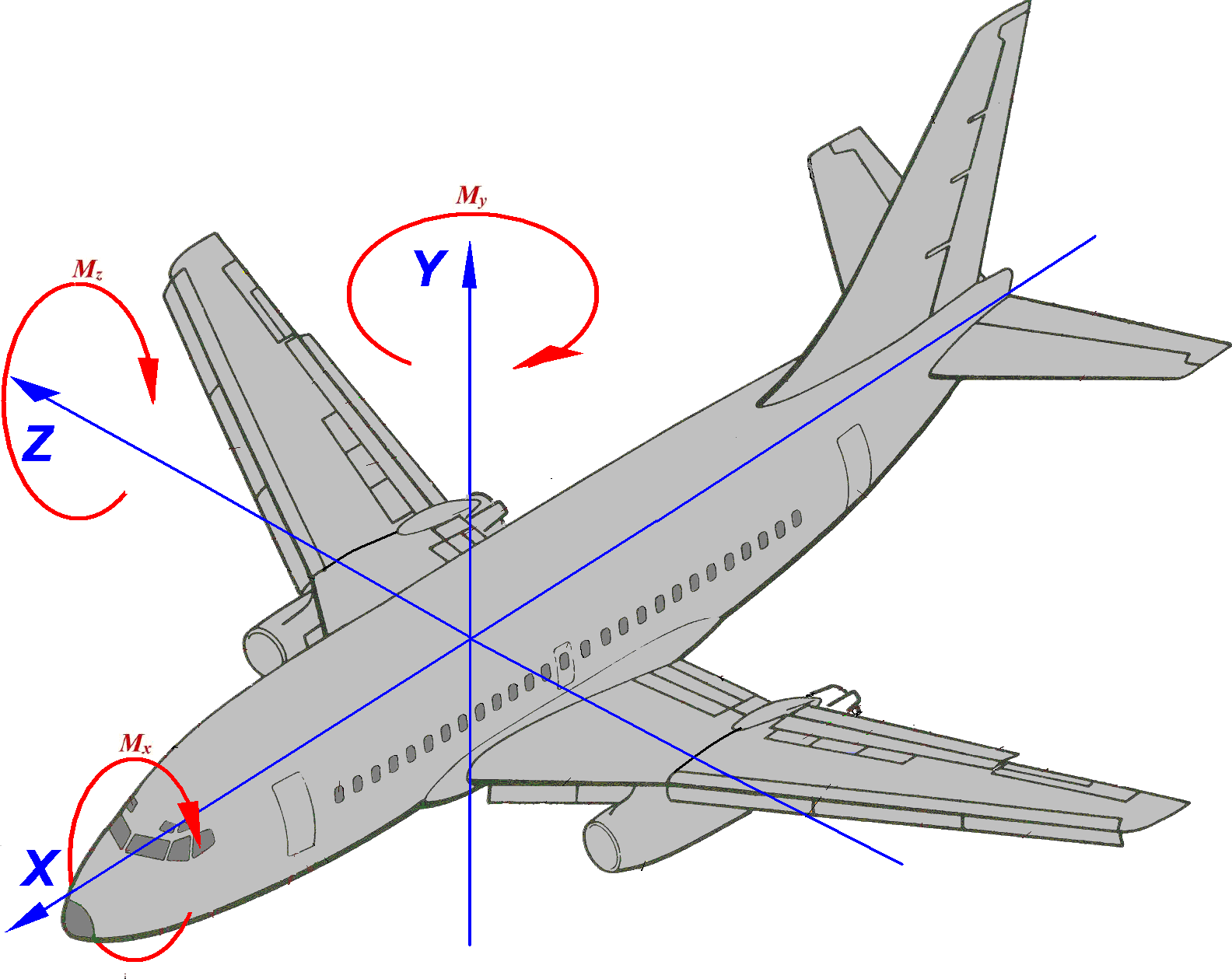
Любое вращение самолета вокруг его центра тяжести можно разложить на вращение вокруг трех взаимно перпендикулярных осей X, У, Z, проходящих через центр тяжести. При изучении устойчивости и управляемости обычно используют связанную систему координат.
В связанной системе координат ось Х1 связана с самолетом, параллельна оси самолета или хорде крыла и находится в плоскости симметрии. Ось У1 находится также в плоскости симметрии, перпендикулярна оси Х1 и направлена вверх. Ось Z перпендикулярна осям Х и У и направлена вдоль правой плоскости.
Соответственно трем осям на самолет действуют следующие моменты.
1. Продольный момент или момент тангажа Mz стремящийся повернуть самолет вокруг оси Z1.
Продольный момент может быть кабрирующим, стремящимся увеличить угол тангажа, или пикирующим, стремящимся уменьшить угол тангажа.
2. Поперечный момент или момент крена Мх, стремящийся повернуть самолет вокруг оси Х
1
3. Путевой момент или момент рысканья My, стремящийся повернуть самолет вокруг оси У1 т. е. изменить курс самолета.
Для балансировки самолета относительно его центра тяжести в установившемся полете, а также для управления самолетом применяются различные аэродинамические рули. На самолетах с обычной схемой управления поворот и балансировка его относительно поперечной оси Z осуществляются рулями высоты (или управляемым стабилизатором). Относительно продольной оси Х самолет балансируется и поворачивается с помощью элеронов, расположенных в задних частях консолей крыла и отклоняющихся на правом и левом крыле в противоположные стороны. В помощь элеронам на скоростных самолетах применяются интерцепторы, которые как бы увеличивают эффективность элеронов.
Относительно оси У самолет балансируется и поворачивается с помощью руля поворота (направления).
Аэродинамический руль представляет собой отклоняющуюся заднюю часть крыла, горизонтального оперения (стабилизатора), вертикального оперения (киля). За счет отклонения руля образуется дополнительная аэродинамическая сила (положительная или отрицательная) на участке несущей поверхности крыла, стабилизатора или киля, которая расположена на соответствующем расстоянии до центра тяжести самолета и создает момент, необходимый для балансировки и управления самолетом относительно его центра тяжести.
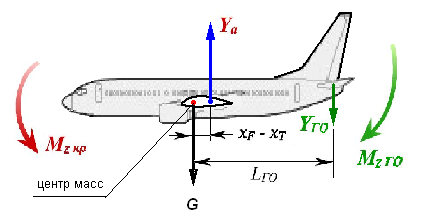
Действие рулей на дозвуковых скоростях полета объясняется тем, что возмущения, вызванные отклонением рулей, распространяются во всех направлениях: по потоку и навстречу потоку. Вследствие этого происходит перераспределение давления по всей длине хорды профиля, в том числе и на неподвижных несущих поверхностях, снабженных рулем. Если, например, отклонить руль высоты вниз, то это вызовет дополнительное разрежение сверху стабилизатора и повышение давления внизу, что и приведет к созданию дополнительной подъемной силы на горизонтальном оперении в целом (подвижной и неподвижной его частей). Дополнительная подъемная сила УГ.О. на горизонтальном оперении создает дополнительный момент относительно центра тяжести, который претворит в практическое действие замысел летчика.
Вес самолета складывается из веса пустого самолета (планер, двигатели, несъемное оборудование), веса топлива, бортприпасов, грузов, экипажа и т. д. Если найти равнодействующую сил веса всех частей самолета, то она пройдет через некоторую точку внутри самолета, называемую центром тяжести (центром масс).
Вопросы 8 раздела.
Компрессор предназначается для сжатия (повышения давления) воздуха, поступающего из воздухозаборника, (что необходимо для осуществления цикла Брайтона) и прокачки его далее по тракту двигателя.
Компрессор, подающий воздух в наружный контур ТРДД (или одновременно в наружный и внутренний контуры), обычно называют вентилятором ТРДД.
Основными типами компрессоров современных авиационных газотурбинных двигателей являются одно- или многоступенчатые осевые компрессоры или осецентробежные компрессоры.
Другие типы компрессоров применяются реже. В мощных ГТД применяются исключительно осевые компрессоры, так как они позволяют обеспечить большой расход воздуха, необходимый мощным двигателям, при минимальных габаритах. В двигателях сравнительно небольших размеров может применяться сочетание нескольких осевых и обычно одной (последней) центробежной ступени. Такой компрессор называется осецентробежным. Его основным преимуществом является возможность обойтись (при необходимой степени повышения давления) меньшим числом степеней, поскольку в центробежной ступени можно обеспечить существенно более высокое повышение давления, чем в осевой. Но габариты компрессора при этом увеличиваются, что для мощных двигателей может оказаться неприемлемым. Осевой компрессор имеет несколько рядов лопаток, насажанных на один общий вращающийся вал, которые образуют ротор компрессора.
Один ряд лопаток ротора (вращающийся лопаточный венец) называется рабочим колесом (РК).
Другой основной частью компрессора является статор, состоящий из нескольких рядов неподвижных лопаток (лопаточных венцов), закрепленных в корпусе.
Условно считают, что практический потолок самолета есть высота, на которой максимальная вертикальная скорость подъема равна 0,5 м/с.
Разница между теоретическим и практическим потолком у современных самолетов невелика и не превышает 200 м. Теоретический и практический потолки можно определить по графику (см. рис. 6).
| | |
Современные самолеты при полете с большими скоростями полета обладают настолько большим запасом кинетической энергии
Рис.7. Подъем самолета на динамический потолок
Максимальная высота, набираемая самолетом за счет запаса кинетической энергии, на которой можно создать скоростной напор, необходимый для сохранения управляемости, называется динамическим потолком.
Если в горизонтальном полете вблизи практического потолка Ннач самолет имеет скорость Vнач и обладает кинетической энергией
После преобразований получим
или
где Vср - средняя скорость;
ΔV - потеря скорости на горке.
Как видим из формулы, прирост высоты за счет уменьшения скорости на величину ΔV тем больше, чем выше средняя скорость самолета.
Достичь динамического потолка можно следующим образом: на некоторой высоте самолет разгоняется до максимальной скорости и выполняет горку. Перевод самолета на горку достигается увеличением подъемной силы Y.
Маневр нужно начинать с такой высоты, на которой можно получить достаточную для искривления траектории подъемную силу. На практическом потолке из-за малой плотности воздуха полет самолета совершается на больших углах атаки (больших Су) и запас для увеличения Су до Су макс получается очень малым. Поэтому на практическом потолке маневр на горку будет выполняться с очень большим радиусом кривизны траектории. Это приводит к медленному набору высоты, а затем из-за недостатка подъемной силы траектория начнет искривляться вниз. Для набора наибольшей высоты управляемого полета (динамического потолка) разгон самолета и начало маневра целесообразно перенести на меньшие, чем Нпр, высоты. На самолетах больших скоростей разгон и маневр выхода на динамический потолок начинают при М = Мпред на высоте, меньшей практического потолка на 2000 - 4000 м (рис. 7).
- 1 2 3 4 5 6 7 8 9 10
Понятие об устойчивости и управляемости самолета.
Любой самолет, поднявшийся в воздух, кроме высоких летно-тактических данных должен быть хорошо уравновешен, быть устойчивым и одновременно хорошо управляемым. Выполнение этих требований - сложная конструктивная задача.
Полет самолета определяется его взаимодействием с другими телами и главным образом с воздухом, обтекающим крыло, фюзеляж, горизонтальное оперение и т. д. При взаимодействии с воздухом возникают внешние аэродинамические силы, которые нагружают самолет и создают моменты сил. Для осуществления различных режимов полета требуется полное или частичное равновесие внешних сил и моментов, действующих на самолет.
Устойчивость характеризует способность самолета без вмешательства летчика сохранять заданный режим полета.
Управляемость - это способность самолета должным образом реагировать на отклонение летчиком рулей управления (рулей высоты, поворота и элеронов).
Между равновесием, устойчивостью и управляемостью существует определенная взаимосвязь. В общем случае движение самолета оказывается весьма сложным, поэтому для удобства анализа его разлагают на простейшие виды: продольное и боковое.
Соответственно с продольным и боковым движением самолета рассматривают:
- продольное и боковое равновесие;
- продольную и боковую устойчивость;
- продольную и боковую управляемость.
Любое вращение самолета вокруг его центра тяжести можно разложить на вращение вокруг трех взаимно перпендикулярных осей X, У, Z, проходящих через центр тяжести. При изучении устойчивости и управляемости обычно используют связанную систему координат.
В связанной системе координат ось Х1 связана с самолетом, параллельна оси самолета или хорде крыла и находится в плоскости симметрии. Ось У1 находится также в плоскости симметрии, перпендикулярна оси Х1 и направлена вверх. Ось Z перпендикулярна осям Х и У и направлена вдоль правой плоскости.
Соответственно трем осям на самолет действуют следующие моменты.
1. Продольный момент или момент тангажа Mz стремящийся повернуть самолет вокруг оси Z1.
Продольный момент может быть кабрирующим, стремящимся увеличить угол тангажа, или пикирующим, стремящимся уменьшить угол тангажа.
2. Поперечный момент или момент крена Мх, стремящийся повернуть самолет вокруг оси Х
1
3. Путевой момент или момент рысканья My, стремящийся повернуть самолет вокруг оси У1 т. е. изменить курс самолета.
Для балансировки самолета относительно его центра тяжести в установившемся полете, а также для управления самолетом применяются различные аэродинамические рули. На самолетах с обычной схемой управления поворот и балансировка его относительно поперечной оси Z осуществляются рулями высоты (или управляемым стабилизатором). Относительно продольной оси Х самолет балансируется и поворачивается с помощью элеронов, расположенных в задних частях консолей крыла и отклоняющихся на правом и левом крыле в противоположные стороны. В помощь элеронам на скоростных самолетах применяются интерцепторы, которые как бы увеличивают эффективность элеронов.
Относительно оси У самолет балансируется и поворачивается с помощью руля поворота (направления).
Аэродинамический руль представляет собой отклоняющуюся заднюю часть крыла, горизонтального оперения (стабилизатора), вертикального оперения (киля). За счет отклонения руля образуется дополнительная аэродинамическая сила (положительная или отрицательная) на участке несущей поверхности крыла, стабилизатора или киля, которая расположена на соответствующем расстоянии до центра тяжести самолета и создает момент, необходимый для балансировки и управления самолетом относительно его центра тяжести.
Действие рулей на дозвуковых скоростях полета объясняется тем, что возмущения, вызванные отклонением рулей, распространяются во всех направлениях: по потоку и навстречу потоку. Вследствие этого происходит перераспределение давления по всей длине хорды профиля, в том числе и на неподвижных несущих поверхностях, снабженных рулем. Если, например, отклонить руль высоты вниз, то это вызовет дополнительное разрежение сверху стабилизатора и повышение давления внизу, что и приведет к созданию дополнительной подъемной силы на горизонтальном оперении в целом (подвижной и неподвижной его частей). Дополнительная подъемная сила УГ.О. на горизонтальном оперении создает дополнительный момент относительно центра тяжести, который претворит в практическое действие замысел летчика.
Вес самолета складывается из веса пустого самолета (планер, двигатели, несъемное оборудование), веса топлива, бортприпасов, грузов, экипажа и т. д. Если найти равнодействующую сил веса всех частей самолета, то она пройдет через некоторую точку внутри самолета, называемую центром тяжести (центром масс).
Вопросы 8 раздела.
-
Назначение, конструкция, неисправности компрессоров авиационных газотурбинных двигателей.
Компрессор предназначается для сжатия (повышения давления) воздуха, поступающего из воздухозаборника, (что необходимо для осуществления цикла Брайтона) и прокачки его далее по тракту двигателя.
Компрессор, подающий воздух в наружный контур ТРДД (или одновременно в наружный и внутренний контуры), обычно называют вентилятором ТРДД.
Основными типами компрессоров современных авиационных газотурбинных двигателей являются одно- или многоступенчатые осевые компрессоры или осецентробежные компрессоры.
Другие типы компрессоров применяются реже. В мощных ГТД применяются исключительно осевые компрессоры, так как они позволяют обеспечить большой расход воздуха, необходимый мощным двигателям, при минимальных габаритах. В двигателях сравнительно небольших размеров может применяться сочетание нескольких осевых и обычно одной (последней) центробежной ступени. Такой компрессор называется осецентробежным. Его основным преимуществом является возможность обойтись (при необходимой степени повышения давления) меньшим числом степеней, поскольку в центробежной ступени можно обеспечить существенно более высокое повышение давления, чем в осевой. Но габариты компрессора при этом увеличиваются, что для мощных двигателей может оказаться неприемлемым. Осевой компрессор имеет несколько рядов лопаток, насажанных на один общий вращающийся вал, которые образуют ротор компрессора.
Один ряд лопаток ротора (вращающийся лопаточный венец) называется рабочим колесом (РК).
Другой основной частью компрессора является статор, состоящий из нескольких рядов неподвижных лопаток (лопаточных венцов), закрепленных в корпусе.