ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 08.11.2023
Просмотров: 184
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Статическая характеристика клапана (Q2 = f(Pрег))
Табл.1.2.1
| Ррег (атм) | 0 | 0.15 | 0.25 | 0.35 | 0.5 | 0.6 | 0.7 | 0.8 | 1.0 |
| Q2 (м3/сек) | 0 | 0 | 0.02 | 0.09 | 0.3 | 0.65 | 0.75 | 0.8 | 0.8 |
Динамическая характеристика клапана (Q2 = f(t))
Табл.1.2.2
| t (сек) | 0 | 0.7 | 1.2 | 1.8 | 2.5 | 3.0 | 3.5 | ∞ |
| Q2 (м3/сек) | 0.1 | 0.3 | 0.4 | 0.46 | 0.5 | 0.56 | 0.58 | 0.6 |
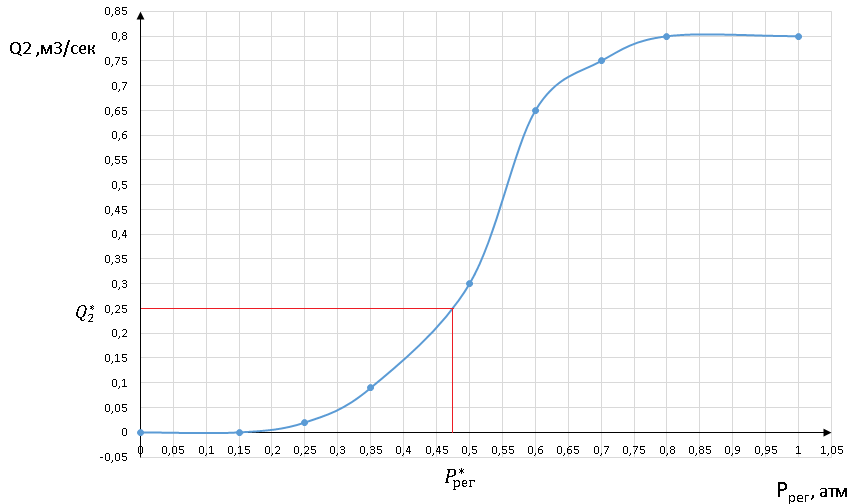
Рисунок 1.3 – Статическая характеристика клапана
Согласно графику, номинальному значению Q2 соответствует номинальное значение давления равное 0.462 атм.
Определим коэффициент усиления клапана:

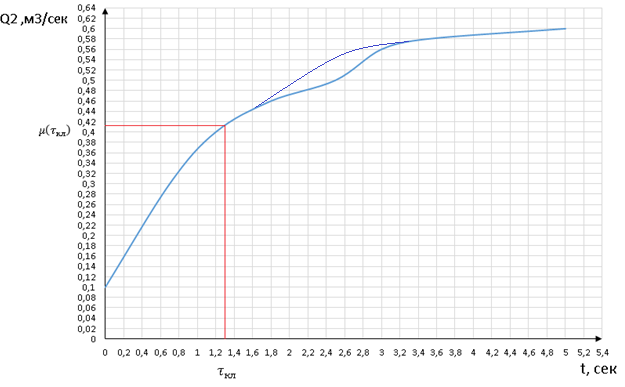
Рисунок 1.4 – Динамическая характеристика клапана
Динамическую характеристику клапана можно описать экспоненциальной функцией:
 | |
Определим постоянную времени клапана. При t = τкл функция степени открытия клапана равна μ(τкл):
 | |
 | |
По графику определяем постоянную времени клапана t
кл: tкл=1.31 сек
Полученная функция:

Убедимся, что найденная функция верная, подставив значения времени и сравнив их со значением расхода Q2 из таблицы 1.2.2:
| Рассчитанное | 0.1 | 0.306 | 0.399 | 0.473 | 0.525 | 0.549 | 0.565 | 0.599 |
| По условию | 0.1 | 0.3 | 0.4 | 0.46 | 0.5 | 0.56 | 0.58 | 0.6 |
Значения практически равны, следовательно, постоянная времени tкл найдена верно.
Передаточная функция клапана выглядит следующим образом:
 | |
 | |
1.3 Составление замкнутой структуры с двумя входами
Передаточная функция регулятора имеет вид:
 | |
где kп – коэффициент усиления пропорционального регулятора (П-регулятора);
τи – постоянная времени интегрирующего звена (И-регулятора).
Рисунок 1.5 – Структурная схема замкнутой системы
Прямое преобразование Лапласа сигнала выхода имеет вид:
 | |
 | |
| | |
1.4 Вывод передаточных функций по заданию и возмущению
Передаточная функция замкнутой системы по заданию:
 |
 |
Передаточная функция замкнутой системы по возмущению:
 | |
 | |
1.5 Исследование статики замкнутой системы
Идеальная система должна иметь
 а
а  . Тогда система не будет реагировать на возмущение и будет в точности отслеживать сигнал задания.
. Тогда система не будет реагировать на возмущение и будет в точности отслеживать сигнал задания. 


 =1
=1Требования статики выполнены:


Вывод: система астатическая.
1.6 Расчет динамики
Настройка изодромного регулятора по критерию максимальной степени устойчивости, построение двух корневых годографов (по коэффициенту усиления и постоянной времени регулятора), определение быстродействия и показателя колебательности, сравнение косвенных и прямых показателей качества (непосредственно по графику переходного процесса).
Схема по входу задания

Рисунок 1.6 – Структурная схема по входу задания

 Схема по входу возмущения
Схема по входу возмущенияРисунок 1.7 – Структурная схема по входу возмущения

Характеристический многочлен:

Чтобы наша система 3-го порядка имела максимальную возможную степень устойчивости, необходимо, чтобы все корни лежали на одном расстоянии от мнимой оси.
Необходимый критерий устойчивости выполнен (все коэффициенты положительные).




Пусть β = 0.5;
Тогда kп = 1.954; τи = 4.169 с
Тогда корни характеристического уравнения равны:

Время регулирования:
Построим корневые годографы, чтобы проанализировать движение корней характеристического уравнения замкнутой системы, которое влияет на изменение свойств системы при изменении настроечных параметров.
-
По коэффициенту усиления kп (при ранее найденном τи = 4.169 с)
Запишем передаточную функцию разомкнутой системы:


Полюса:

Нули:

n = 3; m = 1; n–m = 2
Найдём центр звезды асимптот

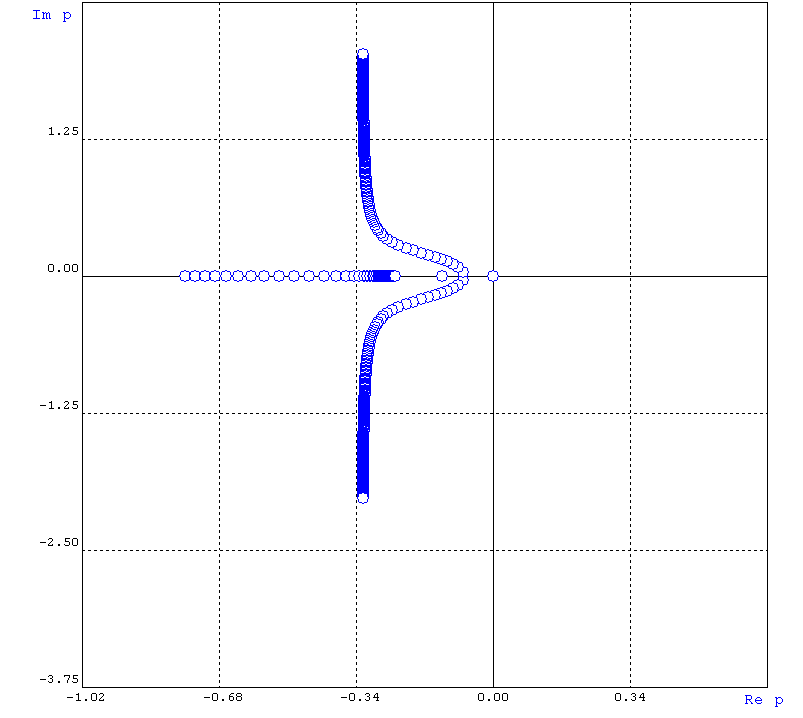
Рисунок 1.8 – Годограф по коэффициенту усиления
По критерию Раута-Гурвица:




Коэффициент усиления не может быть отрицательным, поэтому kп > 0. Система устойчива при
 .
.-
По постоянной времени τи (к примеру, kп = 1.954)
Запишем передаточную функцию разомкнутой системы:



Построим корневой годограф по 1/ τи
Полюса:

n = 3; m = 0; n–m = 3
Найдём центр звезды асимптот

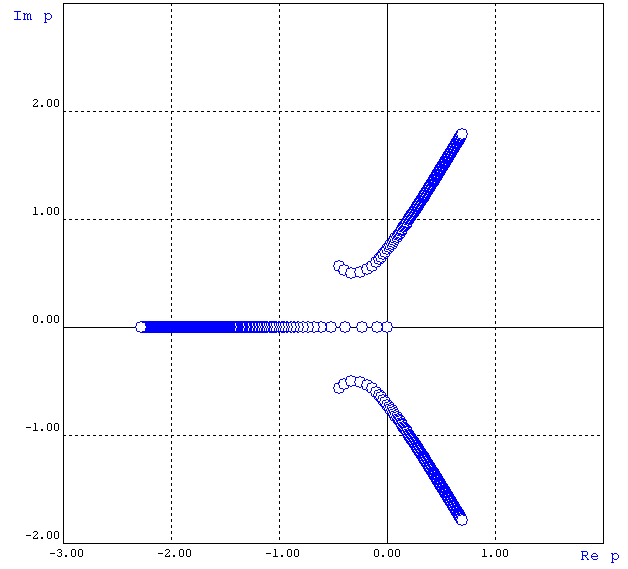
Рисунок 1.9 – Корневой годограф по 1/ τи
По критерию Раута-Гурвица:




Система устойчива при τи > 0.913, т.е. для рассчитанного ранее τи=4.169 система является устойчивой,
 .
.Построение переходного процесса нескорректированной системы по входам задания и возмущения и сравнение прямого и косвенного времени регулирования.


Рисунок 1.10 – Переходный процесс нескорректированной системы по входу задания
Время регулирования: по графику: tр прямое = 9.53 с
вычисленное: tр косвенное =
 с.
с.Колебательность процесса:
Степень колебательности:
Перерегулирование:


Рисунок 1.11 – Переходный процесс нескорректированной системы по входу возмущения
Переходный процесс по возмущению выходит из 5-% трубки точности.
Построение амплитудно-частотной характеристики системы и определение показателя колебательности М.