ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 285
Скачиваний: 0
СОДЕРЖАНИЕ
Глава I особенности ремонта электрооборудования и автоматики
§ 1. Организация ремонта электрооборудования
§ 2. Виды ремонта и общая схема технологического процесса
Глава II технология ремонта систем электрооборудования и автоматики
§ 1. Дефекты систем и их классификация
§ 2. Характеристика систем электрооборудования и автоматики как объектов ремонта
§ 3. Методика обнаружения неисправных агрегатов и узлов
§ 4. Замена агрегатов электрооборудования и автоматики
§ 5. Ремонт электромонтажных комплектов и проводов бортовой сети
§ 1. Начальные этапы технологического процесса ремонта аккумуляторных батарей
§ 2. Дефектация, ремонт и изготовление деталей и узлов
§ 3. Сборка и испытание аккумуляторных батарей
Глава IV технология ремонта электрических машин
§ 1. Начальные этапы технологического процесса ремонта электрических машин
§ 2. Дефектация, ремонт, изготовление деталей и узлов
§ 3. Сборка и испытание электрических машин
Глава V технология ремонта аппаратов регулирования и управления
§ 1. Начальные этапы технологического процесса ремонта аппаратов регулирования и управления
§ 2. Дефектация и ремонт узлов
§ 3. Сборка и предварительная регулировка аппаратов
Глава V технология ремонта аппаратов регулирования и управления
Для аппаратов регулирования и управления так же, как и для остальных агрегатов танков, различают два вида ремонта: текущий и капитальный.
При капитальном ремонте производится полная разборка аппарата, дефектация всех его узлов и деталей, ремонт или замена всех деталей и узлов, не соответствующих требованиям ТУ. Ремонт заканчивается испытаниями аппарата в режиме его работы в соответствующей системе электрооборудования.
Текущий ремонт состоит в замене только отказавших узлов и деталей. Причем отказавший узел (или деталь) может быть выявлен или непосредственно на танке, или в процессе предварительной оценки технического состояния вне танка. Ремонт заканчивается проверкой работоспособности аппарата в режиме, в той или иной степени приближенном к режиму работы его на танке.
Общая схема технологического процесса капитального ремонта аппаратов регулирования и управления (АР и У) включает те же этапы и в той же последовательности, что и общая схема технологического процесса капитального ремонта других агрегатов электрооборудования танка. Однако содержание этапов при ремонте электрических машин, с одной стороны, и аппаратов регулирования и управления, с другой — различно.
Для полного ознакомления с технологией ремонта аппаратов регулирования и управления рассмотрим схему технологического процесса их капитального ремонта, останавливаясь на особенностях содержания каждого этапа при текущем ремонте и на отличиях в выполнении каждого этапа при ремонте различных типов АР и У.
§ 1. Начальные этапы технологического процесса ремонта аппаратов регулирования и управления
Эти этапы при капитальном и текущем ремонте АР и У преследуют те же цели и выполняются в том же порядке, что при ремонте электрических машин: при капитальном ремонте основная задача этапа приемки состоит в проверке правильности заполнения документации на агрегаты и узлы систем автоматики и комплектности АР и У; при текущем ремонте задачи этапа приемки более сложны и ответственны. Кроме проверки комплектности, необходимо выявить характер повреждений или неисправностей, а также возможность и целесообразность ремонта аппарата силами того или иного ремонтного подразделения или части.
Таким образом, проверка технического состояния составляет основное содержание этого этапа при текущем ремонте АР и У.
Если для электрических машин в качестве основного метода предварительной проверки технического состояния применяют испытание в режиме двигателя на холостом ходу, то для аппаратов регулирования и управления в зависимости от их вида, схемы, конструкции существуют различные методы. Наиболее часто используются косвенная комбинированная проверка, проверка исправности электрических цепей, имитация режимов работы аппарата в системе.
Вне зависимости от избранного метода проверку технического состояния обычно начинают со снятия крышек и внешнего осмотра узлов и элементов принимаемого в ремонт аппарата. Эта операция позволяет иногда сразу выявить некоторые неисправности: обрывы в местах пайки, сгоревшую изоляцию и т. п. Если таковые 560
выявить не удается, то приступают к проверке технического состояния тем или иным методом.
Одним из примеров косвенной комбинированной проверки является проверка исправности обмоток и подвесной системы якорька поляризованного реле переменным током по «зуммерению» (рис. 294). В случае неисправности обмотки или подвесной системы якорька зуммерения не будет.
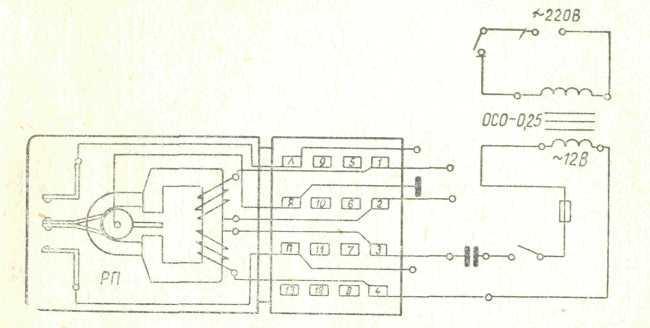
Рис. 294. Схема проверки поляризованного реле
Проверка исправности электрических цепей применяется значительно чаще. Этот метод используют для оценки технического состояния таких агрегатов и узлов, как пульты и коробки управления, распределительные коробки, различные блокировочные приборы! ограничители углов и т. п. При использовании этого метода оценка исправности электрических цепей может быть осуществлена двумя способами: или замером величины сопротивления проверяемых цепей и их элементов, или подключением этих цепей к источникам через индикаторы наличия тока. Эти способы могут применяться в сочетании друг с другом.
В качестве примера применения этого метода можно рассмотреть схему проверки пульта управления (рис. 295).
Здесь источником тока являются танковые аккумуляторные батареи, включенные на 24 В, а индикаторами наличия тока — электрические лампочки. Потенциометры наведения проверяют замером величин их сопротивлений с помощью омметра.
Исправность электрических цепей обмоток и контактов реле обычно проверяют подключением обмотки реле к источнику тока (рис. 296). При этом в цепи контактов включают электрические лампочки. Питание лампочек может осуществляться или от этого же, или от другого источника. В случае исправности реле и его цепей при прохождении тока по обмотке реле загораются или гаснут лампочки, включенные в цепи соответственно нормально разомкнутых или нормально замкнутых контактов.
При проверке пропусканием тока исправности электрических цепей, содержащих сопротивления, диоды, обмотки и другие подоб-
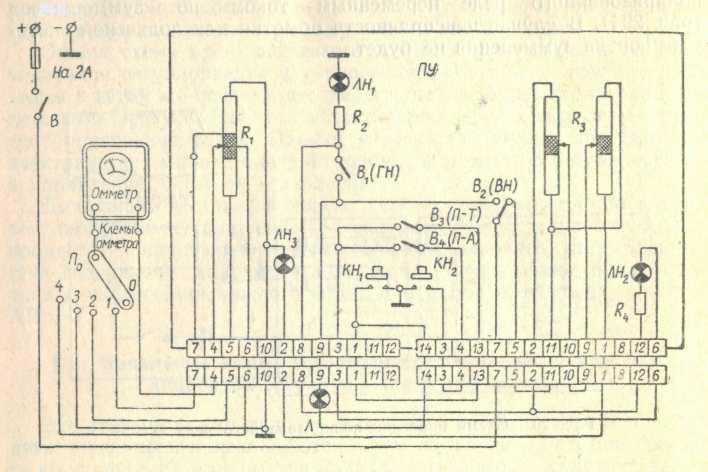
Рис. 295. Схема проверки цепей пульта управления
ные элементы, необходимо обращать внимание на правильность выбора величин тока, а также напряжения и мощности индикаторных лампочек. При проверке АР и У танкового электрооборудования и автоматики нормальные величины токов в проверяемых обмотках, как правило, обеспечиваются использованием источников с напряжением, равным напряжению бортовой сети.
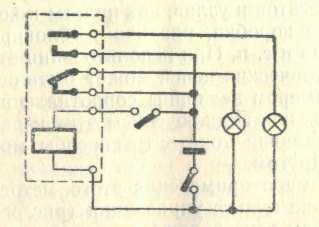
Рис. 296. Схема проверки цепей реле
При проверке исправности цепей, содержащих сопротивления большой величины (свыше 100 Ом) и малой мощности (менее 1 Вт), индикаторные лампочки, как правило, не применяют, а замеряют величины сопротивлений омметром. В этом случае, пользуясь развернутыми монтажными или принципиальными схемами аппаратов, необходимо обращать внимание на отсутствие цепей, параллельных цепи проверяемого сопротивления. В случае, когда такие параллельные цепи есть, необходимо их отпаять.
Имитация режимов работы в соответствующей системе танка широко применяется при проверке технического состояния относительно сложных аппаратов регулирования и управления, таких, как гироскопические приборы, электронные и электронно-магнитные усилители, контактные и контактно-транзисторные реле-регуляторы.
Этот метод оказывается единственно возможным, когда заключение о техническом состоянии может быть сделано только на основании измерения тех или иных параметров аппарата.
При разработке схем для проверки аппаратов этим методом необходимо стремиться, с одной стороны, возможно полнее воспроизвести режим работы, а с другой — добиться этого возможно более простыми средствами, доступными для использования в войсковых условиях.
Перечисленные аппараты являются звеньями систем автоматического регулирования. Они работают в условиях постоянно меняющихся внешних сигналов. Точное воспроизведение динамики их работы вне систем требуют достаточно сложной аппаратуры и в войсковых условиях, как правило, неосуществимо. Поэтому в большинстве случаев ограничиваются испытаниями этих аппаратов в статическом режиме. Однако отход от реального режима должен обязательно компенсироваться, учитываться либо схемными решениями, либо изменением величин проверяемых параметров.
Таким образом, можно сформулировать основные требования к схемам проверки технического состояния звеньев систем автоматического регулирования имитацией режимов их работы.
1. Максимально возможное приближение режима испытаний к реальному режиму работы на тайке:
—по характеру (род тока, частота и т. п.) и величине входных сигналов;
—по характеру (индуктивная, емкостная, активная) и величине нагрузки на выходе;
—по характеру и величине питающих напряжений (питание гиромоторов, анодное питание ламп, питание реле и т. п.).
2. Обеспечение возможности компенсации отклонений режима испытания от режима проверки.
3. Простота применяемого оборудования и доступность для изготовления его силами войсковых ремонтных средств.
4. Обеспечение удобства выполнения испытаний и снятия необходимых параметров.
Рассмотрим с учетом предъявленных требований схему испытания электронного усилителя системы стабилизации и схему статической регулировки контактных реле-регуляторов.
Схема проверки электронного усилителя
Входным сигналом электронного усилителя (рис. 297), является выходной сигнал датчика угла. Он представляет собой модулированное по амплитуде переменное напряжение 36 В с несущей частотой 400 Гц. В динамике работы системы входной сигнал изменяется не только по амплитуде, но и по фазе. Изменения эти зависят от рельефа трассы и носят случайный характер. Величина входного сигнала при работе на линейном участке характеристики колеблется в пределах единиц—десятков милливольт. Статическим режимом для усилителя является установившийся сигнал на входе к соответствующий сигнал на выходе.
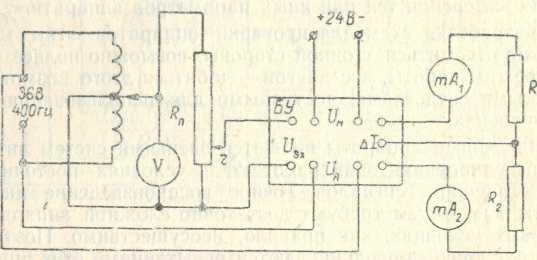
Рис. 297. Схема проверки электронного усилителя
Применение вращающегося трансформатора датчика угла для регулирования входного напряжения усилителя нецелесообразно, так как сигнал порядка 10 мВ соответствует углу поворота ротора относительно статора порядка 0,012°. Осуществлять взаимный поворот ротора и статора с такой точностью — весьма сложная конструктивная задача. Кроме того, вращающиеся трансформаторы имеют нулевой фон, значительно превышающий требуемый сигнал. И, наконец, выходные обмотки ВТ допускают очень малые нагрузки и существует опасность выхода их из строя при наличии короткого замыкания входных цепей электронного усилителя.
Источником входного сигнала в рассматриваемой схеме является автотрансформатор, подключенный к двум фазам преобразователя ПТ-200Ц. Наличие неподвижной средней точки и ползунка позволяет менять как величину, так и фазу выходного напряжения автотрансформатора. Однако перемещение движка автотрансформатора относительно средней точки даже на один виток дает напряжение на его выходе в несколько раз больше необходимого. Поэтому между автотрансформатором и входом усилителя включают делитель напряжения, в качестве которого используют магазин сопротивлении. Ламповый или другой вольтметр, пригодный для измерения переменных напряжений с частотой 400 Гц, в зависимости от пределов измерений может быть подключен либо непосредственно к входу усилителя, либо к выходу автотрансформатора. В этом случае
![]()
где Uвх — напряжение на входе испытуемого электронногоусилителя;
UV — напряжение на выходе автотрансформатора;
Rп и r — соответственно входное и выходное сопротивления делителя напряжения.
Нагрузкой анодных цепей выходных ламп электронных усилителей являются всевозможные обмотки: поляризованного реле, обмотки управления электромагнитного усилителя, обмотки электромагнита гидроусилителя. Поскольку испытания проводятся вне переходных процессов, то в качестве нагрузки можно использовать активные сопротивления соответствующей величины. Выходным сигналом электронных усилителей является разность постоянных токов в анодных цепях выходных ламп. Для ее определения в эти цепи включают миллиамперметры.
Питающими для электронных усилителей являются анодное напряжение и напряжение накала, подаваемые соответственно от двух фаз преобразователя ПТ-200Ц на трансформатор анодного питания и от аккумуляторных батарей, включенных на 24 В.
Основными параметрами электронных усилителей, измеряемыми при ремонте, являются крутизна характеристики и размеры ее линейного участка.
Поскольку
усилитель испытывается вне реальной
системы, то помимо исключения переходных
процессов отсутствует также входной
сигнал, компенсирующий выходную
несимметрию, т. е. несимметрию
характеристик, включенных встречно
выходных ламп электронного усилителя
и их анодных цепей. Поэтому характеристика
усилителя
![]() оказывается
смещенной относительно начала координат.
Чтобы исключить ошибку при определении
ее крутизны, в процессе испытаний
приходится измерять выходную разность
токов дважды, подавая на вход поочередно
два напряжения одинаковой амплитуды
и разной фазы. Тогда крутизна характеристики
при равенстве по абсолютной величине
входных сигналов определится соотношением
оказывается
смещенной относительно начала координат.
Чтобы исключить ошибку при определении
ее крутизны, в процессе испытаний
приходится измерять выходную разность
токов дважды, подавая на вход поочередно
два напряжения одинаковой амплитуды
и разной фазы. Тогда крутизна характеристики
при равенстве по абсолютной величине
входных сигналов определится соотношением
![]()
где К — крутизна характеристики (коэффициент усиления) усилителя;
![]() — разность анодных
токов выходных ламп (выходной сигнал)
при подаче на вход напряжения произвольной
фазы;
— разность анодных
токов выходных ламп (выходной сигнал)
при подаче на вход напряжения произвольной
фазы;
![]() —
выходной сигнал
при подаче на вход напряжения
противоположной
фазы;
—
выходной сигнал
при подаче на вход напряжения
противоположной
фазы;