Файл: Контрольные работы. Теория автоматического управления.docx
ВУЗ: Пермский национальный исследовательский политехнический университет
Категория: Методичка
Дисциплина: Теория автоматического управления
Добавлен: 19.10.2018
Просмотров: 5340
Скачиваний: 88
-
Без перерегулирования
С 20% - ным перерегулированием
Регулятор
k
Ти
Тд
k
Tи
Тд
П
0,3/а
0,7/a
ПИ
0.6/a
4
 /k
/k0,7/a
2,3
/kПИД
0,95/a
2,4
/k0,42
k1,2/a
2,0
/k0,42
k
Пример 3
Передаточная функция объекта имеет вид
Определить настройки параметров ПИД-регулятора по отклику на изменение уставки метода CHR.
1. Определяем параметр а из выражения:
 =
= =0,143.
=0,143.
2. Определяем параметры ПИД – регулятора по формулам таблицы 3
( без перерегулирования ):
kp = 0,6/a = 4,196;
Ти
= 10
/kp
=10*0,4/4,196 = 0,95c;
ku
= 1/ Ти
= 1,0526c-1;
Тд
= 0,5kp
= 0,5*0,4*4,196 = 0,839c;
kд
= Тд
= 0,839c.
3. Составляем скрипт для определения переходных характеристик исходной и
скорректированной замкнутых систем.
kp=4.196;
ki=1.0526;
kd=0.839;
numo=[1];
deno=[2.8 1];
Wo=tf(numo,deno)
[nums,dens]=pade(0.4,2)
Ws=tf(nums,dens)
numi=[ki];
deni=[1 0];
Wi=tf(numi,deni)
numd=[kd 0];
dend=[1];
Wd=tf(numd,dend)
Wsr=minreal(Wo*Ws/(1+Wo*Ws))
step(Wsr)
%Wsrpid=minreal((kp+Wi+Wd)*Wo*Ws/(1+(kp+Wi+Wd)*Wo*Ws))
%step(Wsrpid)
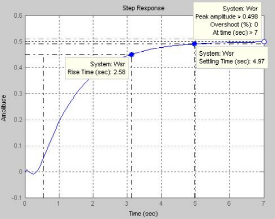
4. Определяем переходную характеристику исходной (нескорректированной) системы, произведя «Пуск» скрипта п.3 в Matlab.
5. Определяем переходную характеристику скорректированной системы, сняв знак % в последних двух строках скрипта и установив % в двух предыдущих строках.
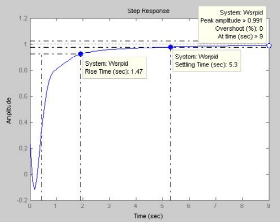
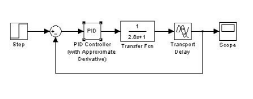
6. Модель скорректированной системы в Simulink и графики переходных характеристик
исходной и скорректированной систем приведены на рисунках.
4. Настройка параметров регуляторов по критерию модульного (технического) оптимума.
При проектировании и наладке систем управления объектами, не содержащими чистого запаздывания, наибольшее применение получили два критерия – модульный оптимум (МО) и симметричный оптимум (СО) (рис. 1).
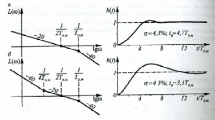
Рис.1. Частотные и переходные характеристики одноконтурной САУ, настроенной по критериям модульного (а) и симметричного (б) оптимумов
Критерий
модульного
оптимума,
называемый также критерием амплитудного,
или технического, оптимума, заключается
в выполнении следующих требований к
форме амплитудной характеристики
замкнутой системы по каналу управления
 (рис.2): характеристика в как можно более
широком диапазоне частот должна быть
горизонтальной и равна единице, наклонный
участок характеристики должен быть как
можно более крутопадающим, т. е. критерий
модульного оптимума требует, чтобы
настраиваемая система приближалась по
своим частотным передаточным свойствам
к идеальному фильтру низкой частоты,
имеющему прямоугольную частотную
характеристику.
(рис.2): характеристика в как можно более
широком диапазоне частот должна быть
горизонтальной и равна единице, наклонный
участок характеристики должен быть как
можно более крутопадающим, т. е. критерий
модульного оптимума требует, чтобы
настраиваемая система приближалась по
своим частотным передаточным свойствам
к идеальному фильтру низкой частоты,
имеющему прямоугольную частотную
характеристику.
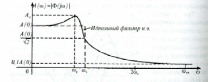
Рис. 2. Амплитудная частотная характеристика замкнутой системы по каналу
управления

Тогда,
при отсутствии помехи на входе, система
(рис. 3) будет наилучшим образом
воспроизводить задающее воздействие
 и подавлять возмущение
и подавлять возмущение
 .
При наличии на входе высокочастотной
помехи частоту пропускания
.
При наличии на входе высокочастотной
помехи частоту пропускания
 системы
выбирают тоже достаточно большой, но
по компромиссному условию совместной
фильтрации всех действующих сигналов.
системы
выбирают тоже достаточно большой, но
по компромиссному условию совместной
фильтрации всех действующих сигналов.
Рис. 3. Алгоритмическая структура исходной САУ
Настройка системы по критерию МО обеспечивает малое перерегулирование и достаточно быстрое протекание переходного процесса:
 .
(1)
.
(1)
Эти верхние пределы показателей качества соответствуют идеальному фильтру низкой частоты, который практически нереализуем.
Амплитудную характеристику, близкую по форме к прямоугольной характеристике идеального фильтра, имеет фильтр Баттерворта, у которого АЧХ
 .
(2)
.
(2)
На практике обычно используют фильтры с порядком n = 2…8.
Колебательная модель
 (3)
(3)
замкнутой
системы при коэффициенте демпфирования
 имеет
амплитудную характеристику
имеет
амплитудную характеристику
 ,
(4)
,
(4)
отсюда
 ,
(5)
,
(5)
соответствующую частному случаю фильтра (2) с n=2.
Таким образом, в рамках приближённой модели (3) критерию МО соответствует значение коэффициента демпфирования
 (6)
(6)
при этом главные показатели качества
 ,
(7)
,
(7)
где
 -
частота собственных незатухающих
колебаний замкнутой системы
-
частота собственных незатухающих
колебаний замкнутой системы
(при
 ),
характеризующая полосу пропускания
фильтра;
),
характеризующая полосу пропускания
фильтра;
 -
постоянная времени
-
постоянная времени
разомкнутого контура системы.
Для колебательной модели (3) нестрогий критерий МО обеспечивает одновременно минимум квадратичной интегральной оценки
 (8)
(8)
и улучшенной интегральной оценки
 (9)
(9)
с
весовым коэффициентом
 .
.
При настройке систем более высокого порядка (n > 2) по критерию МО можно обходиться и без приближённой модели (3). Для этого передаточную функцию замкнутой системы по каналу управления
 (10)
(10)
приводят к нормированному виду
 ,
(11)
,
(11)
где
 =
= -
оператор Лапласа, соответствующий
безразмерному (относительному) времени
-
оператор Лапласа, соответствующий
безразмерному (относительному) времени
 =
= ;
;
 -
масштабный множитель
-
масштабный множитель
 ;
(12)
;
(12)
безразмерные коэффициенты
 .
(13)
.
(13)
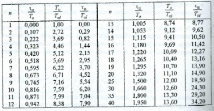
Чтобы обеспечить желаемую форму амплитудной характеристики, близкую к прямоугольной, коэффициенты нормированной функции (11) выбирают в соответствии со стандартными полиномами Баттерворта (табл. 1).
Таблица 1
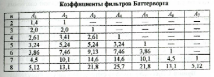
При
таких сочетаниях коэффициентов
 амплитудная характеристика фильтра
принимает вид (2), причём
амплитудная характеристика фильтра
принимает вид (2), причём
 ,
а относительная частота
,
а относительная частота
 соответствует
значению амплитудной функции, равному
0,7 (при
соответствует
значению амплитудной функции, равному
0,7 (при
 ).
).
Масштабный
множитель
 не влияет на форму переходного процесса
и служит обобщённой мерой быстродействия
системы. Его значение можно выбрать,
исходя из требуемых показателей
быстродействия
не влияет на форму переходного процесса
и служит обобщённой мерой быстродействия
системы. Его значение можно выбрать,
исходя из требуемых показателей
быстродействия
 и
и
 ,
по следующим приближённым формулам:
,
по следующим приближённым формулам:
 ,
(14)
,
(14)
где n – порядок полинома Баттерворта.
Найденное
по этим формулам значение
обеспечивают
за счёт выбора по формуле (12) соответствующего
общего передаточного коэффициента
разомкнутого контура k,
который, как известно, входит в свободный
член
 :
:
 -
для статических систем,
-
для статических систем,
 -
для астатических систем.
-
для астатических систем.
Применительно к колебательной модели (3) параметры фильтра Баттерворта
 .
(15)
.
(15)
В системах, параметры которых выбраны в соответствии со стандартными полиномами Баттерворта, перерегулирование
 (16)
(16)
Указанные
выше значения длительности переходного
процесса
и перерегулирования
 строго выдерживаются только в тех
случаях, когда числитель передаточной
функции (10) не содержит слагаемых с
оператором p.
Тем не менее и для систем с более сложным
полиномом числителя можно пользоваться
рекомендуемыми значениями коэффициентов
Баттерворта. При этом также обеспечивается
достаточно хорошее качество переходного
процесса. Кроме того, настройки,
соответствующие полиномам Баттерворта,
могут использоваться как исходные,
отправные для отыскания оптимальных
настроек систем, передаточные функции
которых имеют числитель в виде полинома
от p.
строго выдерживаются только в тех
случаях, когда числитель передаточной
функции (10) не содержит слагаемых с
оператором p.
Тем не менее и для систем с более сложным
полиномом числителя можно пользоваться
рекомендуемыми значениями коэффициентов
Баттерворта. При этом также обеспечивается
достаточно хорошее качество переходного
процесса. Кроме того, настройки,
соответствующие полиномам Баттерворта,
могут использоваться как исходные,
отправные для отыскания оптимальных
настроек систем, передаточные функции
которых имеют числитель в виде полинома
от p.
Пример 4
Пусть исходная часть системы, состоящая из функционально необходимых элементов, описывается передаточной функцией
 ,
(17)
,
(17)
где
 1
с,
1
с,
 2
с.
2
с.
Требуется
определить настроечные параметры
 и
и
 последовательно
включаемого корректирующего устройства
последовательно
включаемого корректирующего устройства
 (18)
(18)
и
общий передаточный коэффициент k,
обеспечивающие критерий МО и желаемую
длительность переходного процесса
 с.
с.
Передаточная функция замкнутой системы по каналу управления
 .
(19)
.
(19)
Не
обращая внимания на наличие полинома
в числителе этой передаточной функции,
будем подбирать настроечные параметры
так, чтобы безразмерные коэффициенты
 полинома
знаменателя соответствовали фильтру
Баттерворта.
полинома
знаменателя соответствовали фильтру
Баттерворта.
Определим
вначале масштабный множитель
,
ориентируясь на приближённое соотношение
(14):
 с.
(20)
с.
(20)
Теперь в соответствии с формулой (12) можно найти необходимое (для заданного быстродействия) значение общего передаточного коэффициента:
 с-1.
(21)
с-1.
(21)
Для
 оба
безразмерных коэффициента Баттерворта,
согласно табл. 1, должны быть равны 2:
оба
безразмерных коэффициента Баттерворта,
согласно табл. 1, должны быть равны 2:
 ,
(22)
,
(22)
 .
(23)
.
(23)
Решая
совместно эти два уравнения, получим
 с
и
с
и
 с.
с.
Применим изложенный метод оптимизации амплитудной характеристики для расчёта настроечных параметров типовых регуляторов:
П
– регулятор
 ;
(24)
;
(24)
И
– регулятор
 ;
(25)
;
(25)
ПИ
– регулятор
 ;
(26)
;
(26)
ПД
– регулятор
 ;
(27)
;
(27)
ПИД
– регулятор
 (28)
(28)
или
 ,
(29)
,
(29)
используемых для управления следующими инерционными объектами второго – третьего порядков без запаздывания:
 ;
(30)
;
(30)
 ;
(31)
;
(31)
 ;
(32)
;
(32)
 .
(33)
.
(33)
Типовые
регуляторы обычно используются для
управления инерционными объектами
второго – третьего порядков без
запаздывания, в которых
 ,
причём в общем случае сомножитель с
наименьшей постоянной времени
,
причём в общем случае сомножитель с
наименьшей постоянной времени
 приближённо заменяет собой несколько
инерционных звеньев с ещё более малыми
постоянными времени
приближённо заменяет собой несколько
инерционных звеньев с ещё более малыми
постоянными времени
 ,т.е.
,т.е.
 .
(34)
.
(34)
Приведенные в табл. 2 модели обычно используются для приближенного описания объектов, входящих в типовые контуры регулирования систем управления электроприводами (контуры регулирования напряжения, тока и частоты вращения).
Таблица 2
Для снижения и устранения больших перерегулирований, которые возникают в системе, настроенной по критерию СО, применяют сглаживание ступенчатого задающего воздействия путём включения на входе системы специального фильтра – инерционного звена первого порядка
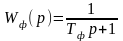 ,
(35)
,
(35)
где
 для астатических объектов (30) и (32) и для
статических объектов (31) и (33) с
для астатических объектов (30) и (32) и для
статических объектов (31) и (33) с
 .
При меньших отношениях постоянную
времени
.
При меньших отношениях постоянную
времени
 можно
уменьшить. Естественно, что быстродействие
системы при включении сглаживающего
фильтра снижается.
можно
уменьшить. Естественно, что быстродействие
системы при включении сглаживающего
фильтра снижается.
Используем общие принципы для выбора настроечных параметров типовых ПИ - и ПИД – регуляторов, которые обычно используются для регулирования следующих инерционных объектов первого и второго порядков с запаздыванием:
 ;
(36)
;
(36)
 ;
(37)
;
(37)
 ,
(38)
,
(38)
где
 ,
а параметры
,
а параметры
 и
и
 определяются экспериментально –
проведением касательной к переходной
характеристике объекта
определяются экспериментально –
проведением касательной к переходной
характеристике объекта
(рис. 4, табл. 3).
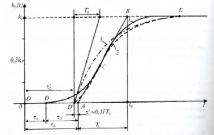
Рис. 4. Переходные характеристики реального объекта управления (1) и его приближённых моделей второго порядка (2) и первого порядка с запаздыванием (3)
Таблица 3
Связь
между параметрами s-образной
переходной характеристики (рис. 4) и
параметрами аппроксимирующей модели

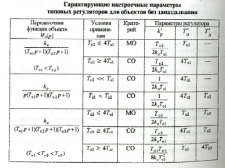
Рекомендации по выбору настроечных параметров являются базовыми, отправными, которые подлежат уточнению в зависимости от точки приложения возмущения и от требований, предъявляемых к переходному процессу в системе регулирования.
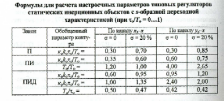
В
табл. 4 приведены эмпирические формулы,
в которых обобщены результаты
экспериментальных исследований по
определению настроечных параметров
типовых регуляторов для объектов с
запаздыванием. Параметры определены
путём моделирования систем при ступенчатых
изменениях задающего R(p)
и возмущающего F(p)
воздействий. Обеспечиваемым показателем
качества системы является перерегулирование

(0 или 20%) на выходе объекта.
Формулы
для канала управления получены без
учёта ограничения на величину управляющего
воздействия, необходимого для обеспечения
заданного показателя
.
Если
такое ограничение наложено, то приходится
уменьшать коэффициент регулятора (без
изменения параметра
 ),
например, при максимально допустимом
значении управляющего воздействия
),
например, при максимально допустимом
значении управляющего воздействия
 .
Передаточный коэффициент ПИ – регулятора
следует выбирать по формуле
.
Передаточный коэффициент ПИ – регулятора
следует выбирать по формуле
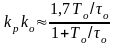 .
(39)
.
(39)
Таблица 4
Моделирование на ЭВМ и анализ переходных процессов, происходящих в замкнутой системе по каналам управления и возмущения при различных настройках, позволяют сделать следующие выводы о влиянии критериев настройки и параметров регулятора на показатели качества переходного процесса и о достоинствах и недостатках самих критериев:
1.
Увеличение передаточного коэффициента
 приводит
к уменьшению времени нарастания
приводит
к уменьшению времени нарастания
 и повышению перерегулирования
.
и повышению перерегулирования
.
2.
Увеличение постоянной интегрирования
 даёт повышение длительности
даёт повышение длительности
 и снижение перерегулирования
.
и снижение перерегулирования
.
3.
Критерий МО предпочтителен при оптимизации
систем, отрабатывающих в основном
изменения задающего воздействия
 ,
т.е. следящих и программных систем.
,
т.е. следящих и программных систем.
4.
Критерий СО целесообразно применять
при настройке систем, которым чаще
приходится реагировать на возмущающие
воздействия
 ,
т.е. стабилизирующих систем.
,
т.е. стабилизирующих систем.
5. Оба критерия обеспечивают по каналу возмущения приблизительно одинаковые значения первого максимального отклонения yм:
 ,
(40)
,
(40)
где
коэффициент 0,85 соответствует отношению
 ,
а 1,45 – отношению
,
а 1,45 – отношению
 .
.
6.
При настройке по критерию МО относительная
длительность переходного процесса по
каналу возмущения увеличивается с
ростом отношения
 :
:
 ,
(41)
,
(41)
а по критерию СО – уменьшается:
 ,
(42)
,
(42)
где
соответствует моменту достижения
регулируемой величины значения
 (при
(при
 ).
).
7.
При
 длительности переходного процесса по
каналу возмущения для обоих критериев
одинаковы. При
длительности переходного процесса по
каналу возмущения для обоих критериев
одинаковы. При
 лучшее быстродействие даёт МО, а при
лучшее быстродействие даёт МО, а при
 -
критерий СО.
-
критерий СО.