Файл: Г.М. Гринфельд лекции по курсу дискретные системы автоматического управления.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 399
Скачиваний: 0
СОДЕРЖАНИЕ
1.1 Типы квантования непрерывных сигналов.
1.2. Решетчатые функции разностные уравнения.
1.3. Обобщенная структурная схема дискретной системы.
1.4. Простейший импульсный элемент. Формирующий элемент. Фиксатор.
2. Основы теории z-преобразования
2.1. Дискретное преобразование Лапласа. Z-преобразование.
2.2. Основные теоремы z-преобразования.
2.3. Передаточная функция разомкнутой дискретной системы.
2.4. Последовательное соединение звеньев в дискретных сау.
2.5. Передаточная функция замкнутой дискретной системы.
2.6. Обратное z-преобразование.
3. Анализ устойчивости и точности
3.1 Прямой метод оценки устойчивости.
3.2 Критерий устойчивости Шур-Кона.
3.3 Критерий устойчивости, использующий билинейное преобразование.
3.4. Абсолютно устойчивые системы.
3.5. Анализ точности дискретных систем.
4. Частотные характеристики дискретных систем
4.1. Теорема Котельникова-Шеннона.
4.2. Логарифмические частотные характеристики дискретных сау.
5. Определение реакции дискретной сау
5.1. Метод дробного квантования.
5.2. Метод модифицированного z-преобразования.
6. Системы автоматического управления
6.2. Передаточные функции цву, реализующего типовые законы управления.
7. Коррекция цифровых систем управления
7.1. Коррекция дискретных сау с помощью непрерывных регуляторов.
7.2. Коррекция сау с помощью цифровых регуляторов.
7.3. Физическая реализуемость цифровых регуляторов.
7.4. Реализация цифровых регуляторов импульсными фильтрами.
7.5. Реализация цифровых регуляторов на базе цву.
8. Методические указания и вариаты расчетно-графического задания
![]()
Тогда выражение для комплексной амплитудно-фазовой характеристики нескорректированной разомкнутой системы:
![]()
Соответствующие
этому выражению логарифмическая
амплитудно-частотная
![]() и фазо-частотная
и фазо-частотная![]() характеристики приведены на рис. 39. По
их виду на основании критерия Найквиста
можно сделать заключение, что
нескорректированная система находится
на границе устойчивости.
характеристики приведены на рис. 39. По
их виду на основании критерия Найквиста
можно сделать заключение, что
нескорректированная система находится
на границе устойчивости.
Далее
необходимо построить логарифмическую
амплитудно-частотную
![]() и фазо-частотную
и фазо-частотную![]() характеристики скорректированной
системы, для чего необходимо воспользоваться
соответствующими номограммами,
разработанными для коррекции непрерывных
систем. С их помощью определена частота
среза и запас устойчивости по амплитуде
для ЛАХ скорректированной системы:
характеристики скорректированной
системы, для чего необходимо воспользоваться
соответствующими номограммами,
разработанными для коррекции непрерывных
систем. С их помощью определена частота
среза и запас устойчивости по амплитуде
для ЛАХ скорректированной системы:![]() и
и![]() дб.
Характеристики
дб.
Характеристики![]() и
и![]() приведены на рис. 39.
приведены на рис. 39.
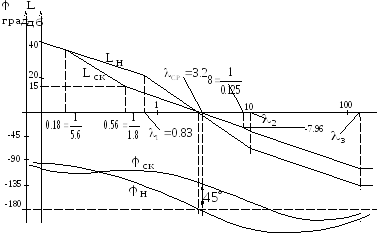
Рис. 39. Логарифмические амплитудно-частотные и фазо-частотные характеристики к примеру 27
Для
обеспечения физической реализуемости
корректирующего устройства не в полной
мере обеспечен требуемый запас
устойчивости по амплитуде в высокочастотной
части среднечастотного участка ЛАХ. С
этой же целью в частотной характеристике
скорректированной системы сохранен
сомножитель
![]() и приведена апериодическая составляющая:
и приведена апериодическая составляющая:
![]()
При этом выражение для комплексной амплитудно-фазовой характеристики скорректированной разомкнутой системы имеет вид:
![]()
Осуществляя
обратную замену
![]() ,
получим:
,
получим:
![]()
Используя
подстановку
![]() ,
определим дискретную передаточную
функцию скорректированной разомкнутой
системы вz-форме:
,
определим дискретную передаточную
функцию скорректированной разомкнутой
системы вz-форме:
![]()
Непосредственно
из полученного выражения искомую
передаточную функцию корректирующего
устройства
![]() определить нельзя. Поэтому воспользуемся
тем, что:
определить нельзя. Поэтому воспользуемся
тем, что:
![]()
Следовательно:
![]()
или
![]() (53)
(53)
Далее
необходимо тем или иным способом найти
функцию
![]() ,Z-изображение которое
равно выражению, стоящему в правой части
равенства (53), т.е.:
,Z-изображение которое
равно выражению, стоящему в правой части
равенства (53), т.е.:
![]() (53)
(53)
после чего искомая передаточная функция непрерывного корректирующего звена определяется следующим образом:
![]() (54)
(54)
В ряде
случаев для нахождения функции
![]() достаточно воспользоваться таблицамиZ-преобразования. Кроме
того, можно применить следующую методику:
предварительно найдем решетчатую
функцию
достаточно воспользоваться таблицамиZ-преобразования. Кроме
того, можно применить следующую методику:
предварительно найдем решетчатую
функцию![]() ,Z-изображение которой
равно выражению, стоящему в правой части
равенства (53).
,Z-изображение которой
равно выражению, стоящему в правой части
равенства (53).
Для
рассматриваемого примера
![]() .
.
Такой решетчатой
функции соответствует сколь угодно
много непрерывных функций
![]() ,
совпадающих с
,
совпадающих с![]() в моменты квантования. Поэтому переход
к
в моменты квантования. Поэтому переход
к![]() осуществим, формально воспользовавшись
равенством
осуществим, формально воспользовавшись
равенством![]() ,
откуда
,
откуда![]() ,
тогда:
,
тогда:
![]() .
.
Изображение
по Лапласу от
![]() :
:
![]()
Передаточная функция непрерывного корректирующего звена в соответствии с (54):
![]()
7.2. Коррекция сау с помощью цифровых регуляторов.
Преимущество цифровых корректирующих устройств перед аналоговыми регуляторами заключается прежде всего в возможности реализации практически любого алгоритма управления, в повышении надежности и уменьшении массогабаритных показателей аппаратуры. Цифровой регулятор может включаться в систему последовательно (рис. 40) или в цепь обратной связи (рис.41).

Рис. 40. Коррекция дискретной САУ с помощью последовательного
цифрового корректирующего звена
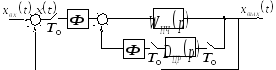
Рис. 41. Коррекция дискретной САУ с помощью цифрового
корректирующего звена цепи обратной связи
Рассмотрим методику расчета передаточной функции цифрового регулятора применительно к дискретной системе, описанной в предыдущем примере.
Пример 28. Имеем:
![]() и
и![]()
Построение
ЛАХ разомкнутой скорректированной
системы осуществляется по тем же
значениям показателей качества, что и
в примере 27, основные параметры
![]() не изменяются. Возможный вид
не изменяются. Возможный вид![]() приведен на рис. 42.
приведен на рис. 42.
Соответствующее значение амплитудно-частотной характеристики:
![]()
Тогда:
![]() и
и![]()
Для рассматриваемого способа коррекции можно записать:
![]()
Следовательно:
![]()
7.3. Физическая реализуемость цифровых регуляторов.
В общем случае передаточная функция цифрового регулятора имеет вид

откуда
![]()
и
![]() .
.
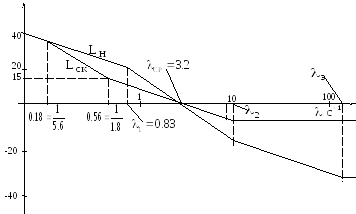
Рис. 42. Логарифмические амплитудно-частотные характеристики к примеру 28
Выполнив операцию обратного Z-преобразования над обеими частями последнего равенства, получим:

(55)
Для того,
чтобы цифровой регулятор был физически
реализуем, правая часть (55) не должна
содержать положительных степенейz.
Наличие хотя бы одного такого слагаемого
означает, что для определения очередной
дискреты выходной последовательности![]() в момент времени
в момент времени![]() используются дискреты
используются дискреты![]() ,
соответствующие последующим моментам
квантования. Следовательно, передаточная
функция
,
соответствующие последующим моментам
квантования. Следовательно, передаточная
функция![]() физически
реализуема, если порядок ее числителя
не больше порядка знаменателя, т.е.
физически
реализуема, если порядок ее числителя
не больше порядка знаменателя, т.е.
![]()
(56)
Практическая реализация функций цифровых регуляторов чаще всего осуществляется путем соответствующего программирования ЦВУ или введением в систему импульсных фильтров.
7.4. Реализация цифровых регуляторов импульсными фильтрами.
Импульсный фильтр(ИФ) представляет собой пассивный электрический четырехполюсник, включенный в систему совместно с устройствами выборки и хранения дискретных значений сигналов.