ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 09.11.2023
Просмотров: 394
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
2 ≥ 2...3 кВт. При этих же условиях с1p ≈ 0 и с1a = с1.
Рабочие характеристики можно рассчитать по круговой диаграмме или аналитическим методом. Расчет по круговой диаграмме более нагляден, но менее точен, так как требует графических построений, снижающих точность расчета. Аналитический метод более универсален, позволяет учитывать изменение отдельных параметров при различных скольжениях и может быть легко переведен на язык программ при использовании в расчетах ЭВМ.
Аналитический метод расчета. В настоящее время практически все расчеты проводят аналитическим методом. Формулы для расчета рабочих характеристик приведены в табл. 9.28 в удобной для ручного счета последовательности. Расчет характеристик проводят, задаваясь значениями скольжений в диапазоне s ≈ (0,2...1,5) sном. Номинальное скольжение можно предварительно взять при sном ≈ . Для построения характеристик достаточно рассчитать значения требуемых величин для пяти - шести различных скольжений, выбранных в указанном диапазоне примерно через равные интервалы (см. пример расчета).
. Для построения характеристик достаточно рассчитать значения требуемых величин для пяти - шести различных скольжений, выбранных в указанном диапазоне примерно через равные интервалы (см. пример расчета).
Перед началом расчета рекомендуется выписать значения постоянных, не зависящих от скольжения величин, как это показано в формуляре и в примере расчета. К таким величинам относятся номинальное напряжение фазы U1ном, сопротивления r1 и , сумма потерь Pcт + Pмех (для двигателей с фазным ротором также Ртр.щ) и составляющие тока синхронного холостого хода: реактивная I0р ≈ Iμ и активная, которую определяют из выражения
 , (9.226)
, (9.226)
Выписывается также значение коэффициента с1, определенное по (9.223) или по (9.225), и расчетные величины, обозначенные в формуляре а, а', b и b' . Формулы для их определения зависят от принятого (точного или приближенного) метода расчета с1.
Если |у| ≤ 1°, то можно использовать приближенный метод, так как в этом случае c1р ≈ 0 и с1 ≈ 1 + х1/х12. Тогда
 (9.227)
(9.227)
Если же расчет с1 проводить по уточненным формулам (9.224) и (9.225), то

 (9.228)
(9.228)
Расчет характеристик рекомендуется проводить в следующей последовательности.
Вначале находят активную и реактивную составляющие комплексного сопротивления правой ветви схемы замещения (см. рис. 9.55):
ZВЕТВИ = c1(r1 + jx1) + j +
+  , (9.229)
, (9.229)
где
 (9.229а)
(9.229а)
Из (9.229) с учетом (9.227) или (9.228) получают
R = a' + а, (9.230)
+ а, (9.230)
X = b; (9.231)
 . (9.232)
. (9.232)
Далее находят (см. рис. 9.55)

 и
и 
Составляющие тока статора являются суммами активных и реактивных составляющих токов параллельных ветвей схемы замещения:
 (9.233)
(9.233)
Полный ток статора
 (9.234)
(9.234)
Приведенный ток ротора
 . (9.235)
. (9.235)
Ход последующих расчетов ясен из приведенных формул в формуляре (табл. 9.30).
Таблица 9.30. Формуляр расчета рабочих характеристик асинхронных двигателей
Рном =…; 2р =…; U1ном =….В; I1ном =…А; I0a =…А;
I0р ≈ Iμ =…А; Рст + Ртр.щ. + Рмех =…кВт;
Рэ.щ.ном = …кВт: r1 =…Ом; r/2 =…Ом; с1 =…
a/ =…; a = …Ом; b/ =…Ом; b =…Ом
*Для двигателей с короткозамкнутым ротором Рэ.щ.ном = 0.
После окончания расчета для принятых значений скольжения строится характеристика s = f (P2), по которой уточняется значение sном, соответствующее заданной номинальной мощности Р2ном (см. пример расчета на рис. 9.77), и заполняется последний столбец формуляра.
В приведенных формулах не учтено возможное изменение параметров при s > sном. Поэтому при расчете характеристик двигателей с двухклеточными короткозамкнутыми роторами или с роторами, имеющими фигурные пазы, в которых в повышенной степени проявляется действие эффекта вытеснения тока, для каждого из принятых значений скольжения, больших sном, необходимо уточнять значения параметров r'2 и х'2 (см. § 9.13).
Рабочие характеристики асинхронного двигателя мощностью 15 кВт приведены в примере расчета (см. § 9.17).
Расчет рабочих характеристик по круговой диаграмме. Круговая диаграмма асинхронного двигателя изображена на рис. 9.56 [5]. Исходными данными для ее построения являются:
ток синхронного холостого хода /о, А,
 (9.236)
(9.236)
где I0a – по (9.266); I0p ≈ Iμ
Коэффициент с1 рассчитывают по (9.223) или по (9.225).
Сопротивления короткого замыкания
 (9.237)
(9.237)
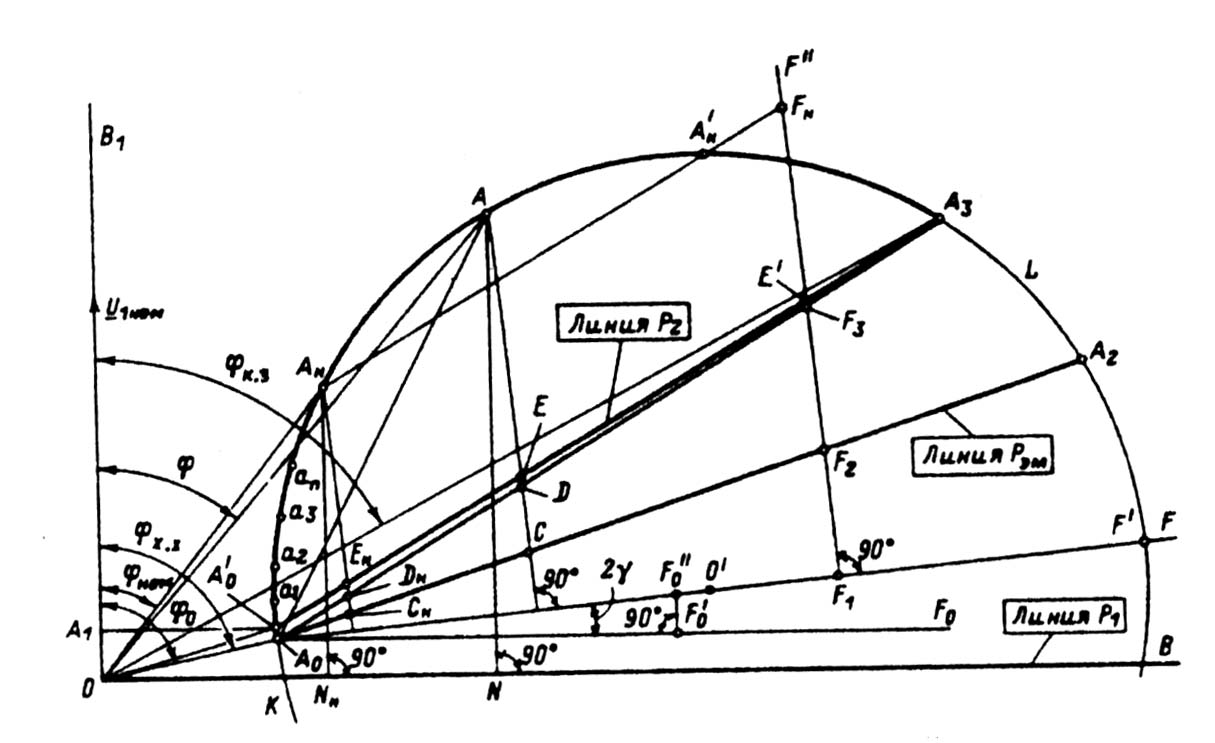
Рис. 9.56. Круговая диаграмма асинхронной машины
Чтобы размеры круговой диаграммы были удобны для работы, целесообразно вначале выбрать ее диаметр DK (в пределах 200. ..250 мм), после чего рассчитать масштабы: масштаб тока, А/мм: ; масштаб мощности, Вт/мм: mP = 3 Uном mI; масштаб момента, Нм/мм: mM = mP / Ω , где Ω =
; масштаб мощности, Вт/мм: mP = 3 Uном mI; масштаб момента, Нм/мм: mM = mP / Ω , где Ω =  .
.
При построении диаграммы вектор напряжения направляют по оси ординат ОВ1. Из начала координат строят вектор тока
направляют по оси ординат ОВ1. Из начала координат строят вектор тока
синхронного холостого хода ОА0
I0 — под углом φ0 к оси ординат φ0 = arccos . Точку A0, удобно найти, отложив по вертикальной и горизонтальной осям ее координаты, соответственно равные I0a и I0p .
. Точку A0, удобно найти, отложив по вертикальной и горизонтальной осям ее координаты, соответственно равные I0a и I0p .
Через точку A0 проводят линии A0F0 || ОВ и A0F под углом 2γ к оси ординат. Из-за малости γ построение угла < F0A0F удобно выполнять следующим образом. В произвольной точке F'0 прямой A0F0 восстанавливают перпендикуляр к линии A0F0 и откладывают на нем отрезок
| F'0 F''0| = | А0 F'0| tg 2γ ≈ | А0 F'0| 2 tg γ;
Линия A0F определяет положение диаметра круговой диаграммы. Отложив на ней отрезок |А0О'| = 0,5 Dk, проводят окружность с центром О' радиусом 0,5DK. Через произвольную точку F1 диаметра A0F' проводят линию (F' F1) ┴ (A0F) и откладывают на ней отрезки |F1F2| = |A0F1| и |F1F3| = |A0F1|
и |F1F3| = |A0F1| . Через точку А0 и точки F2 и F3, проводят прямые до пересечения их с окружностью соответственно в точках А2 и А3. На оси ординат откладывают отрезок |OA1| = Р0/mр, где Р0 = Pст + 3
. Через точку А0 и точки F2 и F3, проводят прямые до пересечения их с окружностью соответственно в точках А2 и А3. На оси ординат откладывают отрезок |OA1| = Р0/mр, где Р0 = Pст + 3  + Рмех, и через точку А1 проводят |А1А'0| || ВО. Точку А'0 соединяют с точками О и А3. На этом построение круговой диаграммы заканчивается.
+ Рмех, и через точку А1 проводят |А1А'0| || ВО. Точку А'0 соединяют с точками О и А3. На этом построение круговой диаграммы заканчивается.
Окружность диаметром DK и с центром О' является геометрическим местом концов векторов тока статора двигателя при различных скольжениях. Точка окружности A0 определяет положение конца вектора тока I0 при синхронном холостом ходе, а точка А'0 — при реальном холостом ходе двигателя. Отрезок О А'0 определяет ток Ix.x, а угол < A'0OB1 – cos φк.з. Точка А2 окружности определяет положение конца вектора тока при коротком замыкании (s = 1), отрезок ОА3 — ток Iк.з, а угол < А3ОВ1 – соs φк.з. Точка А2 определяет положение конца вектора тока при s = ∞.
Рабочие характеристики можно рассчитать по круговой диаграмме или аналитическим методом. Расчет по круговой диаграмме более нагляден, но менее точен, так как требует графических построений, снижающих точность расчета. Аналитический метод более универсален, позволяет учитывать изменение отдельных параметров при различных скольжениях и может быть легко переведен на язык программ при использовании в расчетах ЭВМ.
Аналитический метод расчета. В настоящее время практически все расчеты проводят аналитическим методом. Формулы для расчета рабочих характеристик приведены в табл. 9.28 в удобной для ручного счета последовательности. Расчет характеристик проводят, задаваясь значениями скольжений в диапазоне s ≈ (0,2...1,5) sном. Номинальное скольжение можно предварительно взять при sном ≈
. Для построения характеристик достаточно рассчитать значения требуемых величин для пяти - шести различных скольжений, выбранных в указанном диапазоне примерно через равные интервалы (см. пример расчета).Перед началом расчета рекомендуется выписать значения постоянных, не зависящих от скольжения величин, как это показано в формуляре и в примере расчета. К таким величинам относятся номинальное напряжение фазы U1ном, сопротивления r1 и
, сумма потерь Pcт + Pмех (для двигателей с фазным ротором также Ртр.щ) и составляющие тока синхронного холостого хода: реактивная I0р ≈ Iμ и активная, которую определяют из выражения , (9.226)Выписывается также значение коэффициента с1, определенное по (9.223) или по (9.225), и расчетные величины, обозначенные в формуляре а, а', b и b' . Формулы для их определения зависят от принятого (точного или приближенного) метода расчета с1.
Если |у| ≤ 1°, то можно использовать приближенный метод, так как в этом случае c1р ≈ 0 и с1 ≈ 1 + х1/х12. Тогда
(9.227)Если же расчет с1 проводить по уточненным формулам (9.224) и (9.225), то
(9.228)Расчет характеристик рекомендуется проводить в следующей последовательности.
Вначале находят активную и реактивную составляющие комплексного сопротивления правой ветви схемы замещения (см. рис. 9.55):
ZВЕТВИ = c1(r1 + jx1) + j
+ , (9.229)где
(9.229а)Из (9.229) с учетом (9.227) или (9.228) получают
R = a'
+ а, (9.230)X = b; (9.231)
. (9.232)Далее находят (см. рис. 9.55)
и Составляющие тока статора являются суммами активных и реактивных составляющих токов параллельных ветвей схемы замещения:
(9.233)Полный ток статора
(9.234)Приведенный ток ротора
. (9.235)Ход последующих расчетов ясен из приведенных формул в формуляре (табл. 9.30).
Таблица 9.30. Формуляр расчета рабочих характеристик асинхронных двигателей
Рном =…; 2р =…; U1ном =….В; I1ном =…А; I0a =…А;
I0р ≈ Iμ =…А; Рст + Ртр.щ. + Рмех =…кВт;
Рэ.щ.ном = …кВт: r1 =…Ом; r/2 =…Ом; с1 =…
a/ =…; a = …Ом; b/ =…Ом; b =…Ом
| № п/п | Расчетная формула | Едини- цы вели- чины | | | Скольжение | ||
| 0,005 | 0,01 | 0,015 | ... | sном | |||
| 1 |  | Ом | | | | | |
| 2 |  | Ом | | | | | |
| 3 | R = a + | Ом | | | | | |
| 4 | X = b + | Ом | | | | | |
| 5 |  | Ом | | | | | |
| 6 |  | А | | | | | |
| 7 | | - | | | | | |
| 8 | | - | | | | | |
| 9 |   | А | | | | | |
| 10 |   | А | | | | | |
| 11 |  | А | | | | | |
| 12 |  | А | | | | | |
| 13 | P1 = 3 U1ном I1a 10 -3 | кВт | | | | | |
| 14 | Рэ1 = 3 I12 r1 10 -3 | кВт | | | | | |
| 15 | Рэ1 = 3 (I11) 2 r/2 10 -3 | кВт | | | | | |
| 16 | Рэ.щ. ≈ Рэ.щ.ном. (I1/I1ном)* | кВт | | | | | |
| 17 | Рдоб = 0,005 Р1 | кВт | | | | | |
| 18 | Σ Р = Рст + Рмех + Ртр.щ + Рэ1 + Рэ2 + Рэ.щ + Рдоб | кВт | | | | | |
| 19 | Р2 = Р1 - Σ Р | кВт | | | | | |
| 20 | η = 1 - Σ Р / P | – | | | | | |
| 21 | cos φ = I1a / I1 | – | | | | | |
*Для двигателей с короткозамкнутым ротором Рэ.щ.ном = 0.
После окончания расчета для принятых значений скольжения строится характеристика s = f (P2), по которой уточняется значение sном, соответствующее заданной номинальной мощности Р2ном (см. пример расчета на рис. 9.77), и заполняется последний столбец формуляра.
В приведенных формулах не учтено возможное изменение параметров при s > sном. Поэтому при расчете характеристик двигателей с двухклеточными короткозамкнутыми роторами или с роторами, имеющими фигурные пазы, в которых в повышенной степени проявляется действие эффекта вытеснения тока, для каждого из принятых значений скольжения, больших sном, необходимо уточнять значения параметров r'2 и х'2 (см. § 9.13).
Рабочие характеристики асинхронного двигателя мощностью 15 кВт приведены в примере расчета (см. § 9.17).
Расчет рабочих характеристик по круговой диаграмме. Круговая диаграмма асинхронного двигателя изображена на рис. 9.56 [5]. Исходными данными для ее построения являются:
ток синхронного холостого хода /о, А,
(9.236)где I0a – по (9.266); I0p ≈ Iμ
Коэффициент с1 рассчитывают по (9.223) или по (9.225).
Сопротивления короткого замыкания
(9.237) Рис. 9.56. Круговая диаграмма асинхронной машины
Чтобы размеры круговой диаграммы были удобны для работы, целесообразно вначале выбрать ее диаметр DK (в пределах 200. ..250 мм), после чего рассчитать масштабы: масштаб тока, А/мм:
; масштаб мощности, Вт/мм: mP = 3 Uном mI; масштаб момента, Нм/мм: mM = mP / Ω , где Ω = .При построении диаграммы вектор напряжения
направляют по оси ординат ОВ1. Из начала координат строят вектор токасинхронного холостого хода ОА0
I0 — под углом φ0 к оси ординат φ0 = arccos
. Точку A0, удобно найти, отложив по вертикальной и горизонтальной осям ее координаты, соответственно равные I0a и I0p .Через точку A0 проводят линии A0F0 || ОВ и A0F под углом 2γ к оси ординат. Из-за малости γ построение угла < F0A0F удобно выполнять следующим образом. В произвольной точке F'0 прямой A0F0 восстанавливают перпендикуляр к линии A0F0 и откладывают на нем отрезок
| F'0 F''0| = | А0 F'0| tg 2γ ≈ | А0 F'0| 2 tg γ;
Линия A0F определяет положение диаметра круговой диаграммы. Отложив на ней отрезок |А0О'| = 0,5 Dk, проводят окружность с центром О' радиусом 0,5DK. Через произвольную точку F1 диаметра A0F' проводят линию (F' F1) ┴ (A0F) и откладывают на ней отрезки |F1F2| = |A0F1|
и |F1F3| = |A0F1| . Через точку А0 и точки F2 и F3, проводят прямые до пересечения их с окружностью соответственно в точках А2 и А3. На оси ординат откладывают отрезок |OA1| = Р0/mр, где Р0 = Pст + 3 + Рмех, и через точку А1 проводят |А1А'0| || ВО. Точку А'0 соединяют с точками О и А3. На этом построение круговой диаграммы заканчивается.Окружность диаметром DK и с центром О' является геометрическим местом концов векторов тока статора двигателя при различных скольжениях. Точка окружности A0 определяет положение конца вектора тока I0 при синхронном холостом ходе, а точка А'0 — при реальном холостом ходе двигателя. Отрезок О А'0 определяет ток Ix.x, а угол < A'0OB1 – cos φк.з. Точка А2 окружности определяет положение конца вектора тока при коротком замыкании (s = 1), отрезок ОА3 — ток Iк.з, а угол < А3ОВ1 – соs φк.з. Точка А2 определяет положение конца вектора тока при s = ∞.