ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 09.11.2023
Просмотров: 398
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
b'ш1(2) =
 (9.198)
(9.198)(индекс 1 при расчете b'ш1, индекс 2 при расчете b'ш2).
Значения коэффициента kδ в зависимости от отношения δп/δ для открытых пазов приведены на рис. 9.54.
Пульсационные потери в зубцах статора
Pпул1 ≈ 0,11
 ; (9.199)
; (9.199)пульсационные потери в зубцах ротора
Pпул2 ≈ 0,11
 ; (9.200)
; (9.200)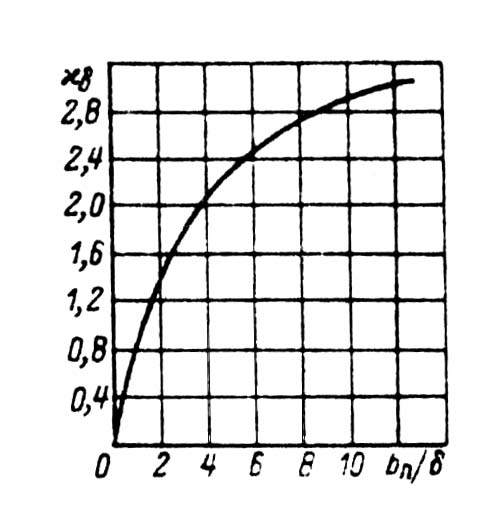
Рис. 9.54. К расчету пульсационных потерь
в асинхронных машинах
В этих формулах mz1 — масса стали зубцов статора, кг, определяется по (9.189); mz2 — масса стали зубцов ротора, кг:
mz2 = Z2hz2bz2срlст2kc2γc (9.201)
где hz2 — расчетная высота зубца ротора, м; bz2cp — средняя ширина зубца ротора, м:
bz2cp = (bz2max + bz2min) / 2.
Поверхностные и пульсационные потери в статорах двигателей с и короткозамкнутыми или фазными роторами со стержневой обмоткой обычно малы, так как в пазах таких роторов bш2 мало и пульсации индукции в воздушном зазоре над головками зубцов статора незначительны. Поэтому расчет этих потерь в статорах таких двигателей не проводят.
В общем случае добавочные потери в стали
Рстдоб = Рпов1 + Рпул1 + Рпов2 + Рпул2 (9.202)
и полные потери в стали асинхронных двигателей
Pст = Рст.осн + Рст.доб. (9.203)
Обычно Рст.доб приблизительно в 5—8 раз меньше, чем Рст.осн.
Электрические потерн в асинхронных двигателях рассчитывают раздельно в обмотках статоров и роторов.
Электрические потери во всех фазах обмотки статора, Вт,
Pэ1 = m1
 r1. (9.204)
r1. (9.204)Электрические потери во всех фазах обмотки фазного ротора, Вт,
Рэ2 = m2

r2 = m1
 . (9.205)
. (9.205)Электрические потери в обмотке короткозамкнутого ротора, Вт,
Pэ2 = m2
 r2 = Z2 r2 (9.206)
r2 = Z2 r2 (9.206)или
Рэ2 = m1
. (9.207)Электрические потери в щеточном контакте Рэ.ш, Вт, фазных роторов асинхронных двигателей, не имеющих приспособлений для подъема щеток и замыкания накоротко контактных колец при номинальном режиме работы,
Рэ.щ = m2ΔUщIк.к, (9.208)
где ΔUщ — падение напряжения в скользящем контакте щетка — кольцо, В; принимается в зависимости от марки щеток по табл. П 4.2; Iк.к — ток в кольце, А; при соединении обмотки ротора в звезду Iк.к = I2 ; при соединении обмотки ротора в треугольник (при m2 = 3) Iк.к =
 I2.
I2.Механические и вентиляционные потери в асинхронных двигателях рассчитывают по приближенным формулам, полученным из опыта проектирования и эксплуатации двигателей. Коэффициент трения (Кт) учитывает конструкцию, скорость вращения, число пар полюсов, мощность двигателя. Его размерность изменяется в зависимости от вида формулы для определения Рмех (9.209 — 9.213).
Потери на трение в подшипниках и вентиляционные потери в двигателях с радиальной системой вентиляции без радиальных вентиляционных каналов, с короткозамкнутым ротором и вентиляционными лопатками на замыкающих кольцах, Вт,
Рмех ≈ Кт (n / 1000)2 (10D)3 ; (9.209)
Кт = 5 при 2р = 2; Кт = 6 при 2р ≥ 4 для двигателей с Da ≤ 0,25 м;
Кт = 6 при 2р = 2; Кт = 7 при 2р ≥ 4 для двигателей с Da > 0,25 м.
В двигателей с двигателях с внешним обдувом (0,1 ≤ Da ≤ 0,5 м)
Рмех = Кт (n /10)2D4a ; (9.210)
Кт = 1 для двигателей с 2р = 2 и Кт = 1,3(1 - Da) при 2р ≥ 4.
В двигателях с радиальной системой вентиляции средней и большой мощности
Рмех = 1,2
 2 р τ
2 р τ
3 (nк +1,1)
103(9.211)где nк — число радиальных вентиляционных каналов; при отсутствии радиальных каналов nк = 0.
В двигателях с аксиальной системой вентиляции
Рмех = Кт(n/1000)2 (10 Dвент)3, (9.212)
где D вент — наружный диаметр вентилятора, м; в большинстве конструкций можно принять Dвент ≈ Da; Kт = 2,9 для двигателей с Da ≤ 0,25 м; Кт = 3,6 для двигателей с Da = 0,25...0,5 м.
В двигателях большой мощности (0,5 < Da < 0,9 м)
Рмех = Кт (10Da)3 (9.213)
В этом выражении коэффициент Кт принимается по табл. 9.29.
Таблица 9.29. К расчету механических потерь
двигателей большой мощности
| 2p | 2 | 4 | 6 | 8 | 10 | 12 |
| Кт | 3,65 | 1,5 | 0,7 | 0,35 | 0,2 | 0,2 |
Потери на трение щеток о контактные кольца, Вт, рассчитывают для двигателей с фазными роторами при отсутствии приспособлений для подъема щеток и закорачивания контактных колец в номинальном режиме работы:
Ртр.щ = Ктр ρщ Sщ υк, (9.214)
где Ктр — коэффициент трения щеток о контактные кольца (обычно принимается равным 0,16—0,17); ρщ — давление на контактной поверхности щеток, кПа (см. табл. П 4.2); Sщ — общая площадь контактной поверхности всех щеток, м2; vk — линейная скорость поверхности контактных колец, м/с.
Добавочные потери при нагрузке асинхронных двигателей возникают за счет действия потоков рассеяния, пульсаций индукции в воздушном зазоре, ступенчатости кривых распределения МДС обмоток статора и ротора и ряда других причин. В короткозамкнутых роторах, кроме того, возникают потери от поперечных токов, т. е. токов между стержнями, замыкающихся через листы сердечника ротора. Эти токи особенно заметны при скошенных пазах ротора. В
таких двигателях, как показывает опыт эксплуатации, добавочные потери при нагрузке могут достигать 1...2 % (а в некоторых случаях даже больше) от подводимой мощности. ГОСТ устанавливает редкие расчетные добавочные потери при номинальной нагрузке, равные 0,5 % номинальной потребляемой мощности. При расчетах потерь и КПД двигателей в режимах, отличных от номинального, значение добавочных потерь пересчитывают пропорционально квадрату токов:
Рдоб = Рдоб.ном (I1/I1ном)2. (9.215)
Коэффициент полезного действия двигателя
η = Р2 /P1 = 1 -
 / P1, (9.216)
/ P1, (9.216)где
— сумма всех потерь в двигателе, Вт. Ток холостого хода двигателя
 (9.217)
(9.217)При определении активной составляющей тока холостого хода принимают, что потери на трение и вентиляцию и потери в стали при холостом ходе двигателя такие же, как и при номинальном режиме. При этом условии
Iх.х.а =
 (9.218)
(9.218)Электрические потери в статоре при холостом ходе приближенно принимаются равными:
Рэ1х.х = mI2μr1. (9.219)
Реактивная составляющая тока холостого хода
Iх.х.р ≈ Iμ (9.220)
Коэффициент мощности при холостом ходе
cosφх.х = Iх.х.а / Iх.х. (9.221)
9.12. РАСЧЕТ РАБОЧИХ ХАРАКТЕРИСТИК
Рабочими характеристиками асинхронных двигателей называют зависимости P1, I1, cosφ, η, s1 = f (P2). Часто к ним относят также зависимости М = f (P2) и I2 или
 = (P2) [6].
= (P2) [6].Методы расчета характеристик базируются на системе уравнений токов и напряжений асинхронной машины, которой соответствует Г-образная схема замещения (рис. 9.55). Г-образная схема получена из Т-образной схемы замещения (см. рис. 9.47), в которой ветвь, содержащая параметр Z12, вынесена на вход схемы. Т-образная и Г-образная схемы идентичны для данной конкретной ЭДС, для которой рассчитывают комплексный коэффициент
 , равный взятому с обратным знаком отношению вектора напряжения фазы
, равный взятому с обратным знаком отношению вектора напряжения фазы  к вектору ЭДС —
к вектору ЭДС — 
В асинхронных двигателях при изменении тока от синхронного холостого хода до номинального
изменяется незначительно. Поэтому для получения рабочих характеристик коэффициент , рассчитывают для синхронного холостого хода и принимают его значение неизменным. Это не вносит заметных погрешностей в расчет характеристик, так как значение коэффициента , во всем диапазоне изменения нагрузки от Р2 = 0 до Р2 = Р2ном изменяется лишь в третьем или четвертом знаке.Корректировку коэффициента
, обычно производят лишь при расчете пусковых характеристик или режимов работы двигателя с большими скольжениями, при которых ток статора существенно превышает номинальный.Для расчета рабочих характеристик коэффициент определяют из выражения
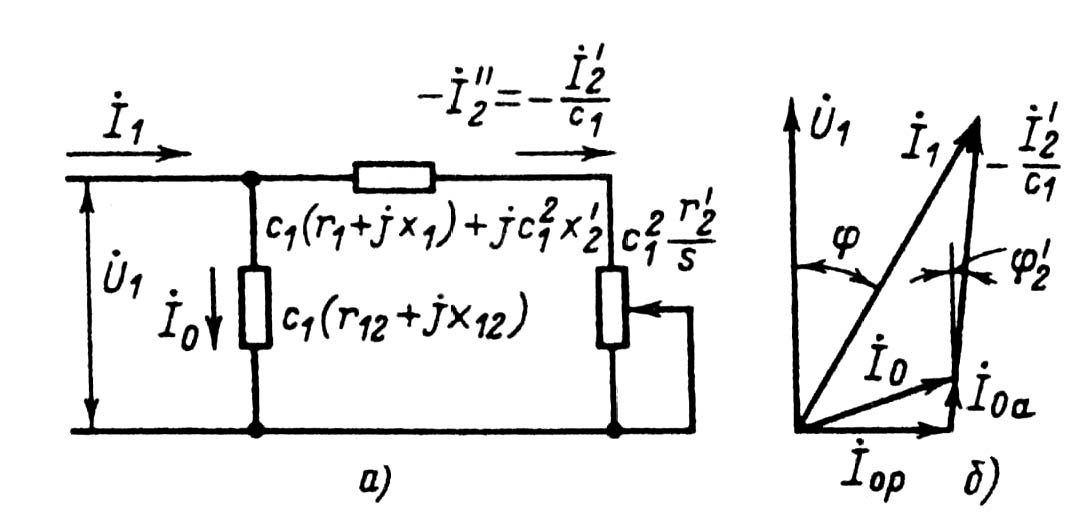
Рис. 9.55. Г-образная схема замещения асинхронной машины (а)
и соответствующая ей векторная диаграмма (б)
где
 (9.222)
(9.222)В асинхронных двигателях мощностью более 2 — 3 кВт, как правило, | γ | ≤ 1°, поэтому реактивной составляющей коэффициента с1, можно пренебречь, тогда приближенно
 (9.223)
(9.223)При более точных расчетах определяют и активную, и реактивную составляющие c1 по следующим формулам:
 (9.224)
(9.224)Полное значение
 (9.225)
(9.225)Как видно, выражение (9.223) может быть получено из (9.225) при условии r12 << х12 и r1 << х12, что практически всегда имеет место в асинхронных машинах мощностью Р