ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 09.11.2023
Просмотров: 399
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
2/p ≥ 10, без заметной погрешности можно принять ξ = 1.
Коэффициент проводимости скоса, учитывающий влияние на ЭДС обмотки ротора скоса пазов,
 , (9.182)
, (9.182)
где βск — скос пазов, выраженный в зубцовых делениях ротора. При скосе пазов на одно зубцовое деление ротора βск = 1; kμ — коэффициент насыщения магнитной цепи (по 9.129).
Приведенное к числу витков обмотки статора индуктивное сопротивление обмотки короткозамкнутого ротора
х'2 = х2 γ12 (9.183)
где v12 — по (9.172).
Сопротивление схемы замещения rμ (см. рис. 9.47, а) является расчетным. Введением его в схему замещения учитывают влияние потерь в стали статора на процессы в асинхронной машине, поэтому значение сопротивления rμ должно быть принято таким, чтобы выделяющаяся в нем активная мощность была равна мощности, затрачиваемой на потери в стали в реальной машине и отнесенной к одной фазе. Таким образом, rμ = РСТ/(m I20a ), так как активные потери в стали определяются активной составляющей тока холостого хода ,I0а. Из схемы замещения rμ = где
где  .
.
Сопротивление взаимной индукции обмоток статора и ротора xμ по схеме замещения может быть определено как xμ = Е1\Iμ.
В расчетной практике параллельное включение сопротивлений rμ и хμ оказалось удобнее заменить последовательно включенными сопротивлениями r12 и х12 (см. рис. 9.47, 6), значения которых определяют из условия
откуда
 и
и 
Так как в асинхронных машинах rμ ≤ xμ, то х12 ≈ хμ, а r12 << х12. В связи с этим значение r1 не играет заметной роли при анализе процессов в машине, и в расчетах им часто пренебрегают.
Сопротивления r1 и х12 с достаточной для обычных расчетов точностью определяют по следующим формулам:
r12 = Pcт.осн / (m I2μ) ; (9.184)
 (9.185)
(9.185)
9.10.4. Относительные значения параметров
Для удобства сопоставления параметров отдельных машин и упрощения расчета характеристик параметры асинхронных машин выражают в относительных единицах, принимая за базисные значения номинальное фазное напряжение и номинальный фазный ток статора.
Значения параметров, выраженные в относительных единицах, отмечают звездочкой:
(9.186)
Относительные значения одних и тех же параметров схемы замещения различных асинхронных двигателей нормального исполнении незначительно отличаются друг от друга.
Так, относительные значения индуктивных сопротивлений рассеяния обмотки статора и приведенного сопротивления обмотки ротора большей частью находятся в пределах х1 = 0,08...0,14 и х'2 = 0,1...0,16.
Относительные значения сопротивлений взаимной, индукции, как правило, в 30—40 раз больше, чем x1*. Обычно х12* = 2...4.
Относительные значения активных сопротивлений обмотки статора и приведенного сопротивления обмотки ротора близки друг к другу и обычно составляют несколько сотых долей: r1* ≈ r'2* ≈ 0,02... 0,03; лишь, в машинах малой мощности их значения несколько увеличиваются.
Сопротивление r12* обычно составляет 0,05...0,2.
9.11. ПОТЕРИ И КПД
Потери в асинхронных машинах подразделяют на потери в стали (основные и добавочные), электрические, вентиляционные, механические и добавочные при нагрузке.
Основные потери в стали в асинхронных двигателях рассчитывают только в сердечнике статора, так как частота перемагничивания ротора, равная f2 = s f1, в режимах, близких к номинальному, очень мала и потери в стали ротора даже при больших индукциях незначительны [6].
В пусковых режимахf2 близка к f1 и потери в стали ротора соответственно возрастают, однако при расчете пусковых характеристик потери находят только для определения нагрева ротора за время пуска. Наибольшими потерями в пусковых режимах являются электрические потери в обмотках. Они во много раз превышают потери номинального режима, поэтому пренебрежение потерями в стали ротора при больших скольжениях не вносит сколько-нибудь заметной погрешности в расчет.
Основные потери в стали статоров асинхронных машин определяют в соответствии с (6.4) по следующей формуле:
Рст.осн = р1,0/50 (9.187)
(9.187)
где p1,0/50 — удельные потери (табл. 9.28) при индукции 1 Тл и частоте перемагничивания 50 Гц; β — показатель степени, учитывающий зависимость потерь в стали от частоты перемагничивания; для большинства электротехнических сталей β = 1,3...1,5; kда и kдz —коэффициенты, учитывающие влияние на потери в стали неравномерности распределения потока по сечениям участков магнитопровода и технологических факторов. Для машин мощностью меньше 250 кВт приближенно можно принять k
да = l,6 и kдz = 1,8; для машин большей мощности kда = 1,4 и kдz = 1,7; Ва и Вz1ср— индукция в ярме и средняя индукция в зубцах статора, Тл; mа, mz1 — масса стали ярма и зубцов статора, кг:
ma = π(Da - ha) halст1kc1 γc ; (9.188)
mz1 = hz1bz1срZ1 lст1kc1 γc ; (9.189)
hа — высота ярма статора, м:
hа = 0,5(Da - D) – hп1 ;
hz1 — расчетная высота зубца статора, м; bz1ср — средняя ширина зубца статора, м:
bz1ср = (bz1max + bz1min)/ 2 ;
γс — удельная масса стали; в расчетах принимают γс = 7,8 • 103 кг/м3.
Таблица 9.28. Удельные потери в стали, Вт/кг, толщиной 0,5 мм
при индукции В = 1 Тл и частоте перемагничивания f = 50 Гц
Добавочные потери в стали (добавочные потери холостого хода) подразделяют на поверхностные (потери в поверхностном слое коронок зубцов статора и ротора от пульсаций индукции в воздушном зазоре) и пульсационные потери в стали зубцов (от пульсации индукции в зубцах).
Для определения поверхностных потерь вначале находят амплитуду пульсации индукции в воздушном зазоре над коронками зубцов статора и ротора (рис. 9.53, а), Тл:
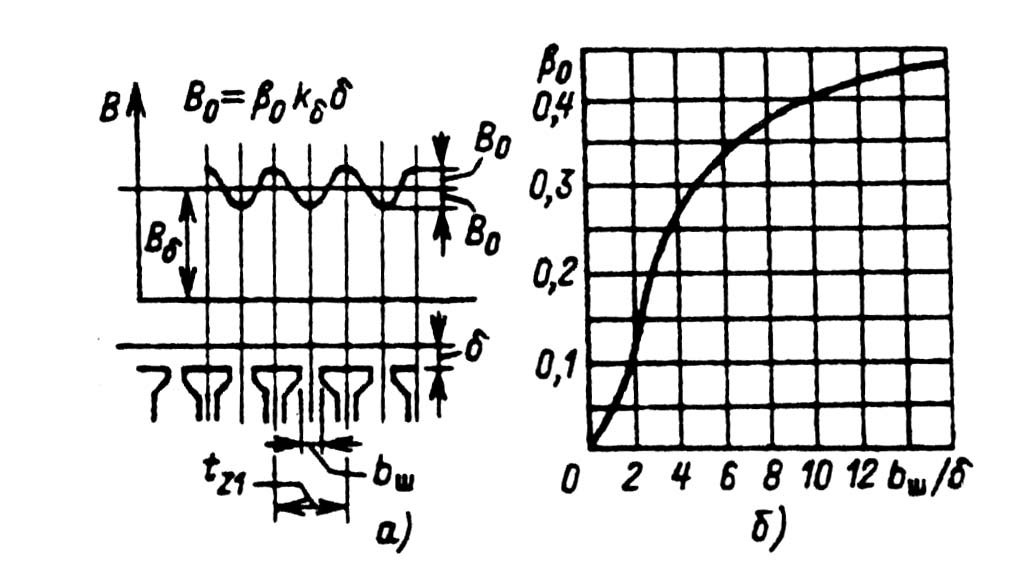
Рис. 9.53. К расчету поверхностных потерь в асинхронных машинах:
а — пульсация индукции в воздушном зазоре
;
б — зависимость β0 =f/(bш / S)
B01(2) = β01(2)kδBδ. (9.190)
Для зубцов статора β01 зависит от отношения ширины шлица пазов ротора к воздушному зазору: β01 = f(bш2 / δ); для зубцов ротора — от отношения ширины шлица пазов статора к воздушному зазору: β02 =f(bш1 / δ) . Зависимость β0 =f(bш / δ) приведена на рис. 9.53, б.
По В0 и частоте пульсаций индукции над зубцами, равной Z2n для статора и Z1n для ротора, рассчитывают удельные поверхностные потери, т. е. потери, приходящиеся на 1м2 поверхности головок статора и ротора:
для статора
Рпов1 = 0,5 k01 (9.191)
(9.191)
для ротора
Рпов2 = 0,5 k02 (9.192)
(9.192)
В этих выражениях k01(02) — коэффициент, учитывающий влияние обработки поверхности головок зубцов статора (ротора) на удельные потери; если поверхность не обрабатывается (двигатели мощностью до 160 кВт, сердечники статоров которых шихтуют на цилиндрические оправки), то k01(02) = 1,4...1,8, при шлифованных поверхностях (наружная поверхность роторов машин средней и большой мощности и внутренняя поверхность статора двигателей Р2 > 160 кВт) k01(02) = 1,7...2,0; n = nc (1 - s) ≈ nc — частота вращения двигателя, об/мин.
Полные поверхностные потери статора, Вт,
Рпов.1 = pпов.1 (tz1 – bш1) Z1lст1. (9.193)
Полные поверхностные потери ротора, Вт,
Рпов2 =pпов2(tz2 - bш2)Z2lcт2. (9.194)
Для определения пульсационных потерь вначале находится амплитуда пульсаций индукции в среднем сечении зубцов Впул, Тл:
для зубцов статора
Впул1 = (9.195)
(9.195)
для зубцов ротора
Впул2 = (9.196)
(9.196)
В этих формулах Bz1cp и Bz2cp — средние индукции в зубцах статора и ротора, Тл:
 (9.197)
(9.197)
При открытых пазах на статоре или на роторе при определении γ1 и γ2 в (9.197) вместо bш1 или bш2 подставляют расчетную ширину раскрытия паза, равную:
Коэффициент проводимости скоса, учитывающий влияние на ЭДС обмотки ротора скоса пазов,
, (9.182)где βск — скос пазов, выраженный в зубцовых делениях ротора. При скосе пазов на одно зубцовое деление ротора βск = 1; kμ — коэффициент насыщения магнитной цепи (по 9.129).
Приведенное к числу витков обмотки статора индуктивное сопротивление обмотки короткозамкнутого ротора
х'2 = х2 γ12 (9.183)
где v12 — по (9.172).
Сопротивление схемы замещения rμ (см. рис. 9.47, а) является расчетным. Введением его в схему замещения учитывают влияние потерь в стали статора на процессы в асинхронной машине, поэтому значение сопротивления rμ должно быть принято таким, чтобы выделяющаяся в нем активная мощность была равна мощности, затрачиваемой на потери в стали в реальной машине и отнесенной к одной фазе. Таким образом, rμ = РСТ/(m I20a ), так как активные потери в стали определяются активной составляющей тока холостого хода ,I0а. Из схемы замещения rμ =
где .Сопротивление взаимной индукции обмоток статора и ротора xμ по схеме замещения может быть определено как xμ = Е1\Iμ.
В расчетной практике параллельное включение сопротивлений rμ и хμ оказалось удобнее заменить последовательно включенными сопротивлениями r12 и х12 (см. рис. 9.47, 6), значения которых определяют из условия
откуда
и Так как в асинхронных машинах rμ ≤ xμ, то х12 ≈ хμ, а r12 << х12. В связи с этим значение r1 не играет заметной роли при анализе процессов в машине, и в расчетах им часто пренебрегают.
Сопротивления r1 и х12 с достаточной для обычных расчетов точностью определяют по следующим формулам:
r12 = Pcт.осн / (m I2μ) ; (9.184)
(9.185)9.10.4. Относительные значения параметров
Для удобства сопоставления параметров отдельных машин и упрощения расчета характеристик параметры асинхронных машин выражают в относительных единицах, принимая за базисные значения номинальное фазное напряжение и номинальный фазный ток статора.
Значения параметров, выраженные в относительных единицах, отмечают звездочкой:
(9.186)
Относительные значения одних и тех же параметров схемы замещения различных асинхронных двигателей нормального исполнении незначительно отличаются друг от друга.
Так, относительные значения индуктивных сопротивлений рассеяния обмотки статора и приведенного сопротивления обмотки ротора большей частью находятся в пределах х1 = 0,08...0,14 и х'2 = 0,1...0,16.
Относительные значения сопротивлений взаимной, индукции, как правило, в 30—40 раз больше, чем x1*. Обычно х12* = 2...4.
Относительные значения активных сопротивлений обмотки статора и приведенного сопротивления обмотки ротора близки друг к другу и обычно составляют несколько сотых долей: r1* ≈ r'2* ≈ 0,02... 0,03; лишь, в машинах малой мощности их значения несколько увеличиваются.
Сопротивление r12* обычно составляет 0,05...0,2.
9.11. ПОТЕРИ И КПД
Потери в асинхронных машинах подразделяют на потери в стали (основные и добавочные), электрические, вентиляционные, механические и добавочные при нагрузке.
Основные потери в стали в асинхронных двигателях рассчитывают только в сердечнике статора, так как частота перемагничивания ротора, равная f2 = s f1, в режимах, близких к номинальному, очень мала и потери в стали ротора даже при больших индукциях незначительны [6].
В пусковых режимахf2 близка к f1 и потери в стали ротора соответственно возрастают, однако при расчете пусковых характеристик потери находят только для определения нагрева ротора за время пуска. Наибольшими потерями в пусковых режимах являются электрические потери в обмотках. Они во много раз превышают потери номинального режима, поэтому пренебрежение потерями в стали ротора при больших скольжениях не вносит сколько-нибудь заметной погрешности в расчет.
Основные потери в стали статоров асинхронных машин определяют в соответствии с (6.4) по следующей формуле:
Рст.осн = р1,0/50
(9.187)где p1,0/50 — удельные потери (табл. 9.28) при индукции 1 Тл и частоте перемагничивания 50 Гц; β — показатель степени, учитывающий зависимость потерь в стали от частоты перемагничивания; для большинства электротехнических сталей β = 1,3...1,5; kда и kдz —коэффициенты, учитывающие влияние на потери в стали неравномерности распределения потока по сечениям участков магнитопровода и технологических факторов. Для машин мощностью меньше 250 кВт приближенно можно принять k
да = l,6 и kдz = 1,8; для машин большей мощности kда = 1,4 и kдz = 1,7; Ва и Вz1ср— индукция в ярме и средняя индукция в зубцах статора, Тл; mа, mz1 — масса стали ярма и зубцов статора, кг:
ma = π(Da - ha) halст1kc1 γc ; (9.188)
mz1 = hz1bz1срZ1 lст1kc1 γc ; (9.189)
hа — высота ярма статора, м:
hа = 0,5(Da - D) – hп1 ;
hz1 — расчетная высота зубца статора, м; bz1ср — средняя ширина зубца статора, м:
bz1ср = (bz1max + bz1min)/ 2 ;
γс — удельная масса стали; в расчетах принимают γс = 7,8 • 103 кг/м3.
Таблица 9.28. Удельные потери в стали, Вт/кг, толщиной 0,5 мм
при индукции В = 1 Тл и частоте перемагничивания f = 50 Гц
| Марка стали | Удельные потери, Вт/кг | Марка стали | Удельные потери, Вт/кг |
| 2013 | 2,5 | 2312 | 1,75 |
| 2212 | 2,2 | 2412 | 1,3 |
| 2214 | 2 | | |
Добавочные потери в стали (добавочные потери холостого хода) подразделяют на поверхностные (потери в поверхностном слое коронок зубцов статора и ротора от пульсаций индукции в воздушном зазоре) и пульсационные потери в стали зубцов (от пульсации индукции в зубцах).
Для определения поверхностных потерь вначале находят амплитуду пульсации индукции в воздушном зазоре над коронками зубцов статора и ротора (рис. 9.53, а), Тл:
Рис. 9.53. К расчету поверхностных потерь в асинхронных машинах:
а — пульсация индукции в воздушном зазоре
;
б — зависимость β0 =f/(bш / S)
B01(2) = β01(2)kδBδ. (9.190)
Для зубцов статора β01 зависит от отношения ширины шлица пазов ротора к воздушному зазору: β01 = f(bш2 / δ); для зубцов ротора — от отношения ширины шлица пазов статора к воздушному зазору: β02 =f(bш1 / δ) . Зависимость β0 =f(bш / δ) приведена на рис. 9.53, б.
По В0 и частоте пульсаций индукции над зубцами, равной Z2n для статора и Z1n для ротора, рассчитывают удельные поверхностные потери, т. е. потери, приходящиеся на 1м2 поверхности головок статора и ротора:
для статора
Рпов1 = 0,5 k01
(9.191)для ротора
Рпов2 = 0,5 k02
(9.192)В этих выражениях k01(02) — коэффициент, учитывающий влияние обработки поверхности головок зубцов статора (ротора) на удельные потери; если поверхность не обрабатывается (двигатели мощностью до 160 кВт, сердечники статоров которых шихтуют на цилиндрические оправки), то k01(02) = 1,4...1,8, при шлифованных поверхностях (наружная поверхность роторов машин средней и большой мощности и внутренняя поверхность статора двигателей Р2 > 160 кВт) k01(02) = 1,7...2,0; n = nc (1 - s) ≈ nc — частота вращения двигателя, об/мин.
Полные поверхностные потери статора, Вт,
Рпов.1 = pпов.1 (tz1 – bш1) Z1lст1. (9.193)
Полные поверхностные потери ротора, Вт,
Рпов2 =pпов2(tz2 - bш2)Z2lcт2. (9.194)
Для определения пульсационных потерь вначале находится амплитуда пульсаций индукции в среднем сечении зубцов Впул, Тл:
для зубцов статора
Впул1 =
(9.195)для зубцов ротора
Впул2 =
(9.196)В этих формулах Bz1cp и Bz2cp — средние индукции в зубцах статора и ротора, Тл:
(9.197)При открытых пазах на статоре или на роторе при определении γ1 и γ2 в (9.197) вместо bш1 или bш2 подставляют расчетную ширину раскрытия паза, равную: