ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 22.10.2024
Просмотров: 175
Скачиваний: 0
СОДЕРЖАНИЕ
6.Назначение и устройство системы охлаждения двигателя.Типы.Достоинства и недостатки.
11. Экологические показатели двс: токсичность и шумность. Нормы предельной токсичности евро в России
12) Методы испытаний и характеристики, необходимые для регулировки топливной аппаратуры дизеля.
3.3. Проверка клапанных пар на суммарную герметичность
15. Силы, действующие в кшм. Их влияние на нагруженность и износ деталей кшм.
16). Классификация автомобилей. Компоновка автомобилей.
17) Классификация тракторов. Компоновка тракторов.
18).Внешние силы, действующие на трактор (автомобиль). Тяговый баланс.
19. Работа ведомого колеса. Сила и коэффициент сопротивления
20. Работа ведущего колеса. Коэффициент сцепления, буксования/
,.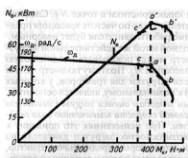
Рис. 77. Влияние нелинейности регуляторной характеристики двигателя на зависимости Ne и wд тяговой характеристики трактора
Тяговый КПД трактора. Регламентируемый стандартом метод экспериментального определения КПД трактора заключается в следующем. При разной тяговой нагрузке измеряют средние за опыт значения тягового усилия Ркр на крюке и скорости VTp движения трактора. Далее расчитывают тяговую мощность, находят ее максимальное значение, соответствующее точке Ь' (см. рис. 77),
![]()
Тяговый КПД
![]()
27
Способы снижения уплотнения почвы тракторными движителями.
Снижение вредного воздействия тракторных движителей на почву достигается за счет применения трактора, тип и параметры движителя которого соответствуют данному агрофону, а также правильным выбором состава машинно-тракторного агрегата.
Наиболее радикальное направление снижения вредного воздействия движителей на почву — применение гусеничных тракторов. Однако они менее универсальны, чем колесные, не могут перемещаться по дорогам с твердым покрытием, что препятствует их широкому использо-
ванию в сельскохозяйственных зонах с развитой сетью благоустроенных дорог. В связи с этим проводят большие исследовательские работы по применению резиновой гусеницы. Образцы бесконечной резиновой ленты, армированной стальными тросами, разработаны в Японии и в нашей стране. Тракторы с такой гусеницей (вместо стальной) созданы в НАТИ и проходят испытания.
Вредное воздействие колесных движителей на почву может быть снижено до уровня вредного воздействия гусеничных тракторов несколькими способами. К их числу относятся: сдваивание колес, применение шин низкого давления и арочных шин, создание колесных тракторов колесной формулы 6К6. Модель трактора с колесной формулой 6К6 считают перспективной. Положительные эксплуатационные свойства такого трактора, в том числе агротехнические, повышаются существенным образом, если третий ведущий мост сделать отсоединяемым.
С целью снижения уплотнения почвы колесными тракторами следует применять шины низкого давления, позволяющие работать при давлении воздуха 0,08...0,12 МПа. Для энергетических средств транспорт-но-технологического назначения наиболее эффективным способом снижения вредного воздействия на почву является применение арочных шин. Так, высокую оценку в эксплуатации получила созданная на основе трактора Т-150К машина ЭСВМ-7 для внесения удобрений. Она оснащена арочными шинами шириной 1200 мм и способна перемещаться по вспаханному переувлажненному полю со скоростью 30 км/ч, не создавая при этом глубокой колеи.
Вредное воздействие движителей на почву можно снизить, применяя широкозахватные и комбинированные агрегаты. При работе с широкозахватными агрегатами вредное воздействие движителей на почву уменьшается за счет снижения относительной площади вытаптывания обработанного поля движителями трактора по мере увеличения ширины захвата агрегата. Применение комбинированных агрегатов связано с изменением технологического процесса обработки почвы и возделывания культур. Влияние их на почву рассмотрено далее.
28
Устойчивость от сползания трактора, стоящего поперек склона, считают достаточной, если составляющая силы тяжести трактора, параллельная склону, не больше суммы боковых реакций почвы левого Z2 и правого Z1 бортов.
Gтрsinβφ![]() Z1+Z2
Z1+Z2
Предельное значение боковых реакций почвы на всех колесах можно выразить через вес:
Z1+Z2= φкGтрcosβφ
Тогда:Gтрsinβφ![]() φкGтрcosβφ
φкGтрcosβφ
Или tgβφ![]() φк
φк
Таким образом, сползание трактора со склона не произойдет, если коэффициент сцепления колес с почвой больше тангенса угла наклона поверхности, на которой стоит машина.
Критерием устойчивости против опрокидывания является значение нормальной реакции почвы на колеса машины, расположенные на стороне, противоположной опрокидыванию, Трактор не опрокинется при условии:
Y1![]() 0
0
В качестве оценочного показателя поперечной устойчивости машины принимают предельный статический угол βlim поперечного уклона, на котором она может стоять без опрокидывания.
tgβlim = 0.5Bk/hц.
Для колесного трактора принимают, что точка возможного опрокидывания лежит на середине ширины профиля колеса
Для гусеничного трактора возможной осью опрокидывания является внешняя кромка гусеницы. Тогда:
tgβlim = 0.5(Bk + bг) /hц.
где bг – ширина гусеницы.
На поперечную устойчивость машины при криволинейном движении существенно влияют инерционные силы, возникающие от поворота.
Рассмотрим простейший
случай поворота колесной машины на
горизонтальном участке с установившейся
скоростью и постоянным радиусом
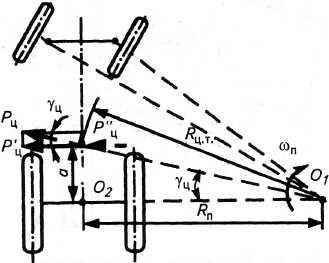
вращения вокруг центра.. При повороте
возникает результирующая центробежная
сила Рц, приложенная к центру тяжести
машины и направленная по радиусу от
центра. С увеличением скорости движения
и уменьшением радиуса поворота
центробежная сила резко возрастает.
Так, при равномер-
Переход от прямолинейного движения к установившемуся криволинейному с постоянным радиусом поворота сопровождается непрерывным изменением положения центра О\ и радиуса поворота. Происходит ускоренное вращение центра тяжести машины вокруг точки 02> вследствие чего возникает инерционная сила При входе машины в поворот направление действия этой силы такое же, как и силы Р'п, а при выходе из поворота — противоположное.
Факторы (подвеска, эластичность шин, касающиеся оси мостов), снижающие статическую поперечную устойчивость, ухудшают поперечную устойчивость автомобиля и на повороте. Пример отрицательного
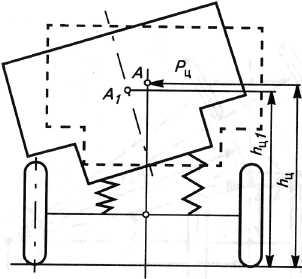
влияния подвески на поперечную устойчивость машины показан на рисунке. При повороте координата центра тяжести смещается не только в сторону опрокидывания машины из точки А в точке А1 но и понижается на величину hц — hц1.
29
Проходимость автомобиля. Под проходимостью автомобиля понимают его способность перемещаться без остановки, преодолевая дорожные препятствия двух типов: препятствия профильного характера (стенка канавы, камни и т. д.) и участки дороги со слабонесущим опорным слоем почвы или грунта. Поэтому проходимость автомобиля принято называть дорожной, подразделяя ее на профильную и опорно-сцепную.
Профильная проходимость машины определяется главным образом геометрическими размерами и конкретными конструктивными особенностями, позволяющими машине преодолевать профильные препятствия.
Опорно-сцепная проходимость зависит от свойств движителей и тяго-во-сцепных качеств машины в целом.
Различают автомобили ограниченной, повышенной и высокой проходимости.
Автомобили ограниченной проходимости — это дорожные автомобили, эксплуатируемые на дорогах с твердым покрытием и грунтовых сухих дорогах. С дополнительными приспособлениями, повышающими главным образом сцепные свойства движителей, они могут работать в сложных дорожных условиях.
Автомобили повышенной проходимости представляют собой, как правило, модификации основных моделей автомобилей ограниченной проходимости, отличаясь от них некоторыми конструктивными особенностями: приводом на все колеса, пониженным или регулируемым давлением воздуха в шинах, блокируемым дифференциалом. Некоторые машины оснащают лебедками для самоподтягивания и другими приспособлениями для преодоления препятствий.
Автомобили высокой проходимости должны обладать способностью преодолевать различные рельефные препятствия — канавы, бревна, пни, камни, вертикальные стенки и т. д. Специальные машины создают также для песков, заболоченной местности, условий вечной мерзлоты и Крайнего Севера. Такие автомобили отличаются от автомобилей ограниченной проходимости существенными конструктивными особенностями. Их комплектуют специальными шинами.
Профильная и опорно-сцепная проходимости характеризуются наличием свободной толкающей силы Fn. Когда в общем тяговом балансе сила Fn равна нулю или несколько больше его, то машина еще может перемещаться. Если толкающая сила меньше нуля, машина теряет подвижность. Это условие можно выразить следующим уравнением:
PK-(Pf+Pi) = Fn≥0.
В качестве оценочного критерия удобнее пользоваться безразмерной величиной. Поэтому тягово-сцепные свойства и опорно-сцепную проходимость оценивают по коэффициенту запаса тяговой силы
kТ = PкPΨ.
Коэффициент запаса тяговой силы — это важный показатель степени совершенства машины, соответствия ее функциональному назначению.
Из условий проходимости коэффициент запаса тяговой силы должен быть больше или равен единице: кТ > 1.
Показатели профильной проходимости. Размеры и формы препятствий, вызывающих потерю проходимости, очень разнообразны. Однако все они могут быть приведены, по М. Г. Беккеру, к типу уступ и выступ .Препятствия этих двух типов встречаются раздельно или в сочетании. Тогда они образовывают канаву или насыпь.
Профильная проходимость машины на конкретной дороге определяется ее компоновкой, геометрическими параметрами, диаметром и числом колес, в том числе ведущих.
Основные геометрические параметры автомобиля в соответствии с государственным стандартом — дорожный просвет, углы переднего и заднего свесов, продольный радиус проходимости.
Дорожный просвет — это расстояние /гпр (рис. 143) от дороги до наиболее низкой точки автомобиля, расположенной между колесами. В таблице 5 даны значения дорожного просвета для различных автомобилей.
Углы переднего У] и заднего у2 свесов представляют собой углы между плоскостью, касающейся беговой дорожки шины и наиболее выступающей точки машины
Продольный радиус Rа на рисунке характеризует проходимость автомобиля по неровностям. Чем меньше продольный радиус проходимости при прочих одинаковых геометрических параметрах машины, тем большее препятствие может преодолеть автомобиль, не зависая на нем.
30
Плавность хода и трактора, и автомобиля оценивают по влиянию колебаний главным образом на физическое состояние и здоровье человека. Наряду с этим имеются и другие важные показатели работы машины, зависящие от плавности хода. Так, при эксплуатации грузовых автомобилей на дорогах, покрытия которых с большими неровностями, скорость движения снижается на 40...50 %, межремонтный пробег на 35...40 %, расход топлива увеличивается на 50...70 %, а себестоимость перевозок — на 50...60 %.
Колебания от неровностей профиля дороги и агрофонов составляют некоторую часть общего спектра частот колебаний. Мероприятия по защите водителя от неровностей поля и дороги также составляют лишь часть общих мероприятий. Поэтому проблема плавности хода относится к области динамики машины. Показатели плавности хода являются исходными для общей оценки виброзащиты и должны соответствовать нормам, по которым оценивают свойства безопасности трактора и автомобиля для обслуживающего их персонала.
Водитель и пассажиры оценивают плавность хода субъективно, по собственным ощущениям, которые зависят от интенсивности колебаний и длительности их воздействия. Экспериментально установлено, что хорошая плавность характеризуется вертикальными колебаниями, свойственными человеческому телу при ходьбе 60...90 шагов в минуту, т. е. с частотой 1... 1,5Гц. Организм человека наиболее чувствителен к вертикальным колебаниям в диапазоне частот 4...8 Гц и горизонтальным — в диапазоне 1...2 Гц. При этом колебания воспринимаются по-разному, в зависимости от частот. Низкие частоты воспринимаются пропорционально ускорениям, средние — скоростям, а высокие — перемещениям
МЕРОПРИЯТИЯ ПО ПОВЫШЕНИЮ ПЛАВНОСТИ ХОДА АВТОМОБИЛЯ
Ход подвески. Основной параметр подвески, определяющий плавность хода машины, — ее максимальное перемещение. Оно зависит от расстояния между верхним и нижним ограничителями. График, выражающий зависимость деформации упругого элемента подвески от приложенной статистической нагрузки, называют характеристикой подвески (рис. 136).
