Файл: Пояснительная записка к дипломному проекту дп 23. 05. 03. 04. 153. Пз студент гр. 153 Д. Ю. Дроголов Консультант по безопасности жизнедеятельности.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 06.12.2023
Просмотров: 293
Скачиваний: 2
СОДЕРЖАНИЕ
1 АНАЛИЗ КОНСТРУКЦИЙ ПРОТИВОБОКСОВОЧНЫХ СИСТЕМ
1.1 Релейные противобоксовочные системы
1.2 Электронные противобоксовочные системы
1.3 Системы регулировки проскальзывания колёсных пар
1.4 Другие противобоксовочные системы
2 АНАЛИЗ СИЛОВОЙ СХЕМЫ ЭЛЕКТРОВОЗА 2ЭС5К
2.1 Электрические цепи первичной обмотки тягового трансформатора
2.2 Электрические цепи вторичной обмотки трансформатора и тягового электродвигателя в режиме тяги
3 АНАЛИЗ ПРОТИВОБОКСОВОЧНОЙ СХЕМЫ С УРАВНИТЕЛЯМИ
3.1 Принцип работы противобоксовочной схемы
3.2 Модернизация схемы на новые элементы
4 ПРОЕКТ МОДЕРНИЗАЦИИ ЭЛЕКТРОВОЗА 2ЭС5К
4.1 Изначальная компоновка оборудования в секции
4.2 Модернизированная компоновка оборудования в секции
4.3 Монтаж электрических цепей
5 ОБЕСПЕЧЕНИЕ БЕЗОПАСНОСТИ ТРУДА ПРИ ЭКСПЛУАТАЦИИ И ОБСЛУЖИВАНИИ ЭЛЕКТРОВОЗА
5.1 Общие требования безопасности
5.2 Меры безопасности при входе в высоковольтную камеру
5.3 Меры безопасности при поднятии токоприёмника
5.4 Меры безопасности при поднятом токоприёмнике
5.5 Меры безопасности при питании электровоза от сети депо
5.6 Меры безопасности при устранении неисправностей в пути следования
5.7 Меры безопасности при ремонте электровоза
6 ЭКОНОМИЧЕСКОЕ ОБОСНОВАНИЕ МОДЕРНИЗАЦИИ
6.1 Общая характеристика показателей оценки экономической эффективности технических решений
6.2 Определение затрат на внедрение и реализацию противобоксовочной системы
6.3 Определение экономического эффекта
6.4 Определение показателей экономической эффективности
6.5 Итоговые положения о целесообразности модернизации электровозов 2(3)ЭС5К «Ермак»
Процесс моделирования будет осуществляться в пакете NI Multisim 2012.
3.3.1 Описание среды моделирования
NI Multisim – популярный программный пакет, позволяющий моделировать любые электронные схемы. В состав пакета входят более 2000 SPICE-моделей (Simulation Program with Integrated Circuit Emphasis – программа эмуляции со встроенным обработчиком схем) реальных элементов от известных производителей, таких как Phillips, National Semiconductor, NXP, Analog Devices и других. Простой интуитивно понятный интерфейс, наличие виртуальных измерительных приборов, приближенных к реальным аналогам, средства графического анализа результатов моделирования – это только малая часть особенностей, отличающих данный пакет моделирования от других программ-эмуляторов. Среди основных разделов программы можно выделить такие как:
- sources (источники питания);
- basic (базовые элементы);
- diodes (диоды и другие полупроводниковые элементы);
- transistors (транзисторы);
- analog (аналоговые компоненты);
- ttl, cmos (логические элементы);
- mcu (микроконтроллеры);
- advanced peripherals (современные периферийные устройства);
- misc digital (разные цифровые устройства);
- mixed (смешанные элементы);
- indicators (индикаторы);
- power (преобразователи мощности);
- misc (другие устройства);
- rf (радиокомпоненты);
- electro mechanical (электромеханические устройства);
- connectors (соединительные устройства);
- NI components (компоненты National Instruments).
Ещё одной особенностью среды моделирования Multisim является наличие интерактивных элементов, состояние которых можно изменять в режиме моделирования. К таким элементам относятся переключатели и потенциометры, малейшие изменения состояния которых мгновенно отражаются в имитации.
Инструмент Convergence Assistant (помощник сходимости) автоматически исправляет параметры SPICE, корректируя ошибки моделирования.
С каждой новой версией программы улучшается её функционал, появляются новые инструменты моделирования, расширяется база элементов, благодаря чему улучшается как точность, так и быстродействие моделяционных свойств программы. Возможность взаимодействия со средой разработки LabVIEW позволяет производить сопоставление теоретических и реальных данных на этапах создания печатных плат. Это приводит к уменьшению проектных ошибок и как следствие к ускорению создания проектов. Однако улучшение функционала программы тесно сопряжено с увеличением требований к оборудованию, так как нагрузка на центральный процессор и память возрастает, что требует улучшенной производительности. Современные реалии развития вычислительной электроники позволяют использовать среду моделирования широкому кругу лиц.
3.3.2 Описание модели электровоза и противобоксовочной системы
Упрощённая модель силовых цепей секции электровоза «Ермак» в режиме тяги представлена на рисунке 3.4.
Рисунок 3.4 – Модель секции электровоза «Ермак» в прикладном пакете Multisim 2012
Применительно к рисунку 3.4 тяговый трансформатор ОНДЦЭ-4350/25 представлен блоком Т1 с напряжением первичной обмотки 25000 В и количеством витков на первичной обмотке – 873, на вторичных по 11 витков [11].
Тяговые электродвигатели НБ-514Б представлены блоками М1–М4 DC_MACHINE_WOUND_FIELD с параметрами, указанными в [10].
Выпрямительно-инверторный преобразователь ВИП-4000М-УХЛ2 [19] представлен подсхемами VIP1 и VIP2 и работает на второй зоне регулирования. Вид данных подсхем представлен на рисунке 3.5.
Рисунок 3.5 – Вид подсхемы VIP1
Подсхема VIP2 по своему составу аналогична VIP1. В качестве тиристоров Т353-800 выбраны максимально приближенные по параметрам тиристоры 2N6405, имеющие обозначения на схеме D11–D16. Система управления преобразователем реализована на базе источников импульсов PULSE_VOLTAGE, имеющих обозначение на схеме V100, V200, V300, V400, V500 и V600.
Нагрузка на тяговые электродвигатели задаётся через подсхемы Vn1–Vn4 при помощи элементов U1–U4 ARBITRARY_LOAD, на которых регулируется скорость электровоза.
Состав подсхемы Vn1 представлен на рисунке 3.6. Подсхемы Vn2, Vn3 и Vn4 по своему составу аналогичны Vn1 и выполняют преобразование единиц измерения км/ч в об/мин, которые через элемент А2 GAIN_2_PIN и U6 RPM_TO_RAD_PER_SEC преобразуются во входное значение, подаваемое на тяговые электродвигатели.

Рисунок 3.6 – Вид подсхемы Vn1
Элемент GEARS моделирует зубчатую передачу электровоза с коэффициентом редукции, указанным в [20], и имеет обозначение U5.
Элементы L1–L4 INDUCTOR являются моделями сглаживающего реактора РС-19 [11].
Система ЭСО представлена блоками диодов D1–D8, индуктивным шунтом L5, являющимся моделью ИШ-009 [11] и IGBT-транзистором IRGTIN075M12, имеющим обозначение Q1. Управление IGBT-транзистором производится за счёт подачи управляющего напряжения от источника V5 через размыкатель S2.
Мультиметры ХММ1–ХММ4, работающие в качестве датчиков напряжения, измеряют величину разности потенциалов между средними точками тяговых электродвигателей M1–M4.
Графики токов тяговых электродвигателей снимаются с помощью элемента CURRENT_CONTROLLED_VOLTAGE_SOURCE. Токи якорей фиксируются датчиками V1–V4, а уравнительные токи – датчиками V01–V04 и передаются на осциллографы XSC1 и XSC3 соответственно.
3.3.3 Моделирование номинального тягового режима работы электровоза
Процесс возникновения и окончания боксования задаётся переключателем S1, который встроен в цепь нагрузки первого тягового электродвигателя (ТЭД).
График токов якорей ТЭД при отсутствии боксования колёсных пар (КП) представлен на рисунке 3.7.
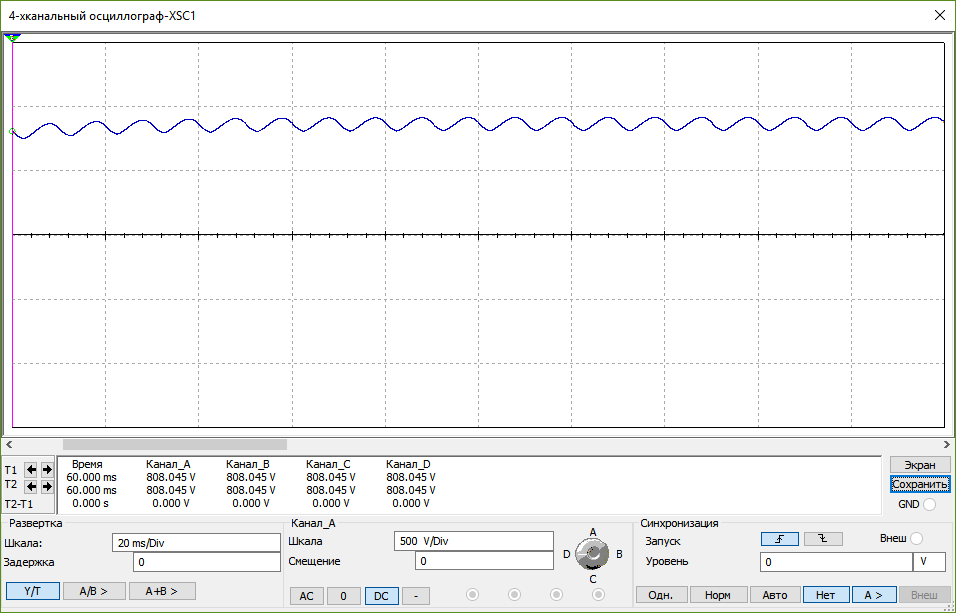
Рисунок 3.7 – Токи якорей ТЭД в номинальном режиме
Значения напряжений между средними точками в номинальном режиме представлены на рисунке 3.8.



г)
в)
б)
а)
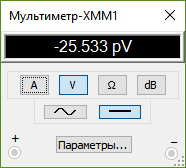
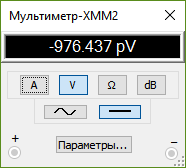
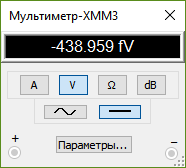
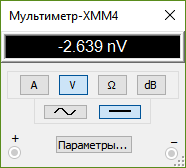
Рисунок 3.8 – Величина напряжений между средними точками ТЭД в номинальном режиме:
а – между 1 и 2 ТЭД; б – между 2 и 3 ТЭД; в – между 3 и 4 ТЭД; г – между 4 и 1 ТЭД
Из рисунка 3.8 видно, что в условиях равенства характеристик всех ТЭД разница потенциалов между средними точками почти отсутствует.
3.3.4 Моделирование боксования одного тягового электродвигателя
При моделировании боксования первого ТЭД были сняты диаграммы токов двигателей, представленные на рисунке 3.9.
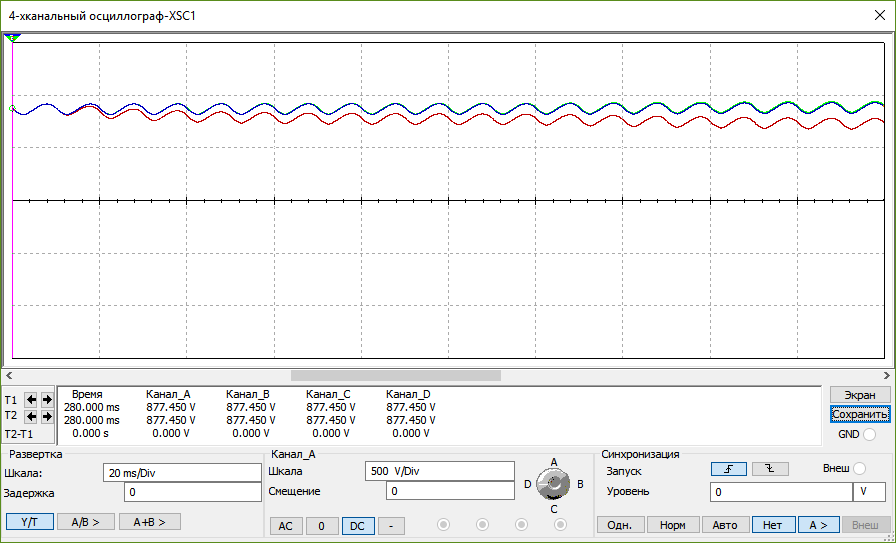
Рисунок 3.9 – Токи якорей ТЭД при начале боксования
На графике видно, что в момент начала боксования ток первого ТЭД начинает снижаться по отношению к токам других ТЭД до определённого установившегося значения. Значения напряжений между средними точками в режиме боксования представлены на рисунке 3.10.



г)
в)
б)
а)
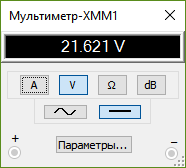
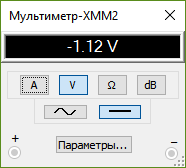
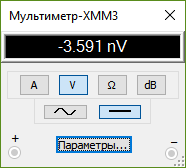
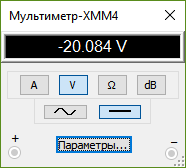
Рисунок 3.10 – Величина напряжений между средними точками ТЭД при боксовании:
а – между 1 и 2 ТЭД; б – между 2 и 3 ТЭД; в – между 3 и 4 ТЭД; г – между 4 и 1 ТЭД
После сигнала с датчика напряжения о начавшемся боксовании происходит открытие IGBT-транзистора и начинается процесс перетекания уравнительных токов, представленный на рисунке 3.11. Из рисунка видно, что уравнительный ток соседствующего с боксующим ТЭД превышает уравнительные токи, исходящие от двигателей, подключённых к другому выпрямительно-инверторному преобразователю (ВИП).
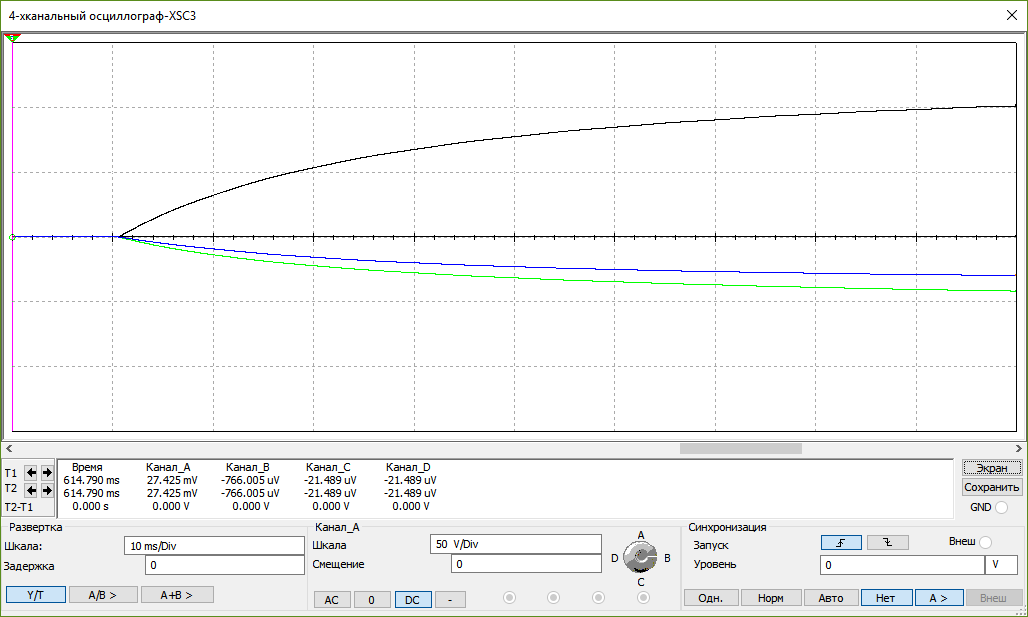
Рисунок 3.11 – Осциллограмма уравнительных токов:
верхний график – ток подпитки ТЭД боксующей КП; средний график – токи от ТЭД другого ВИП; нижний график – уравнительный ток от соседствующего с боксующей КП ТЭД
Процесс окончания боксования сопровождается постепенным выравниванием токов всех ТЭД и представлен на рисунке 3.12. Однако этот вид боксования является самым благоприятным, так как подразумевает идентичность характеристик всех ТЭД секции электровоза. В реальности это достаточно маловероятно и зачастую двигатели имеют значительный «разброс» характеристик. В дальнейших подразделах будут произведены исследования не только этого, но и других видов боксования.
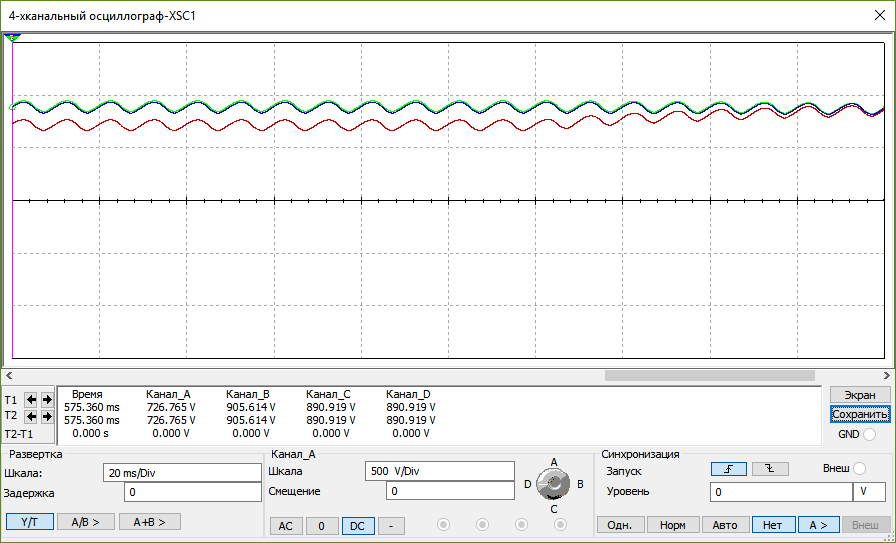
Рисунок 3.12 – График токов ТЭД в процессе окончания боксования одной КП
3.3.5 Моделирование боксования двух ТЭД одного ВИП
При движении электровоза на сложных участках пути или в неблагоприятных условиях сцепления колеса с рельсом
, может возникнуть ситуация, когда боксование начнётся не одной колёсной пары, а нескольких. В этом случае процессы в противобоксовочной системе несколько изменятся.
При условии боксования одновременно колёсных пар первого и второго ТЭД или колёсных пар третьего и четвёртого ТЭД, которые являются соседствующими и по ВИП, и по тележке, разность потенциалов, фиксируемая датчиками напряжения, изменяется. Для случая боксования колёсных пар первого и второго ТЭД значения разности потенциалов представлены на рисунке 3.15. Диаграмма токов якорей ТЭД представлена на рисунке 3.13, а диаграмма уравнительных токов – на рисунке 3.14.
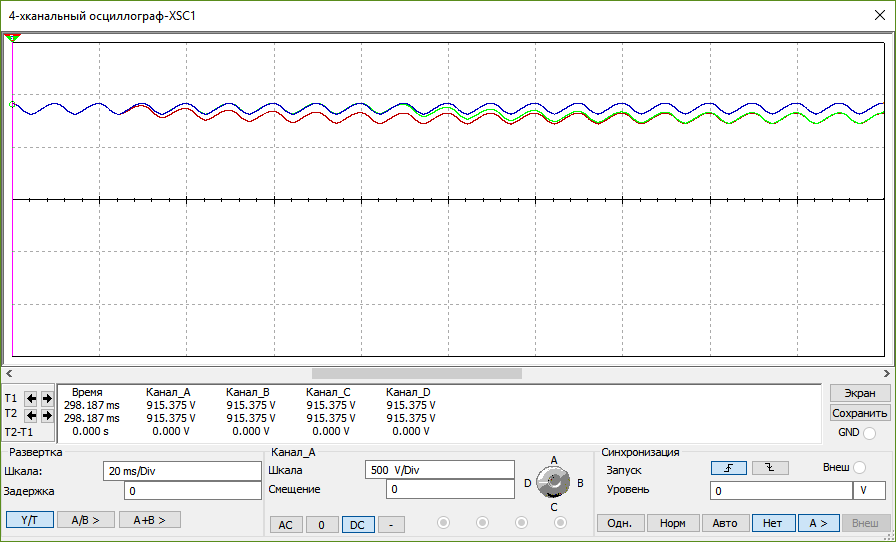
Рисунок 3.13 – Токи якорей ТЭД при начале боксовании сначала одной КП, а затем второй
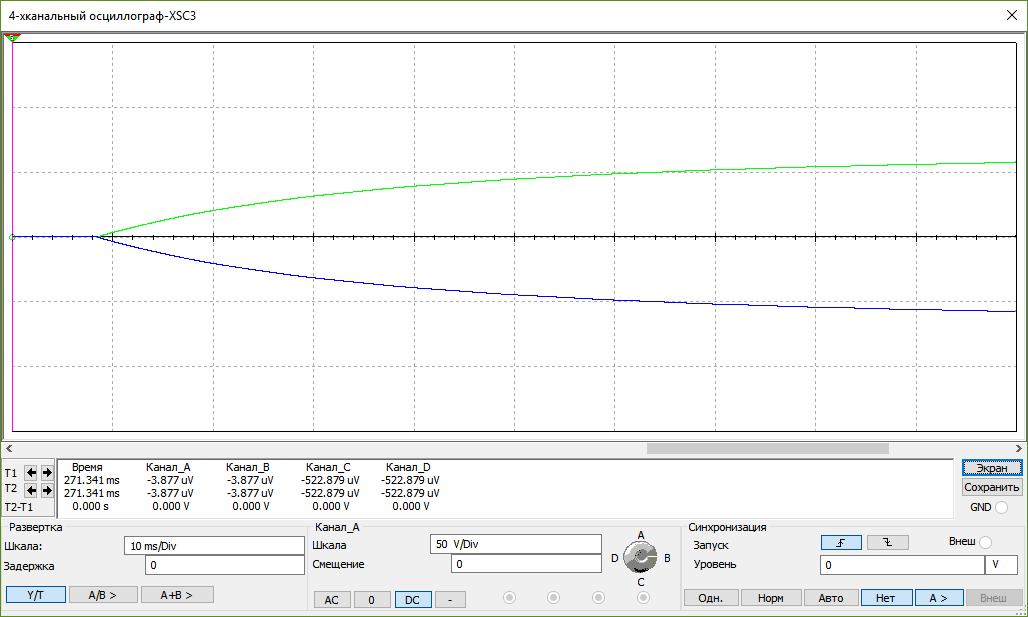
Рисунок 3.14 – Осциллограмма уравнительных токов:
верхний график – токи подпитки ТЭД боксующих КП; нижний график – уравнительные токи от ТЭД небоксующих КП другого ВИП
г)
в)
б)
а)
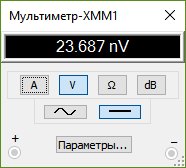
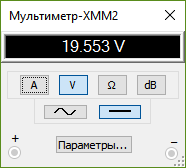
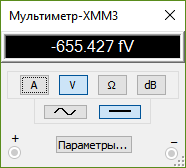
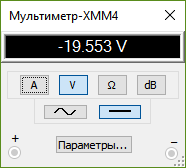
Рисунок 3.15 – Величина напряжений между средними точками ТЭД при боксовании:
а – между 1 и 2 ТЭД; б – между 2 и 3 ТЭД; в – между 3 и 4 ТЭД; г – между 4 и 1 ТЭД
Применительно к рисунку 3.14 для условий одинаковых характеристик ТЭД протекание уравнительных токов равномерно распределяется между двумя ТЭД боксующих и двумя ТЭД небоксующих колёсных пар. Также в данном режиме наблюдается в момент начала боксования резкий скачок напряжения на втором и четвёртом датчиках, установленных между средними точками второго и третьего ТЭД и четвёртого и первого ТЭД соответственно.