ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 08.11.2023
Просмотров: 182
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
3.8. Синтез импульсного регулятора, обеспечивающего переходный процесс конечной длительности
Быстродействие импульсной системы определяется максимально приближенным к единице модулем корня характеристического многочлена. Чем меньше максимальный модуль, тем больше степень устойчивости системы. Наконец, если модули всех корней равны нулю, система обладает бесконечно – большой степенью устойчивости. При этом введенное ранее понятие «количество импульсов, за которое переходный процесс входит в 5%-трубку точности» лишается смысла, т.к. такое количество равно нулю. Однако, переходный процесс достигает своего установившегося значения за конечное число импульсов, равное порядку системы.
-
По каналу задания
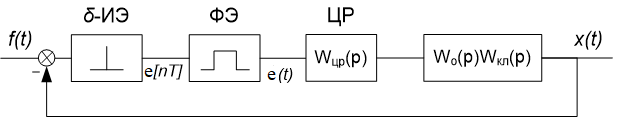
Рисунок 3.13– Структурная схема рассматриваемой системы
Приведенная передаточная функция РИС имеет следующий вид:
 |
Передаточная функция цифрового регулятора, обеспечивающего бесконечно большую степень устойчивости:
 | |
Передаточная функция РИС с цифровым регулятором:
  | |
Передаточная функция ЗИС с бесконечно большой степенью устойчивости:
 |
Выберем

регулятора конечной длительности так, чтобы ЗС получилась астатической (т.е чтобы ее статическая ошибка была нулевой):
 | |
Определим коэффициент
 :
:  |
Передаточная функция ЗИС с бесконечно большой степенью устойчивости:
 | |
| | |
 | |
| | |
 | |
Рассмотрим реакцию системы на единичный скачок

 | |

 |  |
 |  |
 |  |
Построим график переходного процесса по заданию:
Рисунок 3.14 – Переходный процесс конечной длительности ЗИС по заданию
Проверяем результат с помощью теоремы о конечных значениях:
 | |
-
По каналу возмущения
Рассмотрим следующую структурную схему:
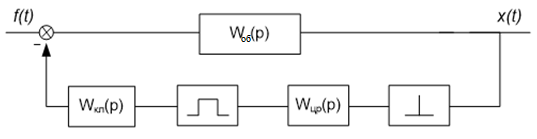
Рисунок 3.15 – Структурная схема системы по каналу возмущения
Преобразуем эту систему к виду:
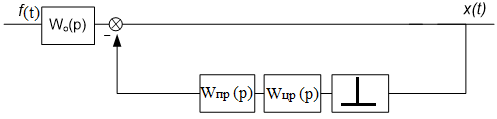
Рисунок 3.16 – Преобразованная снова структурная схема системы по каналу возмущения
Передаточная функция обратной связи совпадает с передаточной функцией разомкнутой системы по каналу задания.
Напишем изображение выходной величины:
 | |
| | |
 | |
| | |
  | |
Величина на выходе системы по каналу возмущения:
  | |
| | |
 | |
| | |
  | |
Преобразуем в пакете Mathcad:
 | |
По теореме о конечных значениях установившееся значение выходного сигнала в системе:
 ,
,что очевидно, поскольку коэффициент усиления регулятора подбирается исходя из условия
Для построения переходного процесса разложим изображение выходной величины на простые дроби и возьмем обратное Z-преобразование:
 | |
| | |
 | |
| | |
 | |
Построим график переходного процесса по возмущению:
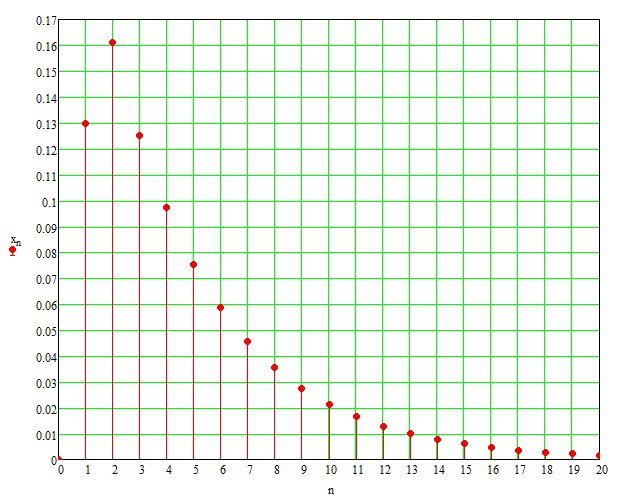
Рисунок 3.17 – Переходный процесс конечной длительности ЗИС по возмущению
Литература
-
Гершкович Ю.Б., Полякова О.А. Методические указания к курсовой работе по дисциплине «Теория автоматического управления». Часть 1. Расчет линейной системы автоматического регулирования с ПИ-регулятором. М.: РГУ нефти и газа (НИУ) имени И.М. Губкина, 2008 – 42 с. -
Ким Д.П. Теория автоматического управления. Т.1. Линейные системы. – М.: Физматлит, 2003. – 288 с. -
Гершкович Ю.Б. Методические указания к курсовой работе по дисциплине «Теория автоматического управления». Часть 2. Расчет нелинейной системы автоматического регулирования с типовыми статическими нелинейностями; Часть 3. Расчет дискретной системы автоматического регулирования с типовыми цифровыми регуляторами. М.: РГУ нефти и газа (НИУ) имени И.М. Губкина, 2009 – 62 с. -
Ким Д.П. Теория автоматического управления. Т.2. Многомерные, нелинейные, оптимальные и адаптивные системы: Учеб. Пособие. – М.: Физматлит, 2004. – 464 с.