ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 22.10.2024
Просмотров: 162
Скачиваний: 0
СОДЕРЖАНИЕ
6.Назначение и устройство системы охлаждения двигателя.Типы.Достоинства и недостатки.
11. Экологические показатели двс: токсичность и шумность. Нормы предельной токсичности евро в России
12) Методы испытаний и характеристики, необходимые для регулировки топливной аппаратуры дизеля.
3.3. Проверка клапанных пар на суммарную герметичность
15. Силы, действующие в кшм. Их влияние на нагруженность и износ деталей кшм.
16). Классификация автомобилей. Компоновка автомобилей.
17) Классификация тракторов. Компоновка тракторов.
18).Внешние силы, действующие на трактор (автомобиль). Тяговый баланс.
19. Работа ведомого колеса. Сила и коэффициент сопротивления
20. Работа ведущего колеса. Коэффициент сцепления, буксования/
136. Приведенная характеристика подвески
Основной способ повышения
плавности хода состоит в применении
«мягкой» подвески, которая определяется
приведенным статическим ходом fст
(деформацией). На рисунке 137 представлена
зависимость изменения частоты
собственных колебаний ![]() z
подрессоренной массы отстатического
прогиба
z
подрессоренной массы отстатического
прогиба![]() ст
упругого элемента. Из приведенной
зависимости следует, что чрезмерное
увеличение хода
ст
упругого элемента. Из приведенной
зависимости следует, что чрезмерное
увеличение хода![]() ст
приводит к появлению сверхнизких
(
ст
приводит к появлению сверхнизких
(![]() z
< 1
Гц) колебаний, которые вызывают «морскую»
болезнь у водителя и пассажиров.
z
< 1
Гц) колебаний, которые вызывают «морскую»
болезнь у водителя и пассажиров.
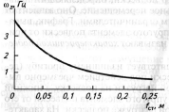
Рис. 137. Зависимость частоты собственныхколебаний от статического прогиба упругогоэлемента подвески
Нелинейные характеристики. Применение мягкой подвески при движении по неровностям может иногда приводить к пробою и вызывать удары об ограничители подвески. Чтобы этого избежать, применяют подвески с нелинейной характеристикой, в которой используются упругие элементы с переменной жесткостью. Изменение жесткости в зависимости от нагрузки может выражаться плавной или ломаной характеристикой с одним (рис. 138, б) или несколькими изломами. При этом малым нагрузкам GH на подвеску (рессора 7) соответствует «мягкий» участок характеристики с углом а.\. При увеличении GH жесткость повышается (в работу включается рессора 2), соответствуя углу сс2. Реализация в конструкции такой характеристики со ступенчатым изменением жесткости показана на рисунке 138, 6.
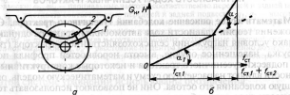
Рис. 138. Подвеска с дополнительной рессорой:а — схема конструкции; б — характеристика
Нелинейность амортизаторов (рис. 139) также повышает плавность хода автомобиля. Как и нелинейная характеристика упругого элемента подвески, нелинейность характеристики амортизатора имеет «мягкие» и «жесткие» участки. Последовательность включения в работу этих участков амортизатора согласуется с изменением нагрузки на подвеску: вначале — «мягкий» участок, затем «жесткий» и в конце отбоя также «мягкий».
Пневматические подвески. В пневматической подвеске в качестве упругого элемента используется воздух, находящийся под давлением в герметично замкнутом резервуаре. Преимущество этой подвески заключается, прежде всего, в возможности регулирования жесткости пневмоэлемента. За счет этого можно получить лучшую характеристику по сравнению с подвеской на основе механического упругого элемента. Пневматическая подвеска по сравнению с механической имеет ббльший срок службы и более высокую чувствительность к неровностям. К недостаткам пневматической подвески относят ее сложность (особенно регулируемой подвески) и высокую стоимость.
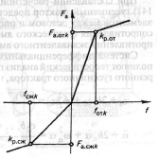 Рис. 139. Нелинейная
характеристика гидравлического
амортизатора
Рис. 139. Нелинейная
характеристика гидравлического
амортизатора
31
По управляемостью понимают способность машины двигаться по заданной траектории с требуемой точностью при воздействии водителя на механизм управления.Управляемость обусловлена двумя свойствами машины: устойчивостью при неуправляемом движении и реакцией на управляющее воздействие водителя. Эти два альтернативных свойства должны быть присущи машине в определенном соотношении. Тогда машина в целом будет обладать хорошей управляемостью. Учитывая, что разграничить эти качества машины весьма трудно, их часто рассматривают совместно.В теории автомобиля различают траекторные и курсовые отклонения. Траекторное отклонение — это отклонение вектора скорости машины от заданного направления. Курсовое отклонение — отклонение продольной оси машины от направления траектории движения. В соответствии с этими определениями различают курсовую управляемость и курсовую устойчивость.
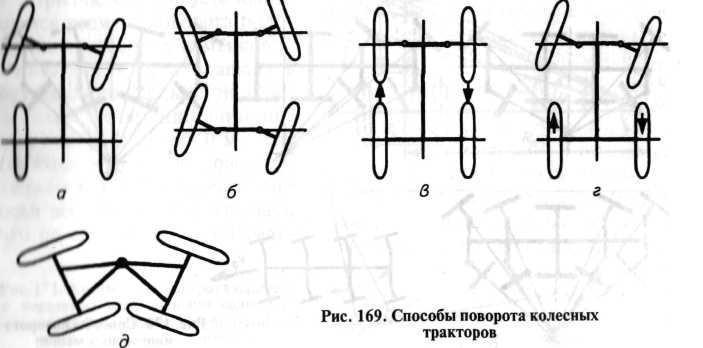
СПОСОБЫ ПОВОРОТА КОЛЕСНЫХ МАШИН
Различают следующие способы поворота:
-управляемыми колесами только передней оси (рис. 169, а);
-управляемыми колесами обеих осей двухосной машины (рис. 169, б);
-бортом за счет создания разности крутящих моментов на ведущих
колесах кинематически или торможением (рис. 169, в);
-комбинация первого или второго способа с третьим (рис. 169, г);
-с помощью шарнирно
сочлененной рамы (рис. 169, д).
СТАБИЛИЗАЦИЯ УПРАВЛЯЕМЫХ КОЛЕС
Установка шкворней. Поперечный наклон шкворней (рис. 176) вызызывает подъем автомобиля при повороте колеса вокруг оси аа, что следует из кинематики соединительного устройства шкворня с осью. Будучи выведенным из нейтрального положения, колесо стремится занять исходное положение под действием приходящейся на него части веса автомобиля. Эта же вертикальная нагрузка будет удерживать его от самопроизвольного выхода из нейтрального положения. Момент в пятне контакта колеса с дорогой, возникающий вследствие кинематики соединительного устройства шкворня с осью и удерживающий управляемое колесо от самопроизвольного поворота, называется стабилизирующим моментом.
Кинематика колеса со шкворнем, наклоненным в продольной плоскости под углом у к вертикали и установленным вертикально, но со смещением относительно оси колеса (рис. 177, а) аналогичны. В обоих случаях момент от боковых сил всегда стремится вернуть колесо в нейтральное положение. В соответствии с рисунком 177,5 стабилизирующий момент управляемого колеса с жестким ободом при качении по несминаемой поверхности
![]() ,
где
,
где
![]() -боковая реакция,
действующая перпендику-ми|1мо к плоскости
качения колеса.
-боковая реакция,
действующая перпендику-ми|1мо к плоскости
качения колеса.
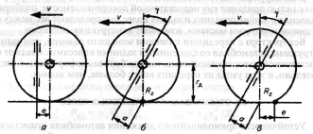
Рис. 177. Схема стабилизации управляемого колеса со смешением шкворня без наклона (а), за счет наклона шкворня в продольной плоскости при недеформируемом ободе (б) и деформируемом (в)
При качении эластичного колеса по несминаемой поверхности точка приложения равнодействующей боковых реакций смещается назад на величину е (рис. 177, в)
![]()
Как видно из полученного
выражения, при одинаковой боковой
реакции
![]() плечо
и стабилизирующий момент колеса с
эластичной шиной больше стабилизирующего
момента колеса с жестким ободом.
плечо
и стабилизирующий момент колеса с
эластичной шиной больше стабилизирующего
момента колеса с жестким ободом.
Боковая реакция Кг и стабилизирующий момент от наклона шкворня в продольной плоскости зависят от скорости движения автомобиля в квадрате, потому что основной составляющей боковой реакции при высокой скорости движения автомобиля является реакция на центробежную силу. Большой стабилизирующий момент затрудняет управление автомобилем с высокоэластичными шинами при движении с высокой скоростью. Поэтому в обоснованных случаях шкворни устанавливают вертикально или даже с обратным наклоном.
Развал колес. Колеса устанавливают наклонно (рис. 178, а) к горизонтальной плоскости под углом р, называемым углом развала. Этим достигаются три важных для эксплуатации фактора.
1. Сила сопротивления качению /у создает момент сопротивления повороту колеса на плече с при установке его с развалом и на плече с\ при установке вертикально. На меньшем плече (с < с\) момент сопротивления повороту меньше, поэтому управление автомобилем (трактором) легче.
2. При установке с развалом колесо поджимается к внутреннему коническому подшипнику ступицы, что исключает или снижает виляние колеса в случае появления зазора в подшипниках ступицы.
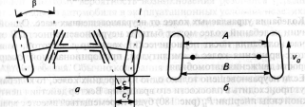
Рис. 178. Развал (в) и схождение (б) управляемых колес
3. Установка колес с развалом предотвращает обратный развал при |П11осс цапф шкворней.
Для современных тракторов
с = Ь/2- 10...30
мм (здесь Ь —
ширина шины), а угол ![]() = 1,5...4°.
= 1,5...4°.
Развал управляемых колес плохо сочетается со сдваиванием колес, применяемым на тракторах с целью повышения их тягово-сцепных гпойств и снижения давления на почву.
Схождение колес. Наклон колеса к поверхности качения вызывает боковой увод его в сторону наклона, т. е. колеса стремятся разойтись: левое — налево, правое — направо. Поверхность качения колеса формирует поверхность конуса, а не цилиндра, что вызывает проскальзывание и интенсивное изнашивание шин. Для устранения этого явления вводят схождение колес (рис. 17, б). Расстояние А между колесами впереди делают меньше (на 1.. .4 мм в автомобилях и на 2.. .8 мм в тракторах), чем расстояние В сзади. Касательные и боковые реакции дороги, а также удары, действующие на колеса, стремятся вызвать их отрицательное схождение. В связи с наличием зазоров и рулевой трапеции и других соединениях управляемым коле-I им придается несколько большее схождение, чем необходимо из условий компенсации только развала колес.
Схождение колес повышает коэффициент сопротивления качению, как показано на рисунке 179.
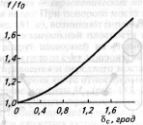
Рис. 179 Зависимость относительного увеличения сопротивления качению управляемых колёс от угла схождения колёс