ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 08.11.2023
Просмотров: 146
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
2.2 Решение системы дифференциальных уравнений
4. РАЗРАБОТКА СИСТЕМЫ ДЛЯ ПИТАНИЯ ВЕНТИЛЬНЫХ ДВИГАТЕЛЕЙ
4.1 Обоснование, выбор и описание функциональной схемы электропривода
4.2 Описание и построение структурной схемы электропривода
4.3 Разработка и описание принципиальной электросхемы датчика контроля состояния вентилей
4.4 Разработка и описание принципиальной электросхемы системы импульсно-фазового управления
4.5 Расчет и выбор элементов датчика контроля состояния вентилей
4.6 Расчет и выбор элементов системы импульсно-фазового управления
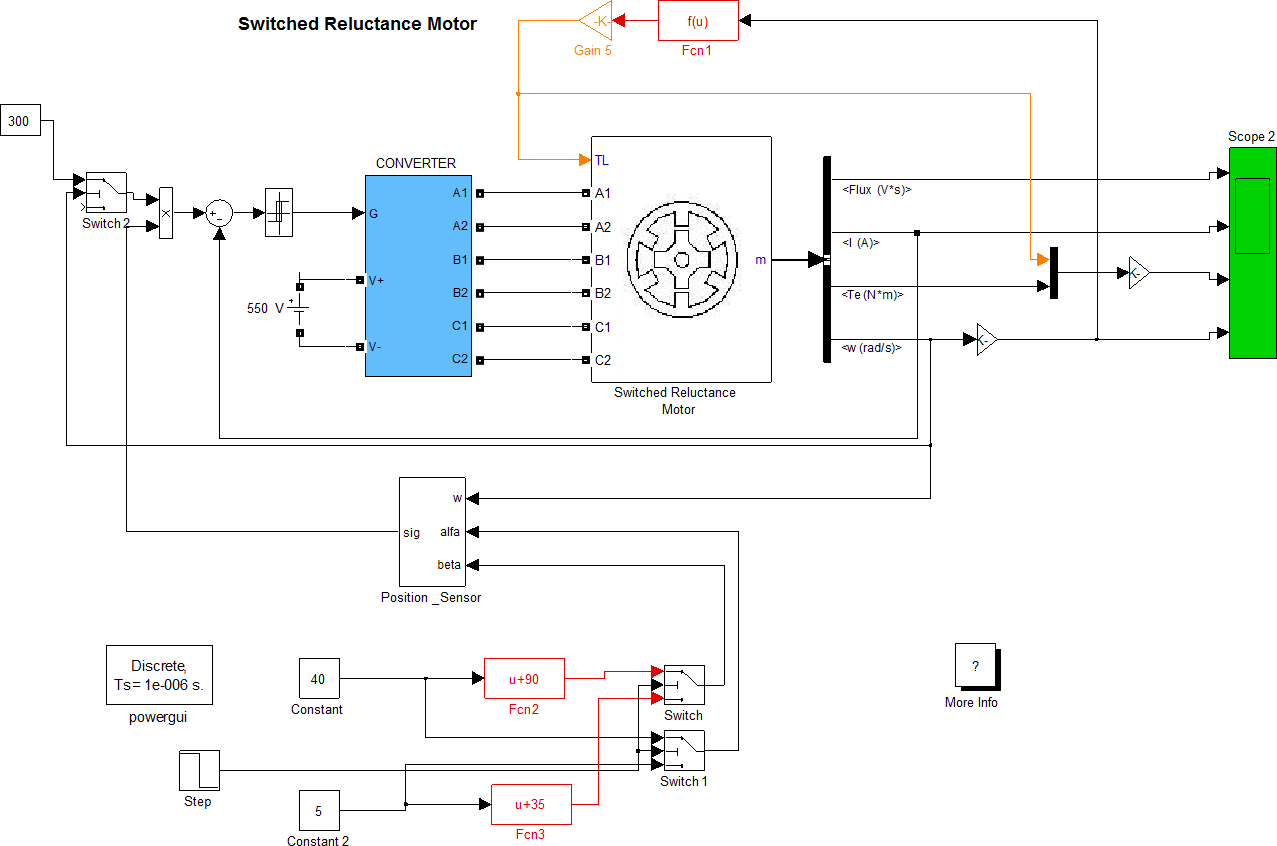
Рисунок 2.4 – Структурная модель вентильно-индукторного двигателя
а) б)
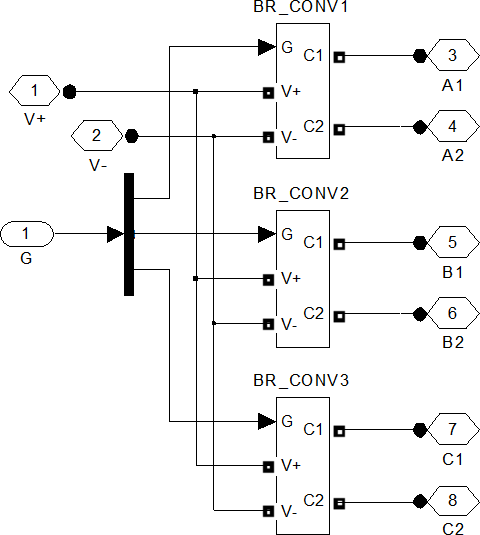
Рисунок 2.5 - Модель блока Converter
Вентильно-индукторный двигатель рассматриваемого типа выполнен на базе трехфазной синхронной машины с постоянными магнитами на роторе.
Трехфазные обмотки статора питаются постоянным током, подаваемым
поочередно в две последовательно соединенные фазные обмотки.
Переключение обмоток производится транзисторным коммутатором,
выполненным по трехфазной мостовой схеме. Транзисторные ключи
открываются и закрываются в зависимости от положения ротора двигателя.
Рисунок 2.6 - Механические характеристики ВИД
Применение модели вентильно-индукторного двигателя позволяет спрогнозировать его поведение.
Далее построим в MATLAB упрощенную модель ВИД.
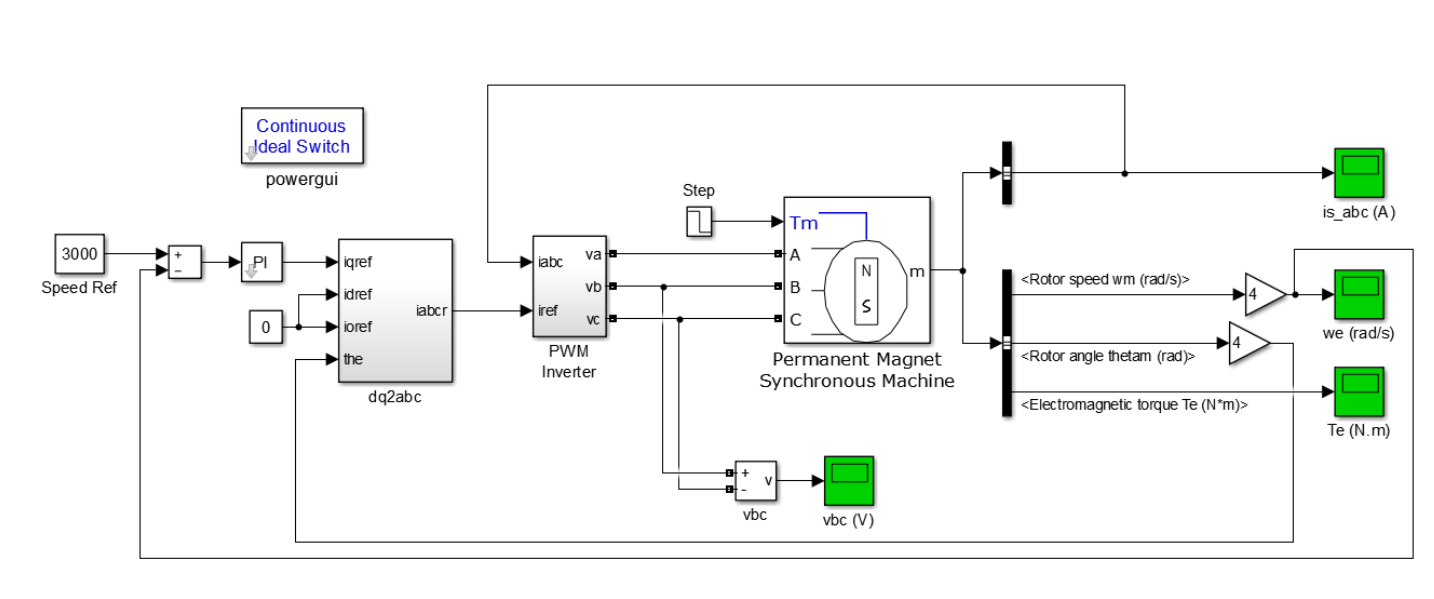
Рисунок 2.7 – Упрощенная модель ВИД
В данной схеме показана работа вентильного двигателя с замкнутым контуром и регулятором тока на двигателе мощностью 13 кВт, 3000 об/мин.
Он питается инвертором PWM. Преобразователь PWM полностью построен со стандартными блоками MatLab Simulink. Его выход проходит через блоки источника контролируемого напряжения, прежде чем применяется к обмоткам статора блока ВИД. Управление ключами инвертора вентильного электродвигателя традиционно выполняется в функции положения его ротора. Высокие эксплуатационные характеристики, достигаемые таким образом, делают ВИД весьма перспективным в диапазоне малых и средних мощностей. Переключение коммутатора ВИД происходит в зависимости от текущего положения ротора. Датчик положения ротора позволяет сохранить угол между потоками постоянным на уровне 90±30°, в таком положении вращающий момент оказывается максимальным. Полупроводниковый коммутатор для питания обмоток статора ВИД – это управляемый полупроводниковый преобразователь с жестким алгоритмом 120° коммутации напряжений или токов трех рабочих фаз.
Используются две петли управления в данной модели. Внутренний контур регулирует токи статора двигателя. Внешняя петля управляет скоростью двигателя.
Вентильный двигатель рассматриваемого типа выполнен на базе трехфазной синхронной машины с постоянными магнитами на роторе.
Трехфазные обмотки статора питаются постоянным током, подаваемым поочередно в две последовательно соединенные фазные обмотки.
Переключение обмоток производится транзисторным коммутатором, выполненным по трехфазной мостовой схеме. Транзисторные ключи открываются и закрываются в зависимости от положения ротора двигателя.
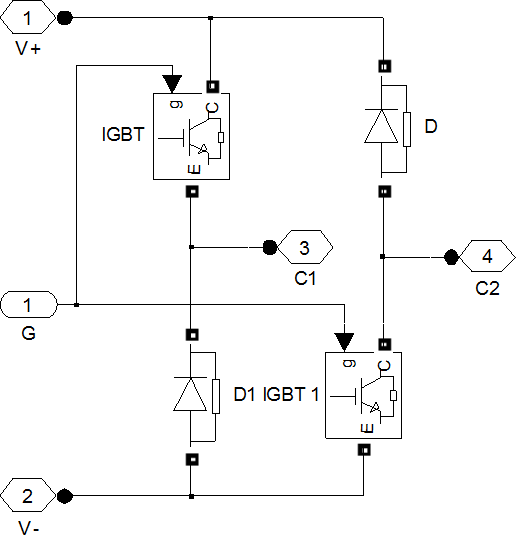
Здесь инвертор с амплитудно-импульсной модуляцией выхода выполнен на IGBT-транзисторах, причем амплитуда регулируется благодаря широтно-импульсной модуляции на промежуточном звене постоянного тока.
Вообще для данной цели используются: тиристорные преобразователи частоты с автономным инвертором напряжения или тока с управлением по питанию и транзисторные преобразователи частоты с автономным инвертором напряжения с управлением в режиме ШИМ или с релейным регулированием тока на выходе.
Однако инерция двигателя в данной модели предотвращает появление шума в форме волны двигателя. Это можно видеть из графиков характеристик скорости и момента, которые представлены на рисунке 2.8 и 2.9 соответственно.
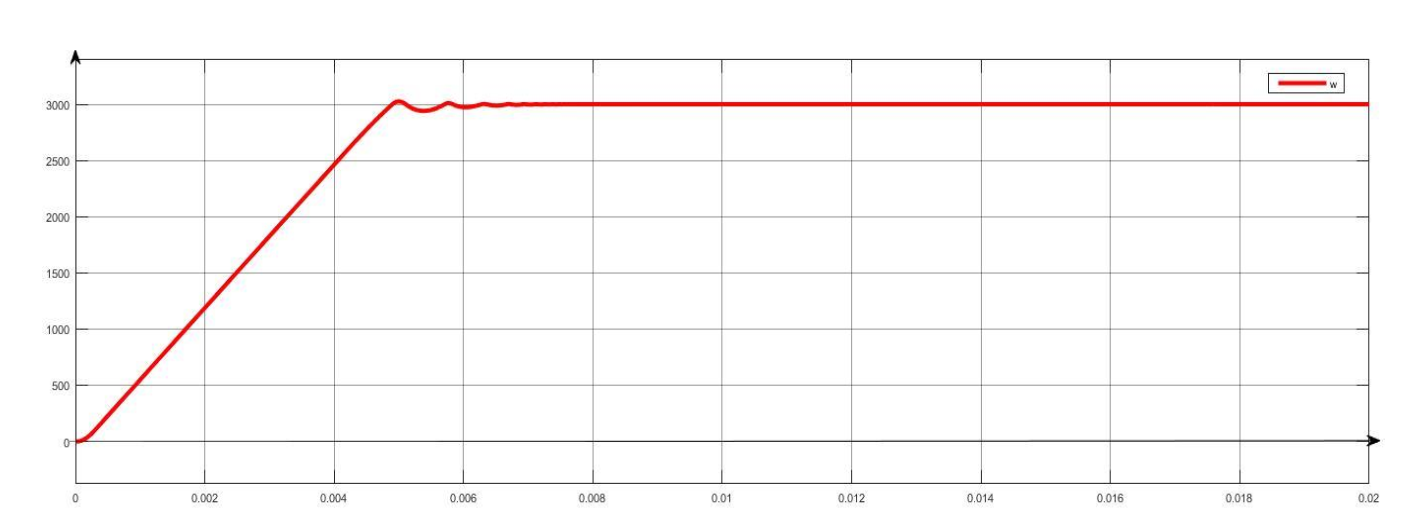
Рисунок 2.8 – График скорости
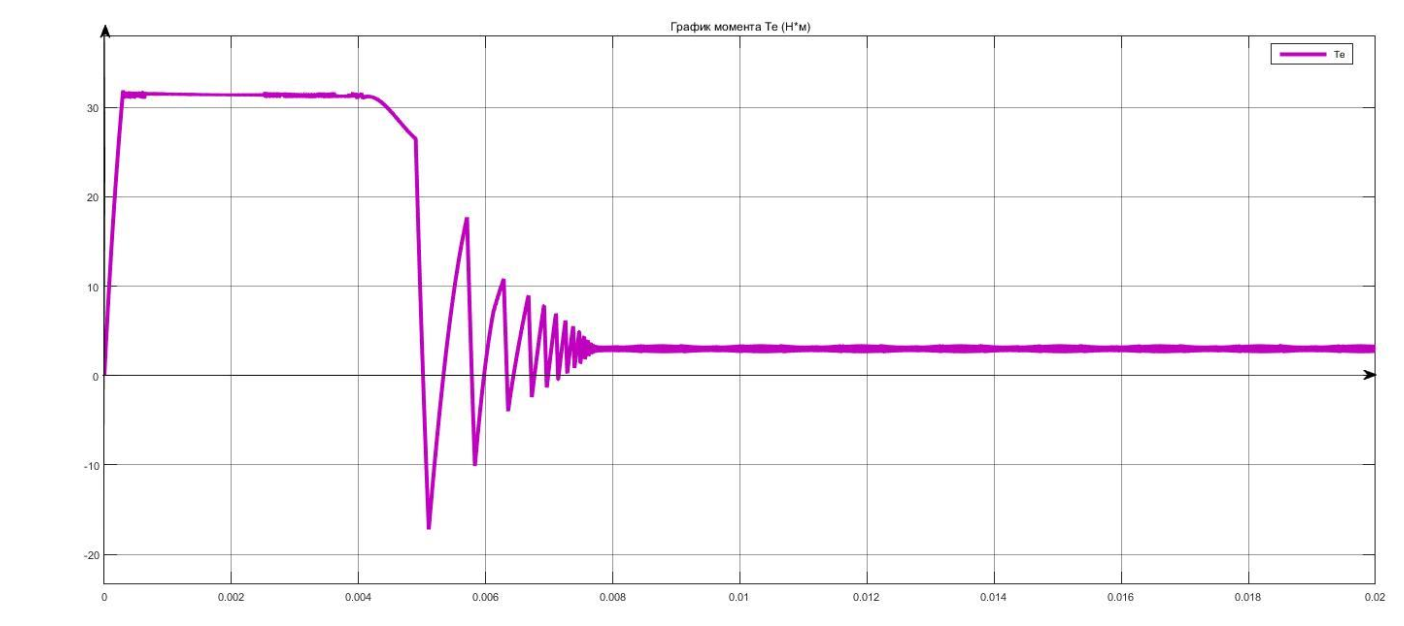
Рисунок 2.9 – График момента
Применение имитационных моделей вентильного двигателя позволяет спрогнозировать поведение двигателя до производства, на этапе проектирования. Такие модели строятся на том, что они копируют качества и характеристики неких реальных систем. Полученные электромеханические характеристики двигателя соответствуют традиционным машинам постоянного тока с магнитоэлектрическим или независимым возбуждением, потому системы управления вентильным двигателем и строятся по классическому принципу подчиненного регулирования координат привода постоянного тока с контурами частоты вращения ротора и тока статора. В данной имитационной модели, видно, что шум, создаваемый инвертором PWM, влияет на момент Te.
Момент, создаваемый двигателем, определяется взаимодействием двух потоков:
- статора, создаваемого током в обмотках статора,
- ротора, создаваемого высокоэнергетическими постоянными магнитами (на основе сплавов самарий-кобальт и других).
Момент в ВИД образуется в результате взаимодействия магнитных потоков статора и ротора: магнитный поток статора все время стремится, как бы развернуть ротор в такое положение, чтобы магнитный поток, установленных на нем постоянных магнитов совпал по направлению с магнитным потоком статора.
Наибольший момент, создаваемый на валу ротора, будет при угле между векторами потоков равным π/2 и будет уменьшаться до нуля по мере сближения векторов потоков.
После пуска вентильный двигатель разгоняется до скорости 3000 об/мин и выходит на режим нормальной работы за время t=0.008с. В это же время момент колеблется в диапазоне от 30Нм до -15Нм и выходит на нормальную работу с моментом Te=4 Нм. Такая работа двигателя, смоделированная в среде MatLab, помогает снять необходимые характеристики до его проектирования на практике.
Далее будем сравнивать асинхронный двигатель с вентильно-индукторным. Для этого необходимо выполнить моделирование асинхронного двигателя и сравнить характеристики с ВИД.
В асинхронных двигателях трехфазное напряжение питания создает
вращающееся магнитное поле в воздушном зазоре, которое взаимодействует с током, протекающим в короткозамкнутой обмотке ротора под действием наведенной ЭДС. Вращающееся магнитное поле в ВИД взаимодействует с ротором, имеющим явную магнитную асимметрию по расточке статора по эквивалентным осям d и q.
В асинхронных двигателях момент на валу пропорционален электрическим потерям в роторе, поэтому температура нагрева обмоток ротора и статора близка к максимально допустимой температуре изоляции обмотки статора. В ВИД ротор практически холодный, тепловая нагрузка двигателя определяется электрическими потерями в обмотке статора. Для повышения энергетических показателей в обоих видах двигателей воздушный зазор выбирается минимально возможным и ограничивается уровнем технологии и условиями эксплуатации.
Построим модель асинхронного двигателя. Для этого воспользуемся следующими блоками: (подраздел Electrical
Sources) Three-Phase Source; (Measurements) Three-Phase V-I Measurement; (Elements) Three-Phase Breaker; (Machines) Asynchronous Machine SI Units; (Simulink) Step.
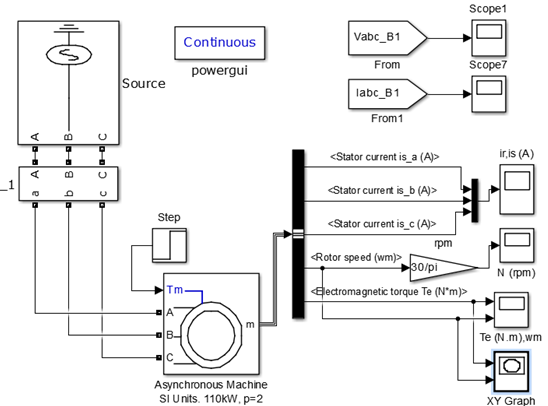
Рисунок 2.10 – Модель асинхронного двигателя
Результаты моделирования переходного процесса при пуске и
набросе номинальной нагрузки представлены на рис. 2.11.
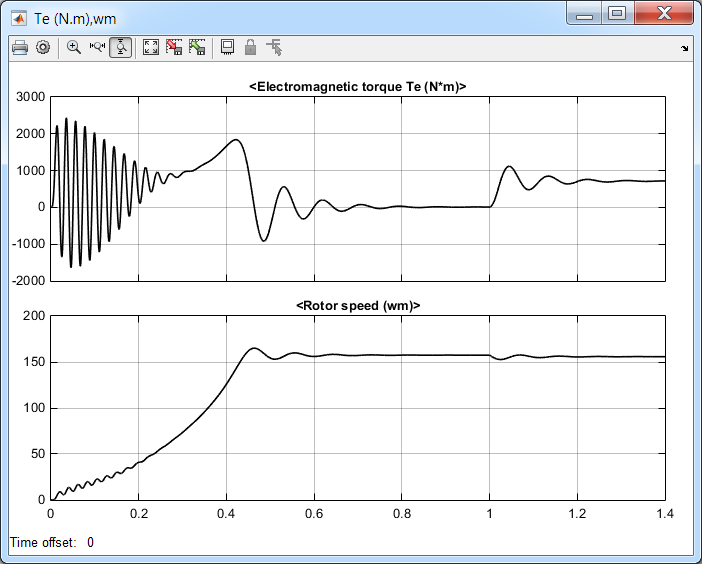
Рисунок 2.11 – Результат моделирования
Приведем графики сравнения двигателей.
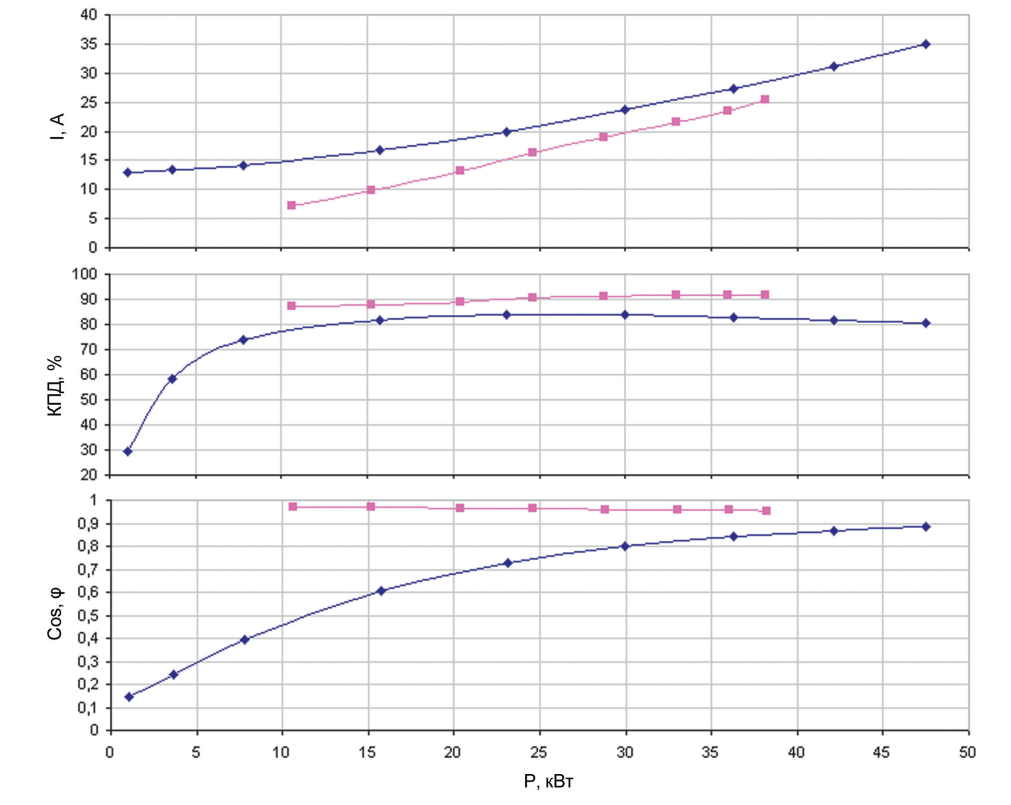
Рисунок 2.12 – Сравнение синяя линия асинхронный, розовая - ВИД
Таким образом, вентильно-индукторный двигатель в сравнении с асинхронным имеет ряд преимуществ. Это видно по построенным графикам. Сравнение приведенных характеристик двигателей, смоделированных в МАТЛАБ, показывает, что ВИД является наиболее эффективным в сравнении с асинхронным двигателем, имеющим повышенное число пар полюсов (2p 4 и более).
Достоинства вентильно-индукторного двигателя определяются простой технологичной конструкцией (прямые зубцы на статоре, катушечные обмотки, зубчатый безобмоточный ротор); отсутствием тепловых потерь в роторе; наличием коэффициента электромагнитной редукции; минимальным моментом инерции ротора; отсутствием «реакции якоря» и остаточного момента при обесточенных обмотках; высоконадежными схемами вентильных коммутаторов и низкой трудоемкостью изготовления.
-
Режимы работы вентильного электропривода
Для начала построим структурную схему двигателя (рис. 2.13).
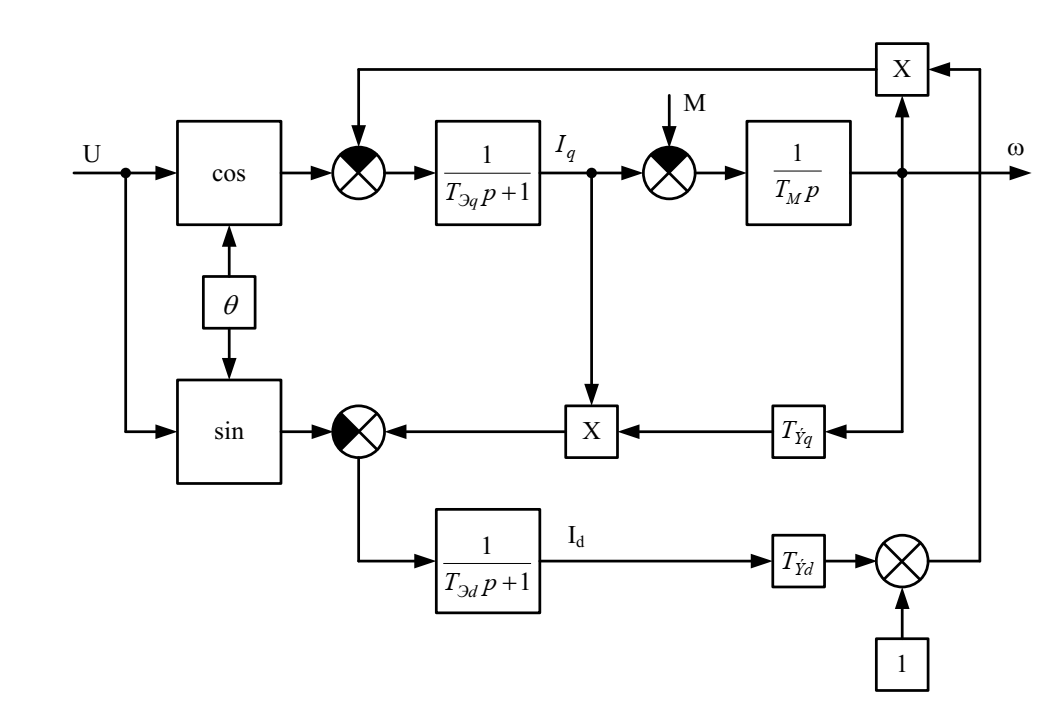
Рисунок 2.13 – Структурная схема вентильного двигателя в осях d-q
с учетом значения угла установки θ
Функциональная схема системы управления ВД принимает вид
рис. 2.14 [7]. Она выполнена на основе автономного инвертора
напряжения (АИ). Схема построена по структуре подчиненного
регулирования с контурами регулирования токов во вращающейся
системе координат d-q и регуляторами этих токов РТq и РТd, контуром
проекции d потока Ф с регулятором РФd и контуром скорости с
регулятором РС.
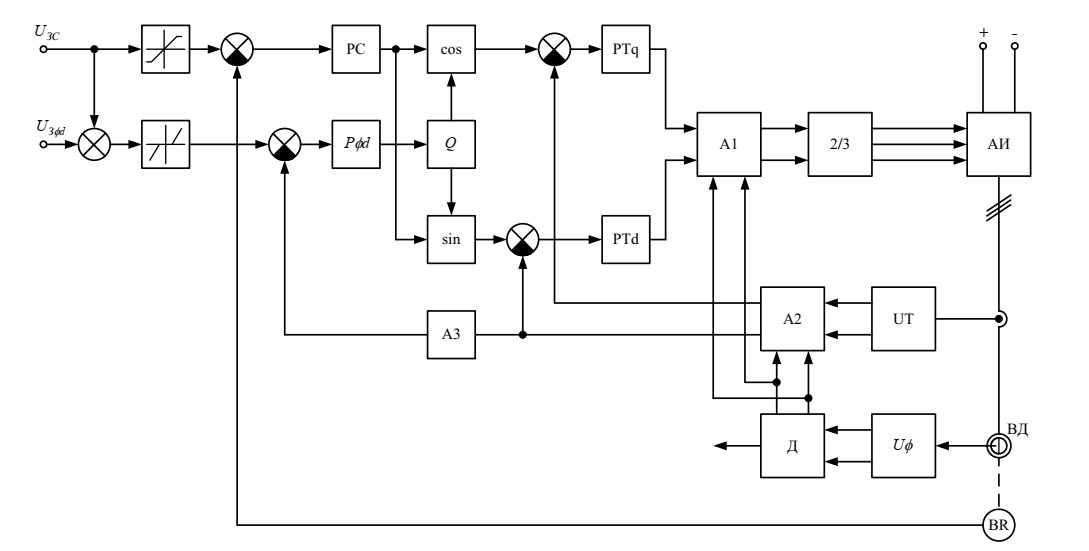
Рисунок 2.14 – Функциональная схема управления ВИД
Контроль тока статора ВИД осуществляет датчик-преобразователь тока
UT, который измеряет мгновенные значения фазных токов в двух фазах А
и В и выдает пропорциональные им сигналы.
Датчик потока φ0 построен на основе элементов Холла, которые
размещаются в воздушном зазоре двигателя, и измеряет мгновенные
значения проекций φ0 в тех же фазах А и В. Здесь же эти сигналы
преобразуются в проекции координат α-β.
Сигналы U φα и U φβ поступают в узел Д, где определяется угол ϕ
между вектором потока φ0 и неподвижными осями статора α-β,
необходимый для перехода к вращающимся координатам d-q.
Вычисленные сигналы токов в проекциях d-q поступают в виде
обратных связей на соответствующие регуляторы РТq и РТd. Выходы этих
регуляторов подключены ко входу модуля А2, где происходит обратное
преобразование в неподвижную систему координат.
На основании функциональной схемы составлена структурная (рис. 2.15). Автономный инвертор напряжения принимается безынерционным.
Отмечается [5], что составляющая φd ослабляет поток, участвующий в создании момента M д . Поэтому по аналогии с двигателем постоянного тока это дает возможность двухзонного регулирования ВИД.
Силовая цепь инвертора напряжения подключается непосредственно к автономному источнику электроэнергии (аккумулятору). Это позволяет реализовать энергоэффективное управление электроприводом ВИД за счет режима рекуперации. Это достаточно просто реализуется при управлении с участием φd за счет деформации механических характеристик.