ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 334
Скачиваний: 0
СОДЕРЖАНИЕ
Глава I особенности ремонта электрооборудования и автоматики
§ 1. Организация ремонта электрооборудования
§ 2. Виды ремонта и общая схема технологического процесса
Глава II технология ремонта систем электрооборудования и автоматики
§ 1. Дефекты систем и их классификация
§ 2. Характеристика систем электрооборудования и автоматики как объектов ремонта
§ 3. Методика обнаружения неисправных агрегатов и узлов
§ 4. Замена агрегатов электрооборудования и автоматики
§ 5. Ремонт электромонтажных комплектов и проводов бортовой сети
§ 1. Начальные этапы технологического процесса ремонта аккумуляторных батарей
§ 2. Дефектация, ремонт и изготовление деталей и узлов
§ 3. Сборка и испытание аккумуляторных батарей
Глава IV технология ремонта электрических машин
§ 1. Начальные этапы технологического процесса ремонта электрических машин
§ 2. Дефектация, ремонт, изготовление деталей и узлов
§ 3. Сборка и испытание электрических машин
Глава V технология ремонта аппаратов регулирования и управления
§ 1. Начальные этапы технологического процесса ремонта аппаратов регулирования и управления
§ 2. Дефектация и ремонт узлов
§ 3. Сборка и предварительная регулировка аппаратов
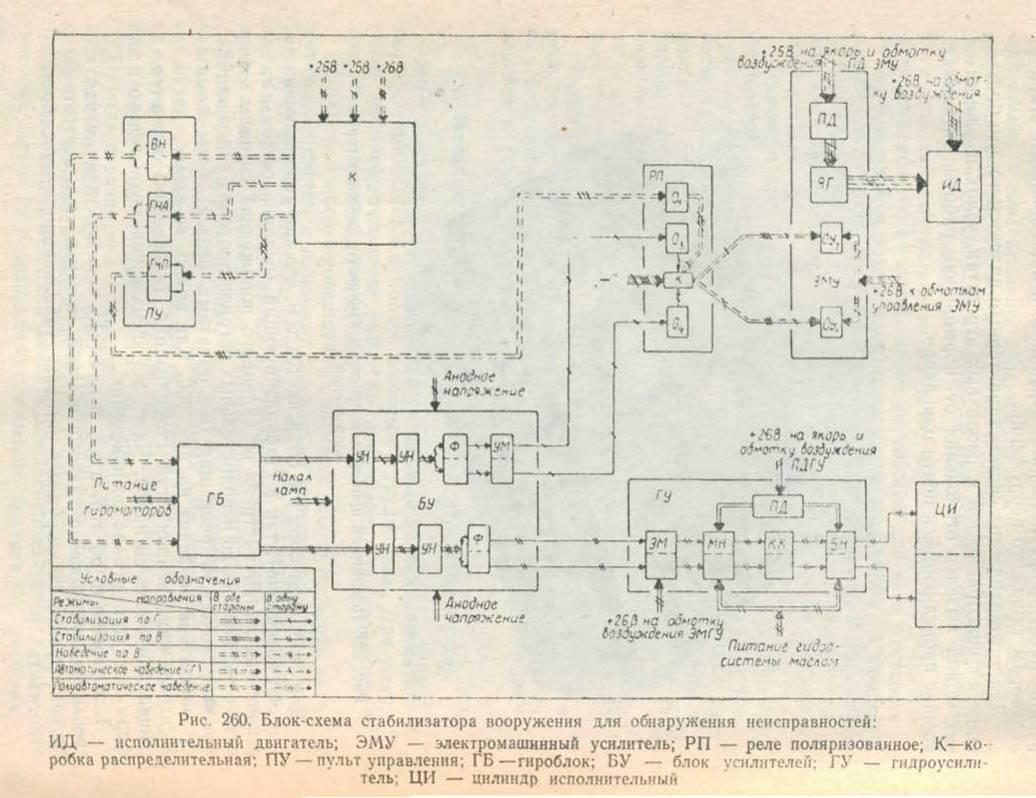
—в горизонтальной плоскости — гироблок, блок усилителей, электромашинный усилитель, исполнительный двигатель, а также поляризованное реле (легко сменяемый узел, установленный в распределительной коробке);
—в вертикальной плоскости — гироблок, блок усилителей, гидроусилитель и исполнительный цилиндр.
К агрегатам второй группы в обеих плоскостях относятся пулы управления и распределительная коробка.
Из такого деления агрегатов следует два вывода:
во-первых, функции агрегатов по плоскостям достаточно строго разграничены. Большинство агрегатов стабилизатора участвует в формировании сигналов только в одной плоскости;
во-вторых, отсутствие наведения по вертикали или по горизонтали (в автоматическом режиме) при наличии стабилизирующих моментов есть следствие выхода из строя агрегатов, участвующих в формировании только управляющих сигналов по наведению.
Однако оба эти вывода не свободны от исключений. Действительно, гироблок и блок усилителей имеют как узлы, работающие в вертикальной плоскости, так и узлы, работающие в горизонтальной плоскости. Поэтому при отыскании неисправного агрегата в одной из плоскостей стабилизации должны быть проверены соответствующие узлы этих агрегатов. Кроме того, и в гироблоке и в блоке усилителей возможны неисправности, приводящие к отказу стабилизатора сразу по обеим плоскостям. В гироблоке это обрыв одной из фаз питания гиромоторов в месте пайки проводов трехфазной сети 36 В 400 Гц к штырям штепсельного разъема Ш1 ГБ. В блоках усилителей некоторых модификаций такой неисправностью является обрыв цепи накала ламп, так как в этих блоках усилителей одну последовательную цепь накала имеют все лампы усилителей напряжения независимо от плоскости стабилизации, в которой они работают, и вторую — все лампы усилителей мощности и фазочувствительных выпрямителей. В блоках усилителей более поздних выпусков накал ламп осуществляется по отдельной цепи для каждой плоскости стабилизации.
Что касается второго вывода, то, кроме указанных агрегатов, может оказаться неисправным гироблок. Отсутствие наведения при наличии стабилизации в этом случае вызывается обрывом одной из обмоток электромагнита наведения датчика угла. Как известно, эти обмотки не участвуют в формировании стабилизирующего сигнала.
И все же эти выводы, несмотря на указанные исключения, могут оказать существенную помощь в отыскании неисправного агрегата. Во-первых, при наличии неисправности только в одной плоскости совершенно исключаются из рассмотрения агрегаты и узлы, не участвующие в формировании сигнала в этой плоскости.
Необходимо также учитывать следующее обстоятельство. В подавляющем большинстве случаев, как показывает опыт, вероятность одновременного возникновения двух и более неисправностей весьма мала. Такая вероятность резко возрастает при затоплении машины, при получении ею боевых повреждений в зоне расположения агрегатов стабилизатора и в ряде других случаев. При нормальных же условиях эксплуатации, как правило, возможно появление лишь одной неисправности. Поэтому в случае появления отказа сразу в обеих плоскостях прежде всего должны быть проверены цепи питания гиромоторов включительно от преобразователя ПТ-200Ц до гироблока, а затем цепи накала ламп блока усилителей.
Во-вторых, невозможность управления пушкой или башней при нормальной стабилизации свидетельствует о неисправности одного из агрегатов: пульта управления, распределительной коробки или электромагнита наведения соответствующего датчика угла в гироблоке. Естественно, что для того чтобы сделать заключение о неисправности одного из указанных трех агрегатов, необходимо прежде убедиться в наличии стабилизирующего момента.
Наличие наведения в стабилизированном режиме само по себе уже является признаком отсутствия неисправностей в цепях стабилизации. Это видно из рис. 260: все цепи стабилизации одновременно являются цепями наведения. Однако не все цепи наведения являются цепями стабилизации. Поэтому отсутствие наведения еще не означает отсутствия стабилизирующего момента.
Убедиться в наличии стабилизирующего момента в вертикальной плоскости при неработающих цепях наведения достаточно просто. Для этого необходимо приложить возмущающее усилие любого направления к казенной части орудия и затем снять это усилие. Если при приложении усилия слышно характерное изменение звука работы приводного двигателя гидроусилителя, а после снятия усилия пушка возвращается в исходное положение, то стабилизирующий момент есть. Если пушка не возвращается в исходное положение, то нужно проверить, не находится ли движок одного из регулировочных потенциометров в крайнем левом (против часовой стрелки) положении, и в случае необходимости повернуть его по часовой стрелке на 1/3—1/2 его хода. Если и после этого пушка не возвращается в исходное положение, то стабилизирующий момент отсутствует.
Наличие стабилизирующего момента в горизонтальной плоскости можно проверить принципиально таким же способом. Однако для создания возмущающего момента усилие необходимо прикладывать к дульному срезу орудия. При этом, особенно если танк стоит с небольшим продольным или поперечным креном, усилия одного человека может оказаться недостаточно для преодоления момента трения в погоне башни и момента неуравновешенности башни, вызванного креном. Поэтому в данном случае следует пользоваться другим достаточно надежным способом определения наличия стабилизирующего момента. Способ этот состоит в использовании внутренних сигналов системы.
Под внутренними сигналами стабилизатора подразумеваются сигналы, вызывающие при отсутствии внешних воздействий пере-510
мещение объекта стабилизации в момент включения системы. К этим сигналам следует отнести: остаточное напряжение на выходе вращающегося трансформатора датчика угла У[^У1; сигнал, обусловленный несимметрией характеристик выходных ламп электронного усилителя Л/^у1; сигналы, обусловленные несимметрией характеристик обмоток поляризованного реле Л/^П! и обмоток управления ЭМУД/^му1 и т. д. Каждый из этих сигналов, будучи приведенным к исполнительному органу системы, даст момент определенной величины и направления. Следовательно, исполнительный орган (ИД или ЦИ) создаст некий результирующий момент, равный алгебраической сумме моментов от каждого звена. Например, для горизонтальной плоскости стабилизации
![]()
или
![]()
Этот результирующий момент аналогичен управляющему сигналу по наведению. При включении системы он вызовет небольшое перемещение стабилизируемого объекта. Перемещение это будет продолжаться до тех пор, пока между плоскостью наружной рамки датчика угла (осью УУ) и осью канала ствола не накопится угол рассогласования, соответствующий моменту, достаточному для компенсации момента от внутренних сигналов,
![]()
Из всех составляющих результирующего момента от внутренних сигналов для горизонтальной плоскости наибольшую величину имеет сигнал, обусловленный несимметрией обмоток и подвижной системы якорька поляризованного реле. Поэтому в горизонтальной плоскости начальное перемещение башни (рывок) при включении системы (тумблера А) составляет угол от 1,5 до 5 тысячных делений угломера. В вертикальной плоскости, где такой источник несимметрии, как поляризованное реле, отсутствует, перемещение пушки весьма незначительно и может быть даже незамечено.
Несмотря на то, что результирующий момент по своему действию аналогичен моменту наведения, создается он звеньями системы, участвующими в формировании сигналов как по наведению, так и по стабилизации, и наоборот, агрегаты, формирующие сигнал наведения, в создании этого внутреннего сигнала участия не принимают. Если основным источником несимметрии является поляризованное реле, то источником компенсирующего момента является датчик угла. Следовательно, наличие начального рывка башни при включении тумблера А и последующая ее остановка свидетельствуют о наличии стабилизирующего момента, а стало быть об исправности цепей стабилизации. Начальный рывок башни наблюдается по азимутальному указателю.
В некоторых весьма редких случаях алгебраическая сумма моментов от внутренних сигналов может оказаться равной нулю. Тогда свидетельством наличия стабилизирующего момента будет реакция системы на другой внутренний сигнал: самопроизвольное перемещение наружной рамки датчика угла вследствие дебалансных моментов, действующих на внутреннюю рамку. Как известно, внешним проявлением этого перемещения наружной рамки является увод башни от заданного положения с некоторой ограничиваемой техническими условиями скоростью.
Следует,
однако, заметить, что за увод может быть
принято самопроизвольное перемещение
башни со скоростью, близкой к минимальной
скорости наведения. Такое перемещение
может явиться следствием различных
причин и свидетельствовать как раз об
отсутствии стабилизирующего момента.
Например, оно может быть вызвано креном
танка, наличием сигналов несимметрии
![]() и
и![]()
рядом других причин. Чтобы отличить увод от такого перемещения, достаточно знать, что характерной особенностью увода в горизонтальной плоскости является прерывистый характер перемещения башни, а следовательно, и стрелки азимутального указателя (рис. 261). Движение же башни во всех иных случаях про исходит с гораздо более высокими скоростями и совершенно плавно.
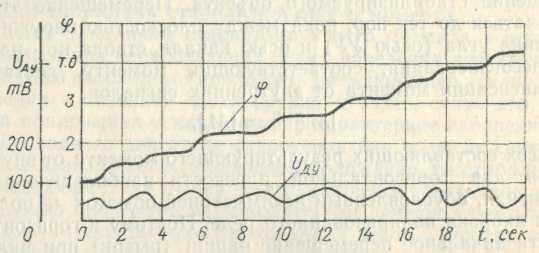
Рис. 261. Характер самопроизвольного перемещения (увода)
стабилизированной башни:
![]() — изменение
угла поворота башни; Uду
— изменение напряжения на выходе
датчика угла
— изменение
угла поворота башни; Uду
— изменение напряжения на выходе
датчика угла
Естественно, что в случае возникновения сомнений в характере перемещения башни, наличие стабилизирующего момента должно быть проверено путем приложения усилия к дульному срезу пушки в горизонтальной плоскости.
Отсутствие в системе сразу обоих внутренних сигналов практически исключено. А проявление хотя бы одного из них (начального рывка или увода башни) является достаточным признаком наличия стабилизирующего момента.
Частным случаем отсутствия наведения при наличии стабилизирующего момента является отсутствие наведения лишь в одну сторону. Неисправности стабилизатора, проявляющиеся при его работе только в одну сторону, для краткости будем именовать односторонними. Итак, при одностороннем отсутствии наведения и нормальном стабилизирующем моменте, как видно из блок-схемы рис. 260, неисправность следует искать только в соответствующих потенциометрах пульта управления. Действительно, в электромагните наведения датчика угла реверс наведения осуществляется путем изменения направления тока в обмотке статора.
Любой элемент схемы, в котором изменению направления выходного сигнала системы соответствует лишь изменение направления или фазы собственного сигнала, либо обеспечивает нормальную работу системы, либо его неисправность проявляется как двусторонняя неисправность системы. В пульте управления формирование сигналов наведения в каждую сторону происходит в соответствующем плече потенциометра. К отсутствию наведения в одну сторону может привести только обрыв одного из его плеч.
Деление неисправностей системы на односторонние и двусторонние, а также рассмотрение агрегатов и узлов системы с учетом их работы при разнонаправленных входных сигналах облегчает задачу отыскания неисправных агрегатов и при отсутствии стабилизирующего момента в той или иной плоскости. Рассмотрим с этой точки зрения работу ряда звеньев стабилизатора.
Задающим элементом системы является датчик угла. Изменению направления угла рассогласования между плоскостью наружной рамки датчика угла (осью УУ) и осью канала ствола соответствует изменение фазы напряжения выходной (измерительной) обмотки вращающегося трансформатора. Эта обмотка является источником сигнала, пропорционального углу рассогласования, независимо от направления последнего. Поэтому выход из строя этой обмотки или ее цепи приведет к отсутствию стабилизирующего момента в обе стороны, т. е. к двусторонней неисправности. К такому же результату приведет и обрыв обмотки возбуждения вращающегося трансформатора.