ВУЗ: Казахская Национальная Академия Искусств им. Т. Жургенова
Категория: Учебное пособие
Дисциплина: Не указана
Добавлен: 03.02.2019
Просмотров: 17379
Скачиваний: 18
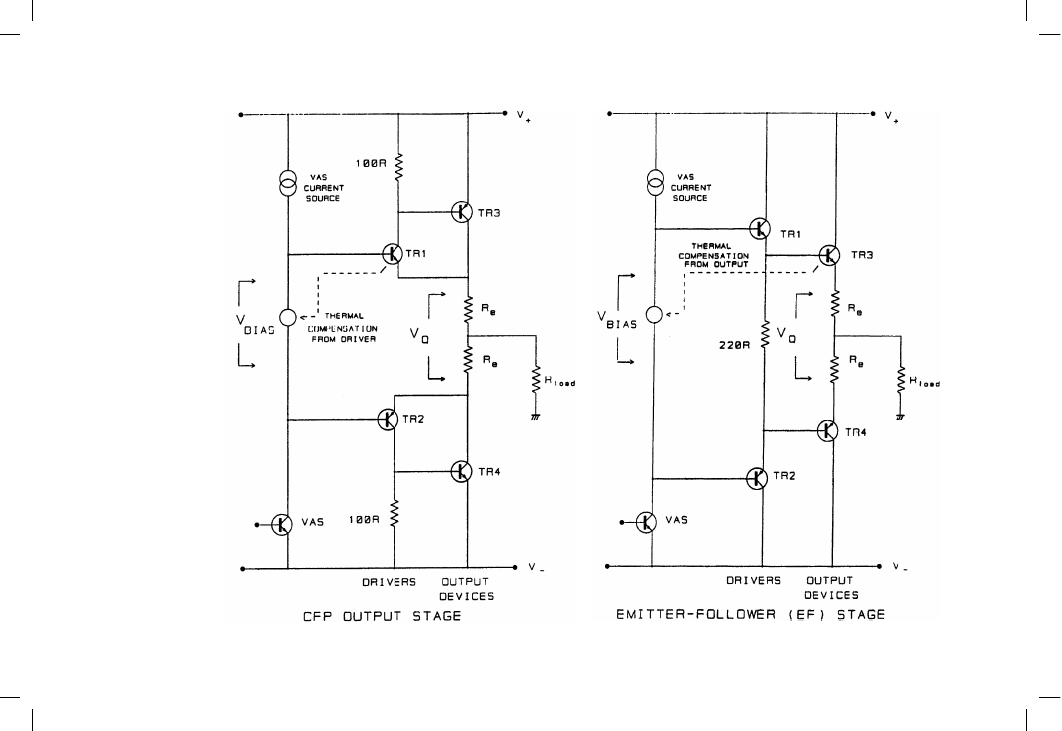
Figure 12.2
The Emitter-Follower
(EF) and
Complementary
Feedback Pair
(CFP) output
configurations,
showing Vbias and
Vq
Thermal compensation and thermal dynamics
however CFP driver dissipation varies strongly with power output so the
superiority of this configuration cannot be taken for granted.
Driver heatsinks are much smaller than those for output devices, so the CFP
Vq time-constants promise to be some ten times shorter.
Basic thermal compensation
In Class B, the usual method for reducing quiescent variations is thermal
feedback. Vbias is generated by a thermal sensor with a negative
temperature-coefficient, usually a Vbe-multiplier transistor mounted on the
main heatsink. This system has proved entirely workable over the last 30-odd
years, and usually prevents any possibility of thermal runaway. However, it
suffers from thermal losses and delays between output devices and
temperature sensor that make maintenance of optimal bias rather ques-
tionable, and in practice quiescent conditions are a function of recent signal
and thermal history. Thus the crossover linearity of most power amplifiers is
intimately bound up with their thermal dynamics, and it is surprising this
area has not been examined more closely; Sato et al
[1]
is one of the few
serious papers on the subject, though the conclusions it reaches appear to be
unworkable, depending on calculating power dissipation from amplifier
output voltage without considering load impedance.
As is almost routine in audio design, things are not as they appear. So-called
thermal feedback is not feedback at all – this implies the thermal sensor is
in some way controlling the output stage temperature; it is not. It is really
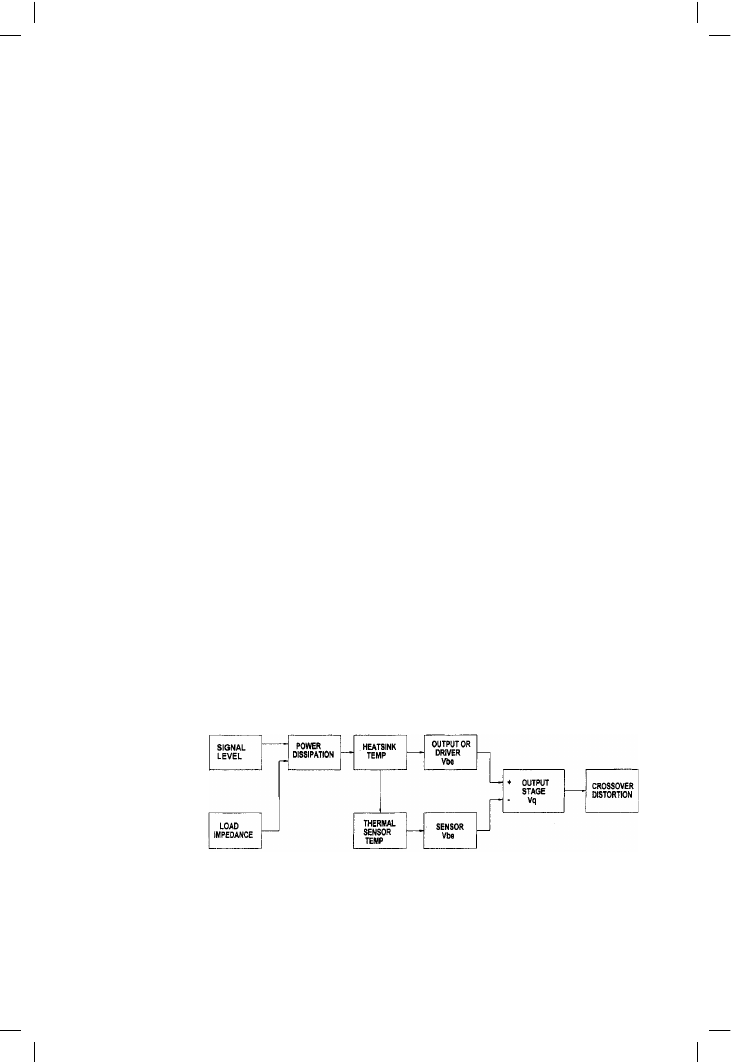
a form of approximate feedforward compensation, as shown in Figure 12.3.
The quiescent current (Iq) of a Class-B design causes a very small
dissipation compared with the signal, and so there is no meaningful
feedback path returning from Iq to the left of the diagram. (This might be
less true of Class-AB, where quiescent dissipation may be significant.)
Instead this system aspires to make the sensor junction temperature mimic
the driver or output junction temperature, though it can never do this
331
Figure 12.3
Thermal signal flow
of a typical power
amplifier, showing
that there is no
thermal feedback to
the bias generator.
There is instead
feedforward of driver
junction temperature,
so that the sensor Vbe
will hopefully match
the driver Vbe
Audio Power Amplifier Design Handbook
promptly or exactly because of the thermal resistances and thermal
capacities that lie between driver and sensor temperatures in Figure 12.3.
It does not place either junction temperature or quiescent current under
direct feedback control, but merely aims to cancel out the errors. Hereafter
I simply call this thermal compensation.
Assessing the bias errors
The temperature error must be converted to mV error in Vq, for comparison
with the tolerance bands suggested above. In the CFP stage this is
straightforward; both driver Vbe and the halved Vbias voltage decrease by
2 mV per °C, so temperature error converts to voltage error by multiplying
by .002 Only half of each output stage will be modelled, exploiting
symmetry, so most of this chapter deals in half-Vq errors, etc. To minimise
confusion this use of half-amplifiers is adhered to throughout, except at the
final stage when the calculated Vq error is doubled before comparison with
the tolerance bands quoted above.
The EF error conversion is more subtle. The EF Vbias generator must establish
four times Vbe plus Vq, so the Vbe of the temperature-sensing transistor is
multiplied by about 4.5 times, and so decreases at 9 mV/°C. The CFP Vbias
generator only multiplies 2.1 times, decreasing at 4 mV/°C. The correspond-
ing values for a half-amplifier are 4.5 and 2 mV/°C.
However, the EF drivers are at near-constant temperature, so after two
driver Vbe’s have been subtracted from Vbias, the remaining voltage
decreases faster with temperature than does output device Vbe. This runs
counter to the tendency to under-compensation caused by thermal
attenuation between output junctions and thermal sensor; in effect the
compensator has thermal gain, and this has the potential to reduce long-
term Vq errors. I suspect this is the real reason why the EF stage, despite
looking unpromising, can in practice give acceptable quiescent stability.
Thermal simulation
Designing an output stage requires some appreciation of how effective the
thermal compensation will be, in terms of how much delay and attenuation
the thermal signal suffers between the critical junctions and the Vbias
generator.
We need to predict the thermal behaviour of a heatsink assembly over time,
allowing for things like metals of dissimilar thermal conductivity, and the
very slow propagation of heat through a mass compared with near-instant
changes in electrical dissipation. Practical measurements are very time-
consuming, requiring special equipment such as multi-point thermocouple
recorders. A theoretical approach would be very useful.
332

Thermal compensation and thermal dynamics
For very simple models, such as heat flow down a uniform rod, we can
derive analytical solutions to the partial differential equations that describe
the situation; the answer is an equation directly relating temperature to
position along-the-rod and time. However, even slight complications (such
as a non-uniform rod) involve rapidly increasing mathematical complex-
ities, and anyone who is not already deterred should consult Carslaw and
Jaeger
[3]
; this will deter them.
To avoid direct confrontation with higher mathematics, finite-element and
relaxation methods were developed; the snag is that Finite-Element-
Analysis is a rather specialised taste, and so commercial FEA software is
expensive.
I therefore cast about for another method, and found I already had the
wherewithall to solve problems of thermal dynamics; the use of electrical
analogues is the key. If the thermal problem can be stated in terms of
lumped electrical elements, then a circuit simulator of the SPICE type can
handle it, and as a bonus has extensive capabilities for graphical display of
the output. The work here was done with PSpice. A more common use of
electrical analogues is in the electro-mechanical domain of loudspeakers;
see Murphy
[4]
for a virtuoso example.
The simulation approach treats temperature as voltage, and thermal energy
as electric charge, making thermal resistance analogous to electrical
resistance, and thermal capacity to electrical capacitance. Thermal
capacity is a measure of how much heat is required to raise the temperature
of a mass by 1°C. (And if anyone can work out what the thermal equivalent
of an inductor is, I would be interested to know.) With the right choice of
units the simulator output will be in Volts, with a one-to-one correspond-
ence with degrees Celsius, and Amps, similarly representing Watts of heat
flow; see Table 12.2. It is then simple to produce graphs of temperature
against time.
333
Table 12.2
Reality
Simulation
Temperature
°C
Volts
Heat quantity
Joules (Watt-seconds)
Coulombs (Amp-seconds)
Heat flowrate
Watts
Amps
Thermal resistance
°C/Watt
ohms
Thermal capacity
°C/Joule
Farads
Heat source
Dissipative element,
e.g. transistor
Current source
Ambient
Medium-sized planet
Voltage source

Audio Power Amplifier Design Handbook
Since heat flow is represented by current, the inputs to the simulated system
are current sources. A voltage source would force large chunks of metal to
change temperature instantly, which is clearly wrong. The ambient is
modelled by a voltage source, as it can absorb any amount of heat without
changing temperature.
Modelling the EF output stage
The major characteristic of Emitter-Follower (EF) output stages is that the
output device junction temperatures are directly involved in setting Iq. This
junction temperature is not accessible to a thermal compensation system,
and measuring the heatsink temperature instead provides a poor approx-
imation, attenuated by the thermal resistance from junction to heatsink
mass, and heavily time-averaged by heatsink thermal inertia. This can
cause serious production problems in initial setting up; any drift of Iq will
be very slow as a lot of metal must warm up.
For EF outputs, the bias generator must attempt to establish an output bias
voltage that is a summation of four driver and output Vbe’s. These do not
vary in the same way. It seems at first a bit of a mystery how the EF stage,
which still seems to be the most popular output topology, works as well as
it does. The probable answer is Figure 12.1, which shows how driver
dissipation (averaged over a cycle) varies with peak output level for the
three kinds of EF output described on page 113, and for the CFP
configuration. The SPICE simulations used to generate this graph used a
triangle waveform, to give a slightly closer approximation to the peak-
average ratio of real waveforms. The rails were +/–50 V, and the load
8 !.
It is clear that the driver dissipation for the EF types is relatively constant
with power output, while the CFP driver dissipation, although generally
lower, varies strongly. This is a consequence of the different operation of
these two kinds of output. In general, the drivers of an EF output remain
conducting to some degree for most or all of a cycle, although the output
devices are certainly off half the time. In the CFP, however, the drivers turn
off almost in synchrony with the outputs, dissipating an amount of power
that varies much more with output. This implies that EF drivers will work at
roughly the same temperature, and can be neglected in arranging thermal
compensation; the temperature-dependent element is usually attached to
the main heatsink, in an attempt to compensate for the junction
temperature of the outputs alone. The Type I EF output keeps its drivers at
the most constant temperature; this may (or may not) have something to do
with why it is the most popular of the EF types.
(The above does not apply to integrated Darlington outputs, with drivers
and assorted emitter resistors combined in one ill-conceived package, as
the driver sections are directly heated by the output junctions. This would
334