ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 08.11.2023
Просмотров: 145
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
2.2 Решение системы дифференциальных уравнений
4. РАЗРАБОТКА СИСТЕМЫ ДЛЯ ПИТАНИЯ ВЕНТИЛЬНЫХ ДВИГАТЕЛЕЙ
4.1 Обоснование, выбор и описание функциональной схемы электропривода
4.2 Описание и построение структурной схемы электропривода
4.3 Разработка и описание принципиальной электросхемы датчика контроля состояния вентилей
4.4 Разработка и описание принципиальной электросхемы системы импульсно-фазового управления
4.5 Расчет и выбор элементов датчика контроля состояния вентилей
4.6 Расчет и выбор элементов системы импульсно-фазового управления
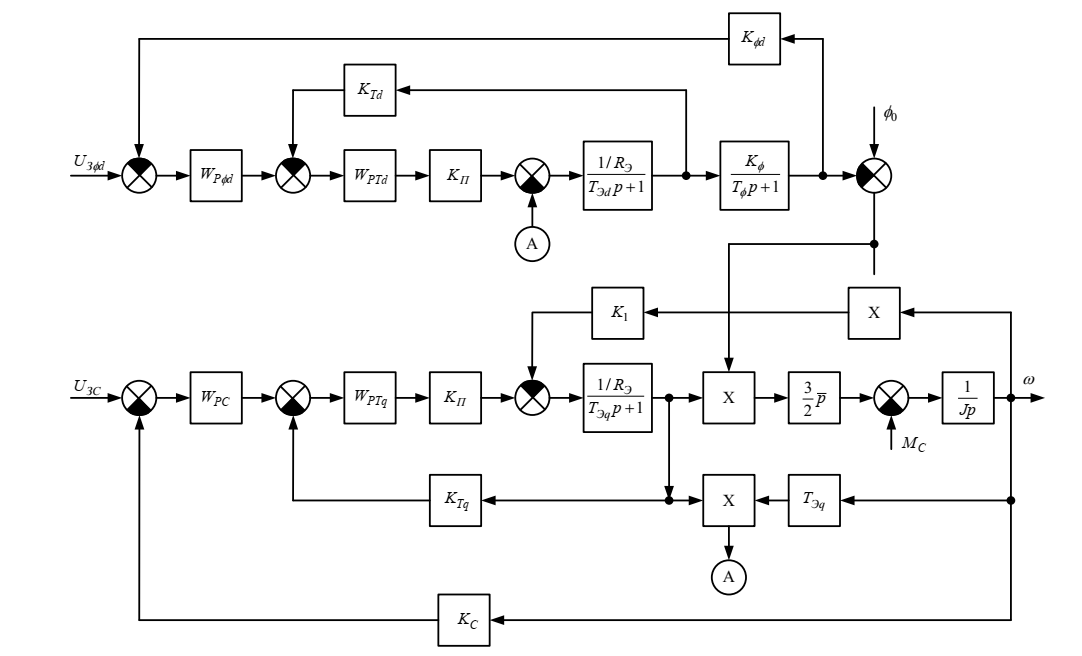
Рисунок 2.15 – Структурная схема системы управления ВИД в осях d-q
В процессе исследований анализировались координаты ВИД при пуске
с различными значениями угла θ . На основании этого построена угловая
характеристика вентильного двигателя, изображенная на рис. 2.16.
По направлениям значений угла θ в масштабе отложены
соответствующие значения координат ВИД, которые затем соединены в
годограф. Положительные значения координаты обозначены
непрерывистой линией, отрицательные – пунктирной.
Анализ угловой диаграммы (рис. 2.16) показывает, что:
- годографы координат Id, Iq, M представляют собой окружности;
- годоргафы Id и Iq сдвинуты друг относительно друга на 90 градусов;
- годограф n состоит из двух эллипсов, экстремумы для +n и –n не
совпадают, но симметричны относительно θ =0°;
- годографы Iq и M лежат на одной оси и масштабно совпадают;
- максимальная скорость при пуске соответствует θ =±α, где α – угол,
зависящий от конструктивных параметров ВИД.
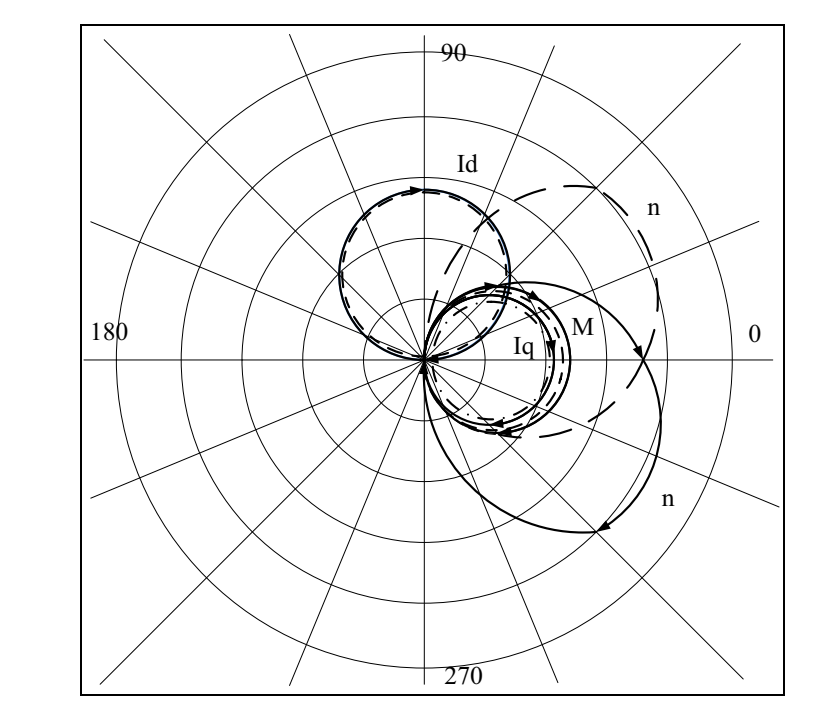
Рисунок 2.16 – Угловая диаграмма ВИД
Аналогично можно построить угловую диаграмму ВИД при скачке нагрузки ΔMH (рис. 2.17).
Анализ угловой диаграммы (рис. 2.17) показывает, что:
- время регулирования tрег. и статическая ошибка Δn существенно зависят от угла установки θ ;
- минимальные значения этих параметров соответствуют значению θ ≈90°.
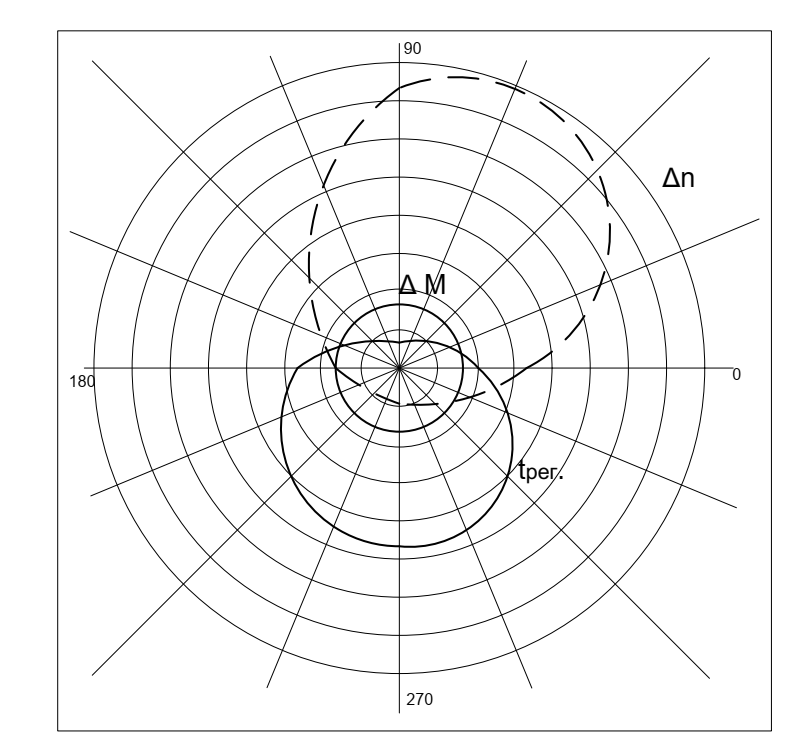
Рисунок 2.17 – Угловая диаграмма параметров ВИД при скачке нагрузки
Система управления содержит контуры регулирования тока
I q , скорости ω , тока Id , потокосцеплений ψ d и ψ q. Расчеты регуляторов
этих контуров можно выполнить по известным методикам синтеза систем
подчиненного регулирования.
В режиме рекуперативного торможения уменьшается скважность
импульсов на транзисторах мостовых инверторов силовых цепей.
Накопленная кинетическая энергия движения создает в обмотках ВИД эдс,
которая через мосты обратных диодов прикладывается к автономному
источнику электроэнергии (аккумулятору) и происходит возврат энергии.
Величина возвращаемой энергии зависит от тока в этом режиме.
Его значение в свою очередь связано с жесткостью характеристики ВИД на
этом этапе работы. Традиционная тяговая характеристика имеет высокую
жесткость при больших моментах нагрузки и малую при низких. Если в
процессе торможения увеличить жесткость характеристики ВИД, то
возрастет ток и возвращаемая энергия. Изменение характеристики ВИД
можно осуществить за счет электронного управления углом установки θ .
Полученные результаты позволяют сделать следующие выводы:
- управление ВИД по углу установки ДПР является эффективным и
позволяет оптимизировать режимы работы двигателя;
- в случае создания реверсивного быстродействующего
электропривода наиболее приемлемой является нейтральная установка;
- полученные выражения справедливы для аналоговых ДПР
различных типов (вращающийся трансформатор, датчик Холла с
линейной характеристикой и т.д.);
- управление по углу установки имеет более высокое быстродействие,
чем по напряжению.
3 ПРЕОБРАЗОВАТЕЛИ ДЛЯ ПИТАНИЯ ВЕНТИЛЬНЫХ ДВИГАТЕЛЕЙ
Вентильно-индукторный двигатель находит все более широкое применение в опытном и серийном производстве благодаря повышенной надежности, простоте конструкции и технологичности. ВИД
превосходит асинхронный электропривод по трудоемкости изготовления
в 1,5–2,0 раза; имеет более высокое значение КПД (на 2–6 %), что было подтверждено во 2 главе.
Если в конструкции ротора нет постоянного магнита, то силовые фазные обмотки ВИД приводятся в действие однополярными импульсами, что делает их более дешевыми и надежными преобразователями, чем машинные инверторы переменного тока. Однако существуют некоторые специализированные области, где к приводу, особенно к инвертору, предъявляются повышенные требования. Эти требования увеличивают сложность схемы преобразователя и, соответственно, общую стоимость привода.
Для питания ВИД каждый инвертор должен обеспечивать следующие три этапа.
Цикл переключения обмотки двигателя На первом этапе на обмотку подается максимальное напряжение для быстрого увеличения магнитного потока. На втором этапе напряжение питания регулируется для поддержания магнитного потока (тока) на определенном уровне. На третьем этапе обмотка отключается, чтобы быстро рассеять магнитное поле для предотвращения тормозного момента.
В настоящее время разработан и применяется ряд преобразователей для выпрямления обмоток ВИД. Существуют различные решения.
Силовые цепи с обмотками ВИД можно объяснить двумя факторами:
1) Стремлением улучшить электромагнитный процесс для получения требуемых электромеханических свойств;
2) минимизация стоимости компонентов схемы (особенно транзисторов, диодов и конденсаторов).
Силовые преобразователи можно разделить на различные типы.
Среди них можно выделить четыре основные группы.
Первая группа - это «классическая» полумостовая схема и ее модификации (рис. 3.1а).
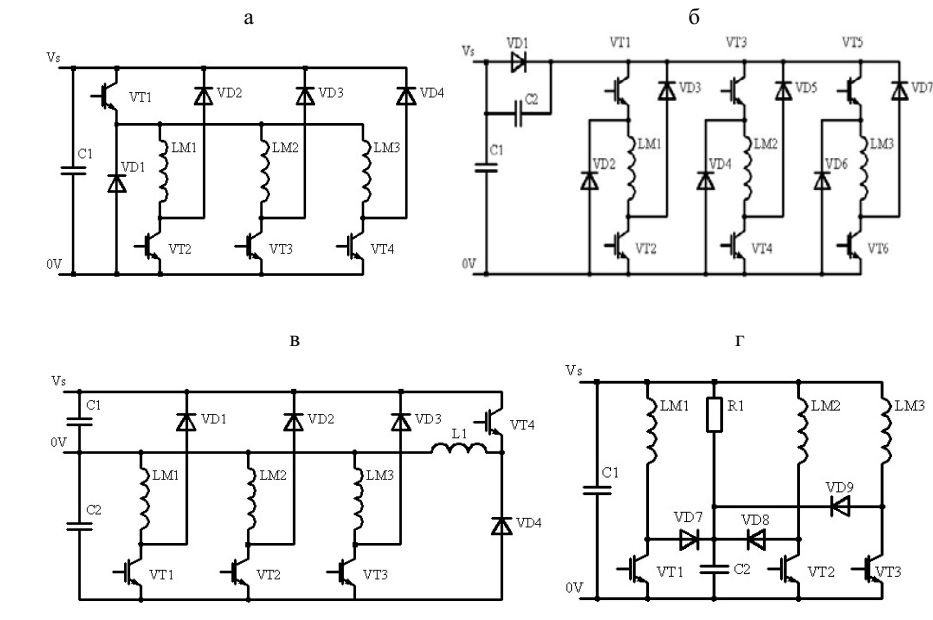
Рисунок 3.1 − Схемы питания обмоток вентильно-индукторного двигателя
Классическая схема представляет собой полумостовой преобразователь, состоящий из двух перекрестно соединенных транзисторов и двух диодов. В этой схеме, когда управляющий импульс подается на оба транзистора, на обмотки подается полное напряжение питания (режим P1), величина тока и, следовательно, магнитного потока увеличивается. Когда управляющий импульс подается на один транзистор, обмотка замыкается через переключатель и обратный диод (режим P2).
Чередование режимов Р1 и Р2 при работе в фазе 1 является фазой, обеспечивающей поддержание магнитного потока магнита на заранее заданном уровне и на относительно низкой частоте.
При отсутствии управляющего импульса на транзистор, на обмотку через обратный диод подается отрицательное напряжение.
Однако если в обмотке течет ток, магнитное поле быстро рассеивается.
В модификациях классической схемы один из ключей подключает две
и более фаз, что уменьшает общее количество силовых транзисторов
в преобразователе. Регулирование напряжения на обмотках производится
за счет управления транзистором соответствующей обмотки. Так как
в схеме питания имеется общий ключ на несколько фаз, то в некоторых
конфигурациях ВИД, например 6/4, режим Р2 не выполняется. Применение
таких схем целесообразно в ВИД с числом фаз m ≥ 4.
Ко второй группе относятся преобразователи с накоплением энергии. В данную группу входят преобразователи с магнитным и емкостным накоплением энергии (рис. 3.1б). В первом случае энергия поля обмотки фазы при отключении ее от источника в виде магнитного поля другой катушки магнитосвязанной с первой.
Для этих целей в конструкции ВИД предусматривают наличие бифилярных или аксиальных обмоток. Наличие дополнительных обмоток приводит к усложнению конструкции двигателя и увеличению его стоимости. Поэтому такие электромеханические преобразователи не нашли широкого применения.
В преобразователях второй подгруппы энергия магнитного поля отключаемой обмотки накапливается в виде электрической энергии в дополнительных конденсаторах и используется в дальнейшем для быстрого увеличения тока включаемой обмотки. Это позволяет значительно улучшить
электромагнитные переходные процессы, протекающие в ВИД. Отдача
магнитной энергии в конденсаторы приводит к значительному повышению
напряжения, что требует применения полупроводниковых приборов более
высокого класса по напряжению. Различают схемы с параллельным и последовательным включением конденсаторов.
К третьей группе относятся преобразователи с дополнительным звеном
постоянного тока, в качестве которого используются повышающие преобразователи напряжения (рис. 3.1в). Такие преобразователи позволяют регулировать величину напряжения в звене постоянного тока и обеспечивать оптимальные электромагнитные переходные процессы во всем диапазоне регулирования скорости ВИП при изменяющихся нагрузках на валу двигателя.
Такие преобразователи находят применение в высокоскоростном электроприводе.
К четвертой группе относятся преобразователи, в которых энергия магнитного поля отключаемой фазы не возвращается в источник, а рассеивается в виде теплоты на гасящем сопротивлении и/или обмотке (рис. 3.1г).
Эти схемы являются самыми простыми и дешевыми. Но вместе с этим они обладают и самым низким значением КПД.
Применение гасящего сопротивления приводит к тому, что ток отключаемой фазы не спадает до нуля. Это приводит к наличию небольшого
тормозного момента, который уменьшает общий момент двигателя. При
этом, чем меньше величина сопротивления реостата, тем больший ток протекает по обмотке.
Выбор конкретного типа преобразователя для питания ВИД производится в результате комплексного подхода в зависимости от параметров двигателя (число фаз, номинальная скорость и мощность) и условий эксплуатации электропривода.
Рассмотрим типы электроприводов для вентильно-индукторного двигателя:
1. Реверсивный электропривод ВИД с обратной связью по
скорости
Рассматриваемый электропривод содержит синхронную машину (СМ) и синусно-косинусный датчик положения ротора (СКР).
Обмотка статора СМ подключена к выходу двухканального инвертирующего усилителя, вход которого подключен к коммутируемому выходу. Работа коммутатора управляется сигналом ДПР. Вход коммутатора двигателя затвора подключен к ДПР.
Сигнал ошибки скорости, генерируемый регулятором скорости. Регулятор скорости формирует сигнал ошибки скорости из сигнала задания скорости и сигнала обратной связи по скорости (ОСС).
Применение электрического дифференцирования сигнала от ДПР - сигнал умножается на сигнал от дифференциатора. Берется сумма сигналов ДПР и произведения.
Функциональная схема реверсивного электропривода ВИД показана на рисунке 3.2.
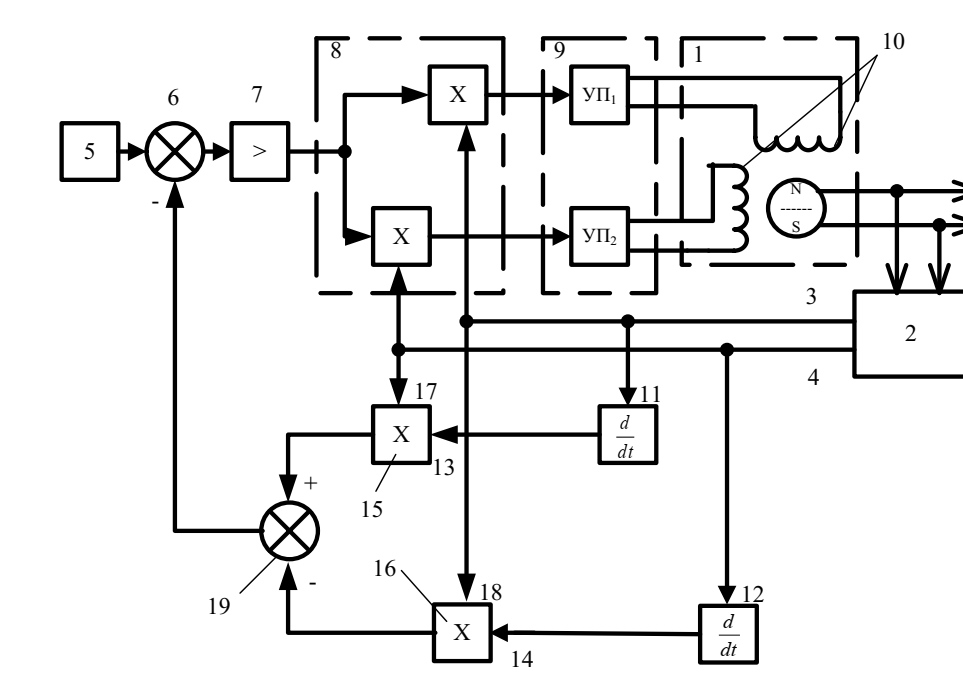
Рисунок 3.2 − Функциональная схема реверсивного ВИД
Где 1 − синхронизатор, 2 − синус-косинус ДПР, 3 и 4 − выход ДПФ, 5 − формирователь сигнала, 6 − элемент сравнения; 7 − предварительный усилитель; 8 − коммутатор; 9 – двухканальный усилитель; 10 − механическая обмотка статора; 11 и 12 − дифференциалы; 13, 14, 17 и 18 − вход умножителя; 15 и 16 − умножитель; 19 – сумматор.
Сигналы с ДПР будут изменяться в соответствии с выражениями:
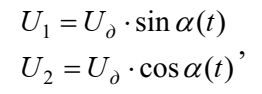
где Uд– амплитуда сигнала ДПР.
Сигнал поступающий с задатчика сигнала, сравнивается с
напряжением обратной связи Uocc , на выходе которого получается сигнал
ошибки.
Скоростная обратная связь имеет линейную характеристику, высокую
надежность и не имеет каких-либо ограничений по быстродействию и
скорости.
2. Вентильный электропривод с обратной связью по моменту
Структурная схема предлагаемого электропривода показана на рисунке 3.3, где 1 − синхронная машина, 2 − обмотка статора двигателя, 3 − преобразователь фазного тока, 4 − усилитель, 5 − фазочувствительный выпрямитель, 6 − синусоидальный выпрямитель, 7 − обмотка возбуждения датчика, 8 − модулятор, 9 − тюнер, 10 − блок сравнения, 11 − контроллер усилителя, 12 − блок изменения сигнала, 13 − вычислитель момента, 14 − блок идентификации момента.
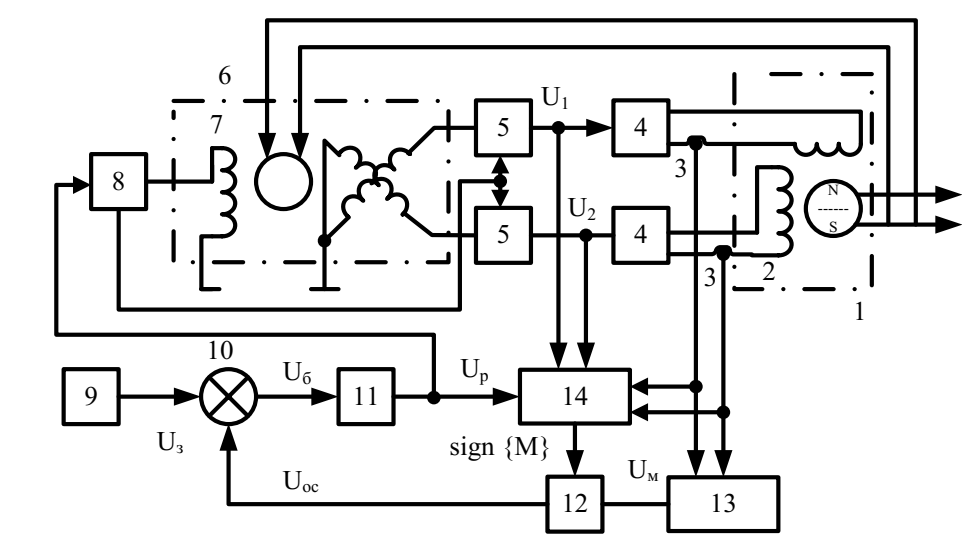
Рисунок 3.3 − Структурная схема вентильного электропривода
с обратной связью по моменту
Вычислитель момента(рис.3.3а) содержит два квадратора 15, блок извлечения квадратного корня 16 и сумматор 17. Блок определения знака момента содержит два логических блока сравнения 18, 19, компараторы 20-24, входы которых образуют соответствующие входы блока 14, логический элемент 2И-НЕ 25, логический элемент 2НЕ-И-НЕ 26 и RS-триггер 27. Каждый из логических блоков сравнения 18, 19 содержит элементы 3И-НЕ 28-30, элементы И-НЕ 31-34 и элемент 4И-НЕ 35.