Файл: Г.М. Гринфельд лекции по курсу дискретные системы автоматического управления.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 405
Скачиваний: 0
СОДЕРЖАНИЕ
1.1 Типы квантования непрерывных сигналов.
1.2. Решетчатые функции разностные уравнения.
1.3. Обобщенная структурная схема дискретной системы.
1.4. Простейший импульсный элемент. Формирующий элемент. Фиксатор.
2. Основы теории z-преобразования
2.1. Дискретное преобразование Лапласа. Z-преобразование.
2.2. Основные теоремы z-преобразования.
2.3. Передаточная функция разомкнутой дискретной системы.
2.4. Последовательное соединение звеньев в дискретных сау.
2.5. Передаточная функция замкнутой дискретной системы.
2.6. Обратное z-преобразование.
3. Анализ устойчивости и точности
3.1 Прямой метод оценки устойчивости.
3.2 Критерий устойчивости Шур-Кона.
3.3 Критерий устойчивости, использующий билинейное преобразование.
3.4. Абсолютно устойчивые системы.
3.5. Анализ точности дискретных систем.
4. Частотные характеристики дискретных систем
4.1. Теорема Котельникова-Шеннона.
4.2. Логарифмические частотные характеристики дискретных сау.
5. Определение реакции дискретной сау
5.1. Метод дробного квантования.
5.2. Метод модифицированного z-преобразования.
6. Системы автоматического управления
6.2. Передаточные функции цву, реализующего типовые законы управления.
7. Коррекция цифровых систем управления
7.1. Коррекция дискретных сау с помощью непрерывных регуляторов.
7.2. Коррекция сау с помощью цифровых регуляторов.
7.3. Физическая реализуемость цифровых регуляторов.
7.4. Реализация цифровых регуляторов импульсными фильтрами.
7.5. Реализация цифровых регуляторов на базе цву.
8. Методические указания и вариаты расчетно-графического задания
Передаточная функция регулятора при последовательном включении ИФ(рис. 43) равна:
![]()
откуда
![]() (57)
(57)
Задавшись
требуемой передаточной функцией
![]() ,
можно определить соответствующую
передаточную функцию
,
можно определить соответствующую
передаточную функцию![]() и рассчитать параметры системы,
обеспечивающей ее аппаратную реализацию.
и рассчитать параметры системы,
обеспечивающей ее аппаратную реализацию.
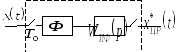
Рис. 43. Структура последовательного ИФ
Если ИФ
построен на базе RC-четырехполюсника,
то все полюса передаточной функции![]()
простые и
отрицательные, а нули могут быть
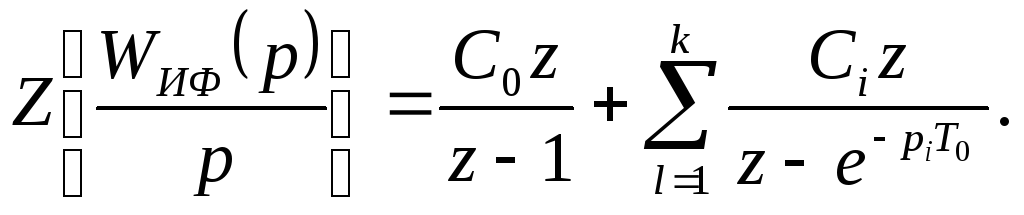
произвольными. В этом случае
![]() допускает следующее представление:
допускает следующее представление:
![]()
где
![]() -
константы;
-
константы;![]() -
полюса
-
полюса![]() ;
;![]() .
.
Тогда
![]()
и
Сравнивая последнее выражение с (57), можно сделать вывод о том, что передаточная функция
![]() может быть реализована последовательным
ИФ на базеRC- четырехполюсника,
если у
может быть реализована последовательным
ИФ на базеRC- четырехполюсника,
если у![]() :
:
- порядок знаменателя не меньше порядка числителя;
- значения нулей являются произвольными, а полюса должны быть действительными, простыми, положительными и меньше единицы.
В дальнейшем полюса, удовлетворяющие указанным условиям, определим как реализуемые полюса. В отличие от них, кратные или комплексные полюса, вещественные неположительные полюса, а также положительные полюса, модули которых больше или равны единице, относим кнереализуемым полюсам.
Пример 29. Необходимо осуществить реализацию цифрового регулятора с помощью последовательного ИФ, если:
![]()
Поскольку
сформулированные выше требования к
![]() выполняются, она может быть реализована
в виде последовательного ИФ на базеRC-
четырехполюсника.
выполняются, она может быть реализована
в виде последовательного ИФ на базеRC-
четырехполюсника.
Имеем:
![]()
Разложив последнее выражение на элементарные дроби, имеем:
![]()
или, полагая
![]() ,
вычисляем значение
,
вычисляем значение![]() .
Следовательно:
.
Следовательно:
![]()
Выполнив обратное Z-преобразование, получим:
![]()
т.е.
![]()
Указанная передаточная функция ИФ практически реализуется в виде RC- четырехполюсника, схема которого приведена на рис. 44.

Рис. 44. Схема четырехполюсника к примеру 29
Иной подход к формированию структуры цифрового регулятора связан с включением ИФ в цепь обратной связи(рис. 45).
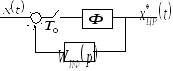
Рис. 45. Структура цифрового регулятора с ИФ в цепи обратной связи
В этом случае передаточная функция регулятора равна:
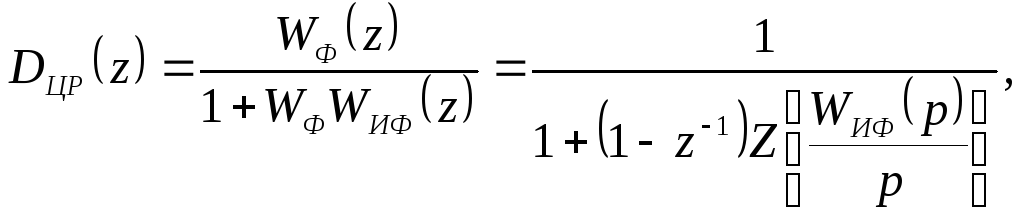 (58)
(58)
откуда
 (59)
(59)
Поскольку
передаточная функция
![]() должна быть физически реализуемой, т.е.
реакция на выходе фильтра не должна
опережать вызвавшее ее воздействие, тоZ-изображение:
должна быть физически реализуемой, т.е.
реакция на выходе фильтра не должна
опережать вызвавшее ее воздействие, тоZ-изображение:
![]()
также должно быть физически реализуемым. Следовательно, для Z-изображения:
где S,R-
натуральные числа, выполняется условие![]() .
При этом выражение (58) можно записать
следующим образом:
.
При этом выражение (58) можно записать
следующим образом:

На основании
последнего выражения делаем заключение,
что при включении ИФ в цепь обратной
связи
![]() имеет одинаковое число нулей и полюсов.
Кроме того, из (59) следует, что полюса
имеет одинаковое число нулей и полюсов.
Кроме того, из (59) следует, что полюса![]() определяются полиномом, стоящим в
числителе передаточной функции
определяются полиномом, стоящим в
числителе передаточной функции![]() ,
т.е. ее нулями. Поскольку при построении
ИФ на базеRC- схемы полюса
,
т.е. ее нулями. Поскольку при построении
ИФ на базеRC- схемы полюса![]() являются простыми и отрицательными,
нули
являются простыми и отрицательными,
нули![]() должны быть действительными, простыми,
положительными и меньшими единицы.
Такие нули относятся креализуемым.
К числунереализуемых нулейотносятся
те, для которых не выполняется хотя бы
одно из перечисленных условий. На полюса
должны быть действительными, простыми,
положительными и меньшими единицы.
Такие нули относятся креализуемым.
К числунереализуемых нулейотносятся
те, для которых не выполняется хотя бы
одно из перечисленных условий. На полюса![]() при такой структуре регулятора ограничения
не накладываются, они могут быть
произвольными.
при такой структуре регулятора ограничения
не накладываются, они могут быть
произвольными.
Пример 30. Необходимо осуществить реализацию цифрового регулятора в виде ИФ, если:
![]()
Необходимо отметить, что реализация регулятора с приведенной передаточной функцией возможна только с использованием ИФ в цепи обратной связи. Согласно (59), имеем:

откуда
![]() и
и![]() .
.
Реализация ИФ в виде RC– схемы приведена на рис. 46.
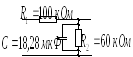
Рис. 44. Схема четырехполюсника к примеру 30
Ограничения,
связанные с реализуемостью нулей и
полюсов
![]() ,
существенно сокращают область
использования рассмотренных выше ИФ.
Применениекомбинированной схемы ИФ,
структура которой приведена на рис. 47,
обеспечивает реализацию произвольной
передаточной функции
,
существенно сокращают область
использования рассмотренных выше ИФ.
Применениекомбинированной схемы ИФ,
структура которой приведена на рис. 47,
обеспечивает реализацию произвольной
передаточной функции![]() ,
если для нее выполняется условие (56).
,
если для нее выполняется условие (56).
Передаточная функция комбинированного ИФ
![]()
Необходимо представить эту передаточную функцию в виде произведения:
![]()
где
![]() и
и![]() .
.
При этом
в
![]() включаются только реализуемые полюса,
а в
включаются только реализуемые полюса,
а в![]() -
только реализуемые нули. Кроме того,
число нулей и число полюсов передаточной
функции
-
только реализуемые нули. Кроме того,
число нулей и число полюсов передаточной
функции![]() должны совпадать.
должны совпадать.
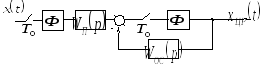
Рис. 47. Структура комбинированного ИФ
Пример 31. Необходимо осуществить реализацию цифрового регулятора в виде ИФ, если:
![]()
В приведенной
передаточной функции число реализуемых
полюсов совпадает с числом нереализуемых
нулей, а число нереализуемых полюсов –
с числом реализуемых нулей. В этом случае
разложение
![]() осуществим
следующим образом:
осуществим
следующим образом:
![]() и
и![]()
Приме 32. Необходимо осуществить реализацию цифрового регулятора в виде ИФ, если:
![]()
Приведенный
вариант передаточной функции является
более общим по сравнению с рассмотренным
в примере 31. Для ее реализации с помощью
комбинированного ИФ на базе RC-
четырехполюсника необходимо ввести в![]() дополнительные
реализуемые нули и полюса, представив
передаточную функцию в виде:
дополнительные
реализуемые нули и полюса, представив
передаточную функцию в виде:
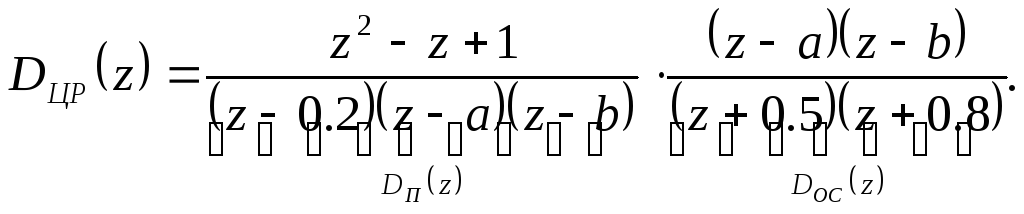
где aиb, не равные между
собой действительные числа; 0<a<1;
0<b<1. Кроме того,aиbне равны другим
полюсам и нулям![]() .
.