Файл: Оглавление Введение Основные понятия и определения тмм.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 09.11.2023
Просмотров: 140
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
 а) звено совершает плоскопараллельное движение, состоящее из переносного, т.е. поступательного со скоростью полюса и относительного вращательного вокруг полюса (рис.15).
а) звено совершает плоскопараллельное движение, состоящее из переносного, т.е. поступательного со скоростью полюса и относительного вращательного вокруг полюса (рис.15).Принимая за полюс т. A, получим:
 VB=VA+VBA; где VBA=·lAB; aB=aA+aBA; где aBA=anBA+atBA при
VB=VA+VBA; где VBA=·lAB; aB=aA+aBA; где aBA=anBA+atBA при anBA=2·lAB; atBA=·lAB.
Здесь V, a, , - линейные скорости и ускорения соответствующих характерных точек, а также угловые скорость и уско-
рение звена (индексы соответствуют ха-
рактеру ускорений и обозначениям точек).
б
 ) звено совершает сложное движение, состоящее из переносного вращательного и относительного поступательного, например, звено 1 (рис.16).
) звено совершает сложное движение, состоящее из переносного вращательного и относительного поступательного, например, звено 1 (рис.16).Пусть B1 и B2 – точки, принадлежащие звеньям 1 и 2. Тогда:
VB1=VB2+VB1B2, где VB2=·lAB. aB1=aB2+atB1B2+akB1B2, где ускорение Кориолиса akB1B2=2VB1B2· и совпадает с направлением вектора VB1B2, повернутого на 90○ в сторону переносного вращения.
Решение векторных уравнений осуществляется графически путем построения так называемых планов скоростей и ускорений, на которых абсолютные скорости и ускорения откладываются от одной точки, называемой полюсом, в определенном масштабе.
Пример расчета кривошипно-ползунного механизма рассмотрен на рис.17, где план положений (рис.17, а), план скоростей и ускорений (рис.17, б, в).
Векторные уравнения для скоростей записываются в виде:
 VB=VA+VBA; VB=VBx+VBBx;
VB=VA+VBA; VB=VBx+VBBx;где VA=1·lOA; VBx=0; VBA_|_AB; VBBx||x-x,
т.е. в выбранном масштабе μV: pb||x-x; ab_|_AB
VBA= μV·ab; VB= μV·pb и 2= VBA/ lAB.
Векторные уравнения для ускорений при 1=const записываются в виде:
a
B=aA+aBA; aB=aBx+akBBx+atBBx; где aA=anA=12·lOA; aBA=anBA+atBA;здесь anBA=22·lAB; atBA=ε2·lAB; aBx=0; akBBx=0; atBBx||x-x.
Все ускорения представлены на рис.17 в выбранном масштабе μa в виде соответствующих отрезков, например, aB=μa·πb и т.д.
При определении скоростей и ускорений промежуточных точек звеньев, например т. S, можно использовать так называемую теорему подобия, согласно которой точки на плане положений звеньев и соответственные точки на планах скоростей и ускорений образуют подобные фигуры или пропорциональные отрезки. Рассмотрим доказательство данной теоремы. На рис.18 показано звено ABC и планы скоростей и ускорений для точек этого звена:
отрезок ca на плане скоростей соответствует VCA_|_CA;
отрезок ab на плане скоростей соответствует VAB_|_AB;
отрезок bc на плане скоростей соответствует VBC_|_BC;
т.е. треугольник abc подобен треугольнику ABC.
Ускорения относительного (вращательного) движения равны:
т.е. aCA/ lCA =aAB/ lAB =aBC/ lBC или ca/CA=ab/AB=bc/BC,
Следовательно, треугольник abc подобен треугольнику ABC. Аналогичным является построение фигур для любой промежуточной точки, например т. S (рис.18, а, б).
4.3. Исследование рычажных механизмов методом
кинематических диаграмм
Кинематической диаграммой называется графическая зависимость какого-либо параметра движения звена от времени или от перемещения входного звена, представленные в определенной системе координат.
Если известна одна кинематическая диаграмма, то можно получить остальные зависимости путем графического дифференцирования или интегрирования.
 На рис.19, а, б показана последовательность построения кинематической диаграммы перемещения ползуна кривошипно-ползунного механизма S(φ) и S(t), а также элементы графического дифференцирования с получением диаграммы скоростей V(t) методом хорд.
На рис.19, а, б показана последовательность построения кинематической диаграммы перемещения ползуна кривошипно-ползунного механизма S(φ) и S(t), а также элементы графического дифференцирования с получением диаграммы скоростей V(t) методом хорд.Если диаграмма V(t) первична, то процесс, обратный интегрированию, обеспечит получение диаграммы S(t) и называется графическим интег-рированием.
Следует отметить, что графические методы часто приводят к искажениям резуль-
Рис. 19 татов из-за неточности графических построений, поэтому необходимо контролировать расположение характерных точек, соответствующих экстремумам на диаграммах.
4.4. Кинематическое исследование рычажных механизмов
аналитическим методом
Аналитические методы исследования позволяют проводить анализ с заданной степенью точности. Кроме того, создание математических моделей механизмов позволяет решать задачи их оптимального синтеза при использовании ЭВМ.
 Рассмотрим пример кинематического исследования синусного механизма (механизм двойного ползуна), где кривошип 1 вращается с угловой скоростью ω и угловым ускорением ε (рис.20).
Рассмотрим пример кинематического исследования синусного механизма (механизм двойного ползуна), где кривошип 1 вращается с угловой скоростью ω и угловым ускорением ε (рис.20).Тогда скорость и ускорение точки А равны:
VA=lOA·ω;
Все точки звена 1 и 2 описывают окружности, а точки звена 3 движутся поступательно, имея перемещения, скорости и ускорения равные:
SB=lOA·sinφ=lOA·sinωt; VB=dSB/dt=dSB·dφ/dφ·dt=lOA·ω·cosφ;
aB=d2SB/dt=lOA·(ε·cosφ-ω2·sinφ)
при ε=0 aB=-lOA·ω2·sinφ.
При исследовании многих механизмов получаются достаточно громоздкие формулы, что не является препятствием при использовании ЭВМ.
При исследовании пространственных механизмов используются элементы векторной алгебры и векторного анализа. Положения, скорости и ускорения точек механизма выражаются в векторной форме, при необходимости вычисляются проекции на оси и плоскости. Примеры таких исследований изложены в учебной литературе.
5. Динамический анализ рычажных механизмов
5.1. Классификация действующих сил
Среди сил, действующих на механизм, различают:
а) движущие силы Fд или моменты Mд, ускоряющие движение входных (начальных) звеньев и совершающие положительную работу. Например: силы давления газа на поршень в двигателе внутреннего сгорания, силы веса при опускании груза и т.д.
б) силы сопротивления Fc или моменты Мс, замедляющие движение входных звеньев и совершающие отрицательную работу. Они могут быть силами полезного сопротивления, дающими производственный эффект, и силами вредного сопротивления не дающими такого эффекта. К первому типу относятся например, силы тяжести при подъеме груза, а ко второму типу – силы трения.
в) силы реакции в кинематических парах Fij, возникающие в опорах звеньев и являющиеся внутренними силами для механизма в целом и внешними для каждого отдельного звена.
г) силы инерции Fи или моменты сил инерции Mи возникают при переменном движении звеньев механизма и могут быть как движущими, так и силами сопротивления (в зависимости от их направления относительно направления движения звеньев). Фактически эти силы действуют на тело, вызывающее ускорение другого тела. Однако, условное приложения сил инерции к ускоряемому телу позволяет рассматривать его в равновесии. Этот принцип – принцип Даламбера позволяет задачу динамики свести к статическому расчету.
 Силы инерции относятся к категории распределенных или так называемых массовых сил, которые как и другие аналогичные силы могут быть приведены к главному вектору и главному моменту (рис.21).
Силы инерции относятся к категории распределенных или так называемых массовых сил, которые как и другие аналогичные силы могут быть приведены к главному вектору и главному моменту (рис.21).Fи =-mas; Mи=-JS·ε; где m и JS – масса и момент инерции звена относительно оси, про-ходящей через центр масс;
aS – ускорение центра масс;
ε – угловое ускорение звена.
Знаки (-) показывают, что направления Fи и Ми противоположны соответствующим ускорениям.
Сила Fи и момент Ми, могут быть заменены одной силой Fи/=Fи, линия действия которой проходит через так называемый центр качаний (точка К на рис.21) на оси звена и отстоит от линии действия Fи на расстоянии h=Ми/Fи при замене Ми парой сил Fи/.
5.2. Приведение сил и масс в механизме
Для исследования закона движения механизма его удобно заменить одним условным звеном – звеном приведения, имеющим закон движения аналогичного звена реального механизма.
Все внешние силы, действующие на звенья при этом заменяются одной приведенной силой F∑пр или моментом М∑пр , мощности Р∑пр которых равны мощностям Рi заменяемых сил Fi и моментов сил Mi, т.е.
Р∑пр=∑Рi, где Рi=Fi·Vi·cos(FiVi) или Рi=Мi·ωi;
Р∑пр=F∑пр·V·cos(F∑прV) или Р∑пр=М∑пр·ω.
Здесь Vi и V – скорости точек приложения соответствующих сил; ωi и ω – угловые скорости i-го звена и звена приведения.
Суммарную приведенную силу или момент удобно записывать в виде составляющих, например: М∑пр=∑МFiпр+∑ММiпр, где каждая составляющая определяется из соответствующего равенства мощностей:
МFiпр=Fi·Vi/ω·cos(FiVi) - для силы Fi;
 ММiпр=Мi·ωi/ω - для момента Мi;
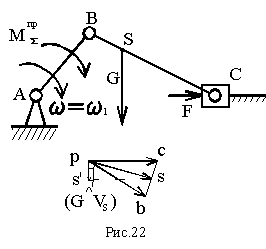
ММiпр=Мi·ωi/ω - для момента Мi;Пример кривошипно-ползунного механизма (рис.22): М∑пр=МFпр+MGпр,
где МFпр=F·VC/ω1=F·lAB·рс/pb;
