Файл: Пояснительная записка к дипломному проекту дп 23. 05. 03. 04. 153. Пз студент гр. 153 Д. Ю. Дроголов Консультант по безопасности жизнедеятельности.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 06.12.2023
Просмотров: 302
Скачиваний: 2
СОДЕРЖАНИЕ
1 АНАЛИЗ КОНСТРУКЦИЙ ПРОТИВОБОКСОВОЧНЫХ СИСТЕМ
1.1 Релейные противобоксовочные системы
1.2 Электронные противобоксовочные системы
1.3 Системы регулировки проскальзывания колёсных пар
1.4 Другие противобоксовочные системы
2 АНАЛИЗ СИЛОВОЙ СХЕМЫ ЭЛЕКТРОВОЗА 2ЭС5К
2.1 Электрические цепи первичной обмотки тягового трансформатора
2.2 Электрические цепи вторичной обмотки трансформатора и тягового электродвигателя в режиме тяги
3 АНАЛИЗ ПРОТИВОБОКСОВОЧНОЙ СХЕМЫ С УРАВНИТЕЛЯМИ
3.1 Принцип работы противобоксовочной схемы
3.2 Модернизация схемы на новые элементы
4 ПРОЕКТ МОДЕРНИЗАЦИИ ЭЛЕКТРОВОЗА 2ЭС5К
4.1 Изначальная компоновка оборудования в секции
4.2 Модернизированная компоновка оборудования в секции
4.3 Монтаж электрических цепей
5 ОБЕСПЕЧЕНИЕ БЕЗОПАСНОСТИ ТРУДА ПРИ ЭКСПЛУАТАЦИИ И ОБСЛУЖИВАНИИ ЭЛЕКТРОВОЗА
5.1 Общие требования безопасности
5.2 Меры безопасности при входе в высоковольтную камеру
5.3 Меры безопасности при поднятии токоприёмника
5.4 Меры безопасности при поднятом токоприёмнике
5.5 Меры безопасности при питании электровоза от сети депо
5.6 Меры безопасности при устранении неисправностей в пути следования
5.7 Меры безопасности при ремонте электровоза
6 ЭКОНОМИЧЕСКОЕ ОБОСНОВАНИЕ МОДЕРНИЗАЦИИ
6.1 Общая характеристика показателей оценки экономической эффективности технических решений
6.2 Определение затрат на внедрение и реализацию противобоксовочной системы
6.3 Определение экономического эффекта
6.4 Определение показателей экономической эффективности
6.5 Итоговые положения о целесообразности модернизации электровозов 2(3)ЭС5К «Ермак»
Трогание с места электровоза зачастую сопровождается разгрузкой первых по ходу движения осей колёсных пар каждой из тележек. Это зачастую приводит к возникновению боксования со всеми вытекающими из этого последствиями. Однако другие режимы движения тоже могут привести к возникновению боксования колёсных пар ТЭД, питаемых от разных ВИП. Поэтому исследование этого вида боксования является актуальным.
Зададимся условием, что в боксования срываются колёсные пары первого и третьего ТЭД.
На рисунке 3.16 отображены величины разности потенциалов между средними точками ТЭД. График токов якорей ТЭД аналогичен предыдущему виду боксования (рисунок 3.13) за исключением лишь того, что в момент начала боксование снижение тока якоря произойдёт у двигателя, питаемого от другого ВИП. Поэтому данный график не приводится. График перетекания уравнительных токов представлен на рисунке 3.17.



г)
в)
б)
а)
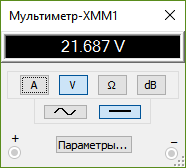
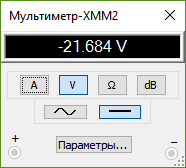
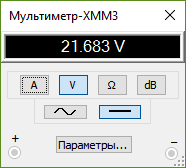
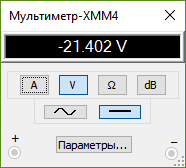
Рисунок 3.16 – Величина напряжений между средними точками ТЭД в режиме боксования:
а – между 1 и 2 ТЭД; б – между 2 и 3 ТЭД; в – между 3 и 4 ТЭД; г – между 4 и 1 ТЭД
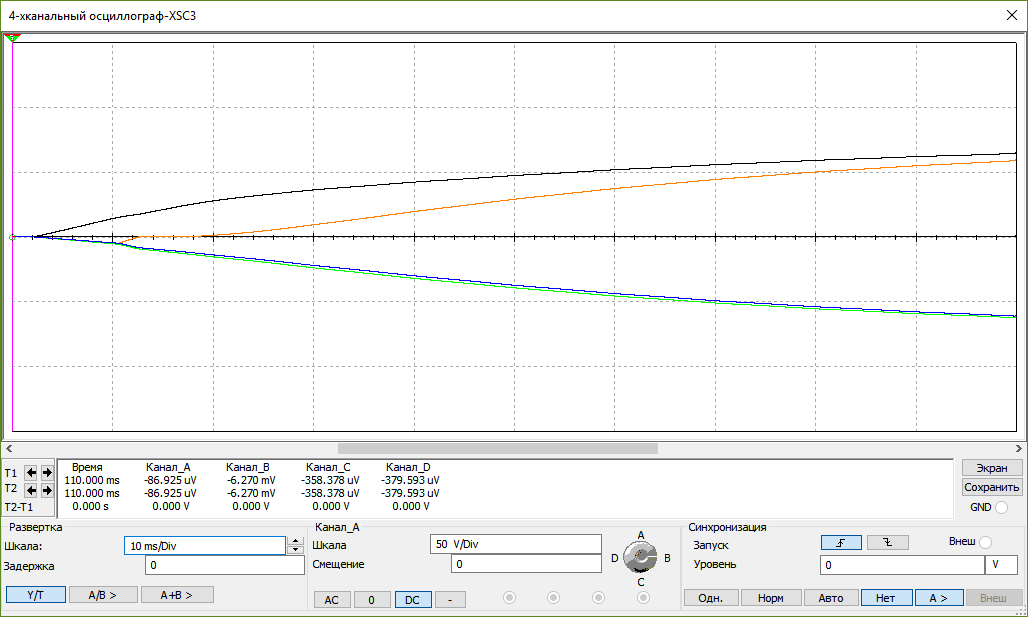
Рисунок 3.17 – Осциллограмма уравнительных токов:
верхний график – токи подпитки первого ТЭД боксующей КП; средний график – ток
подпитки третьего ТЭД боксующей КП; нижний график – уравнительные токи от второго и четвёртого ТЭД небоксующих КП
Данный вид боксования очень схож с предыдущим по возникающим процессам в силовой схеме и при условии одновременного начала боксования КП повторяет рисунок 3.14. Поэтому было смоделировано последовательное вступление колёсных пар в процесс боксования, сначала первая КП, а затем третья и данный вариант перетекания токов был зафиксирован на рисунке 3.17.
3.3.7 Моделирование боксования при разности диаметров бандажей КП
Согласно [20] электровозы «Ермак» имеют номинальный диаметр КП по кругу катания 1250 мм. Однако тем же документом устанавливается, что допустимо устанавливать КП с диаметром, не менее 1205 мм, причём у комплекта колёсных пар, подкатываемых под электровоз, разница диаметров бандажей не должна превышать 8 мм.
Произведём моделирование наихудших условий. Для этого примем диаметр бандажа Dб одной КП 1205 мм, а другой – 1213 мм. При этом в подсхемах Vn1–Vn4 изменятся коэффициенты. Для случая Dб = 1205 мм вид подсхемы представлен на рисунке 3.18, для случая Dб = 1213 мм – на рисунке 3.19.

Рисунок 3.18 – Вид подсхем Vn1 и Vn3 для случая разностных диаметров колёсных пар

Рисунок 3.19 – Вид подсхем Vn2 и Vn4 для случая разностных диаметров колёсных пар
В ситуации, когда боксование отсутствует, величины разности потенциалов между средними точками ТЭД отображены на рисунке 3.20.
г)
в)
б)
а)
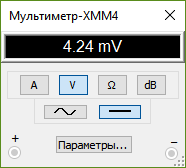
Рисунок 3.20 – Величина напряжений между средними точками ТЭД в статическом режиме:
а – между 1 и 2 ТЭД; б – между 2 и 3 ТЭД; в – между 3 и 4 ТЭД; г – между 4 и 1 ТЭД
По значениям разности потенциалов можно удостовериться, что неравенство бандажей КП повышает величину разности относительно ситуации, в которой все бандажи колёсных пар равны Dб = 1250 мм (рисунок 3.8). Однако это повышение не так существенно и восприниматься, как боксование, не будет.
В момент начала боксования датчики напряжения покажут значения, представленные на рисунке 3.21, из которых можно сделать вывод о том, что разность диаметров бандажей КП несколько повышает величину разности потенциалов.
г)
в)
б)
а)
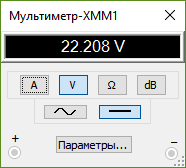
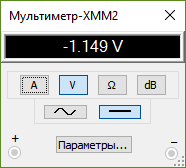
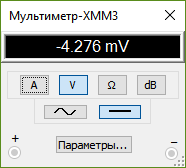
Рисунок 3.21 – Величина напряжений между средними точками ТЭД в режиме боксования:
а – между 1 и 2 ТЭД; б – между 2 и 3 ТЭД; в – между 3 и 4 ТЭД; г – между 4 и 1 ТЭД
Диаграмма начала боксования представлена на рисунке 3.22.
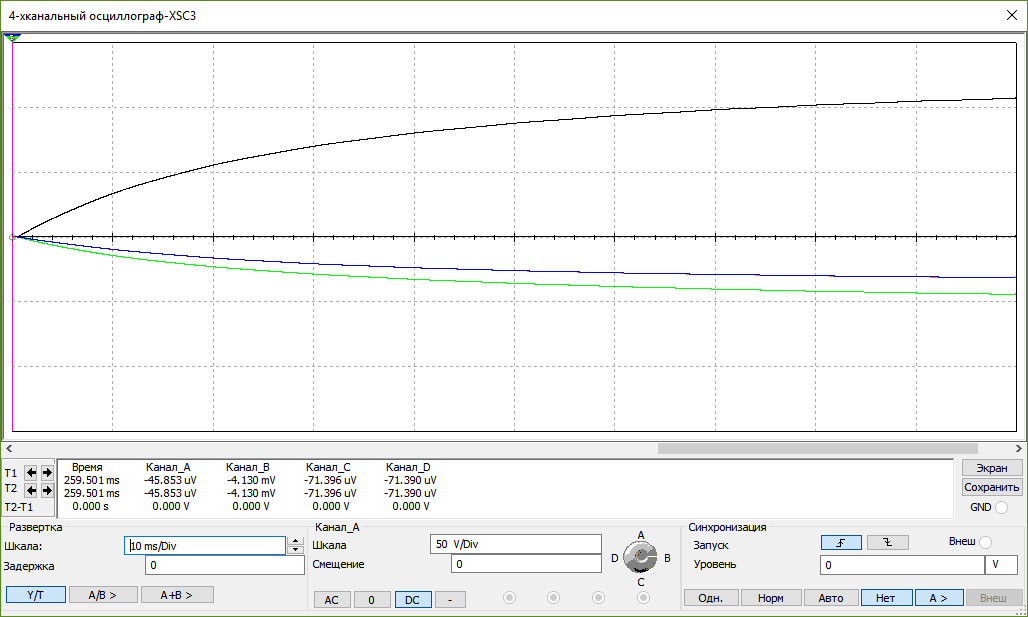
Рисунок 3.22 – Осциллограмма уравнительных токов при боксовании
Из последнего представленного рисунка можно убедиться в том, что разница диаметров бандажей КП повышает величину уравнительного тока, подпитывающего обмотку возбуждения боксующего ТЭД.
3.3.8 Выводы по результатам моделирования
Упрощённое моделирование работы электровоза позволило подтвердить некоторые положения и прийти к следующим выводам:
- в статическом режиме между средними точками ТЭД действительно существует разница потенциалов, а при разности диаметров бандажей КП она увеличивается;
- при боксовании КП одного ТЭД подпитка его обмотки возбуждения уравнительным током осуществляется в своём преимущественном большинстве соседствующим с ним по ВИП двигателем;
- боксование КП двух ТЭД в равной степени перераспределяет уравнительные токи между ТЭД боксующих КП и подпитывающих ТЭД;
- за счёт датчиков напряжения можно распознавать виды боксования, что важно не только в целях дополнительной информативности, но и для наилучшего предотвращения возникшего боксования.
Срабатывания датчиков напряжения для каждого из режимов боксования сведены в таблицу 3.1.
Таблица 3.1 – Соответствие сигналов датчиков напряжения ДН1–ДН4 режимам возникшего боксования
| Вид боксования | ДН1 | ДН2 | ДН3 | ДН4 |
| Боксование КП 1 ТЭД | +V | – | – | -V |
| Боксование КП 2 ТЭД | -V | +V | – | – |
| Боксование КП 3 ТЭД | – | -V | +V | – |
| Боксование КП 4 ТЭД | – | – | -V | +V |
| Боксование КП 1 и 2 ТЭД | – | +V | – | -V |
| Боксование КП 2 и 3 ТЭД | -V | – | +V | – |
| Боксование КП 3 и 4 ТЭД | – | -V | – | +V |
| Боксование КП 4 и 1 ТЭД | +V | – | -V | – |
Окончание таблицы 3.2
| Вид боксования | ДН1 | ДН2 | ДН3 | ДН4 |
| Боксование КП 1 и 3 ТЭД | +V | -V | +V | -V |
| Боксование КП 2 и 4 ТЭД | -V | +V | -V | +V |
| Боксование КП 1, 2 и 3 ТЭД | – | – | +V | -V |
| Боксование КП 2, 3 и 4 ТЭД | -V | – | – | +V |
| Боксование КП 3, 4 и 1 ТЭД | +V | -V | – | – |
| Боксование КП 4, 1 и 2 ТЭД | – | +V | -V | – |
Распознавание начавшегося боксования и его вида позволит автоматике принять соответствующие меры для его подавления.
3.4 Управление системой ЭСО
Система управления ЭСО представлена на рисунке 3.23.
Рисунок 3.23 – Принципиальная схема системы управления ЭСО
Данная система управления подаёт импульсы на драйвер IGBT-модуля Uвых в моменты боксования и снимает его по моменту восстановления работы
электровоза в статическом режиме (без боксования). Элементы, используемые в схеме на рисунке 3.23, сведены в таблицу 3.2.
Таблица 3.2 – Соответствие обозначений на схеме системы управления ЭСО
элементной базе
| Обозначение | Марка | Номинал |
| А1 | К140УД7 | – |
| V1 | Д818Е | – |
| V2 | КД509А | – |
| V3 | КТ630 | – |
| V4 | КТ818В | – |
| V5 | КД210В | – |
| С1 | К-73-16 | 2,2 мкФ, 160 В |
| R1, R2 | МПТ-0,5 | 4,7 кОм |
| R3 | МПТ-0,5 | 240 кОм |
| R4 | МПТ-0,5 | 300 кОм |
| R5 | МПТ-0,5 | 470 кОм |
| R6 | МПТ-0,5 | 300 Ом |
| R7 | МПТ-0,5 | 1 кОм |
| R8 | МПТ-0,5 | 4,3 кОм |
| R9 | МПТ-0,5 | 180 Ом |
| R10 | МПТ-2 | 51 Ом |
| R11 | ПЭВ-25 | 10 Ом |
Схема узла автоматической подсыпки песка представлена на рисунке 3.24, а её компоненты – в таблице 3.3.
Таблица 3.3 – Соответствие обозначений на схеме системы автоматической
подсыпки песка элементной базе
| Обозначение | Марка | Номинал |
| А1, А2 | К140УД7 | – |
| V1, V2, V5–V7 | КД209А | – |
| V3 | Д818Е | – |
| V4 | КТ630 | – |
| С1 | К-50-29 | 100 мкФ, 100 В |
| С2 | К-73-16 | 2,2 мкФ, 160 В |
| К | РКС-3 | – |
| R1, R2 | МПТ-0,5 | 1 кОм |
| R3 | МПТ-0,5 | 1,8 кОм |