Файл: Литература 25 Краткая история развития эргономики 27.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 12.12.2023
Просмотров: 996
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
Эргономика и ее место в системе наук
Краткая история развития эргономики
Принципы эргономического анализа трудовой деятельности
5. Эргономические основы проектирования техники
Эргономические основы организации рабочего места
Оптимизация средств и систем отображения информации
Оптимизация рабочих движений и органов управления
Учет факторов среды при оптимизации системы «человек—машина»
Форма и размеры приводного элемента выключателей и переключателей типа «Тумблер» должны соответствовать антропометрическим данным пальцев человека и физиологическим свойствам, а также обеспечивать максимальное удобство захвата приводного элемента в процессе управления. Форма приводного элемента выключателей и переключателей типа «Тумблер» должна быть конусообразной или цилиндрической (цилиндрическую часть на конце приводного элемента допускается выполнять в виде «шарика» или «лопатки»). Для случаев, когда необходимо кодирование, форма приводного элемента может быть любой, но удовлетворяющей требованиям в плане прилагаемых усилий. Допускается также кодирование цветной меткой на торце приводного элемента.
В выключателях и переключателях типа «Тумблер» при переводе приводного элемента в другую позицию должна быть обратная связь, ощущаемая в виде «щелчка».
Положение приводного элемента выключателей и переключателей типа «Тумблер» «Вверх» или «Вправо» должно соответствовать функциональному состоянию «Включено», а положение приводного элемента «Влево» или «Вниз» — состоянию «Выключено». При расположении выключателей и переключателей типа «Тумблер» в ряд не допускается расположение такого ряда «по вертикали» или «в глубь» панели от оператора.
Для обозначения функции приводных элементов выключателей и переключателей типа «Тумблер» необходимо применять надписи и символы. Располагать надписи и символы следует на панели управления в непосредственной близости от приводных элементов с любой его стороны при условии, что сами приводные элементы, а также рука человека-оператора не будут перекрывать обозначение во время манипулирования приводными элементами.
По.прилагаемым усилиям переключатели и выключатели типа «Тумблер» делятся на два типа: «легкие» — усилия до 0,7 кг и «тяжелые» — усилия выше 0,7 кг. Размеры приводного элемента зависят от величины прилагаемого усилия и должны соответствовать размерам, приведенным в табл. 14.
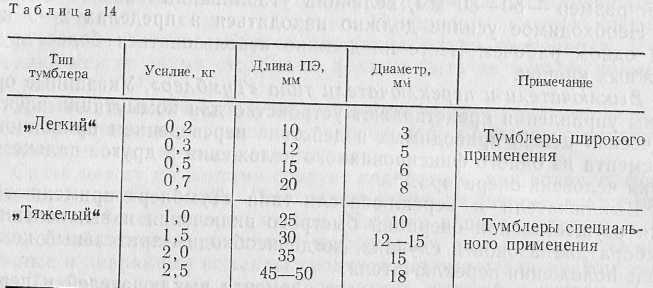
В двухпозиционном переключателе типа «Тумблер» угол перемещения приводного элемента (по средней линии) из одного положения в другое должен составлять 40/60°, в трехпозиционном — 30/50°.
Для усилий, превышающих 2,5 кг, следует применять выключатели и переключатели типа «Рычаг». На рабочей поверхности приводных элементов1 не должно быть острых кромок и граней.
При размещении тумблеров на панели управления минимальное расстояние между осевыми линиями приводных элементов должно быть 12 мм, при работе в перчатках —25 мм. Если приводные элементы перекидываются в противоположных направлениях, их концы должны быть удалены друг от друга на расстояние не менее чем на 19 мм.
Клавиши с надписями. К этим органам управления предъявляются следующие требования:
-
для надежного указания о срабатывании клавиши с надписями должны иметь фиксатор или защелку; -
надпись на клавише должна хорошо читаться при освещении только одной лампой; -
должна предусматриваться проверка подсвета нажимом; лампы подсвета или нити накаливания должны быть резервированы; -
лампы подсвета клавиши с надписями должны заменяться с передней стороны панели; крышки с надписями должны снабжаться направляющими для предотвращения возможности их неправильной установки; -
на пластинке с надписями допускается не более трех строк.
___________________________
1 Рабочая поверхность приводного элемента — участок его поверхности, непосредственно соприкасающийся с пальцами руки человека-оператора в момент приведения в действие подвижной системы выключателя или переключателя.
Рычаги. Рассматриваются органы управления, предназначенные для выполнения ступенчатых переключений и плавного динамического регулирования одной или двумя руками.
Минимальная длина свободной части рычага управления (вместе с рукояткой) в любом его положении должна быть не менее 50 мм для захвата пальцами и 150 мм для захвата всей кистью.
Форма, размер рукояток рычагов должны обеспечивать максимальное удобство их захвата и надежного удержания в процессе управления. При этом предпочитают рукоятки с плавными округлыми формами (близкими к шаровидной и удлиненно-цилиндрической), тщательно обработанной гладкой или рифленой поверхностью без острых углов и заусенцев. Рукоятки рычагов, используемых в условиях низкой температуры окружающей среды, должны изготовляться из материалов или покрываться материалами, которые обладают низкой теплопроводностью.
Для одновременного выполнения нескольких управляющих действий (более чем в двух измерениях) допускается применять рычаги управления в комбинации и едином конструктивном исполнении с другими типами органов управления (штурвалом, кнопкой, защелкой и др.). Каждый из них должен отвечать своим специфическим эргономическим требованиям.
Рычаги управления необходимо устанавливать на рабочем месте так, чтобы их рукоятки при любом положении рычага находились в пределах зоны досягаемости моторного поля оператора с учетом требований безопасности. Рукоятки рычагов, перемещаемых одной рукой, необходимо размещать на стороне соответствующей действующей правой или левой руке в пределах досягаемости при сгибе ее в локтевом суставе под углом 90—135° и приложении усилия по направлению прямо «на себя — от себя». Рукоятки рычагов, перемещаемых двумя руками, размещают в плоскости симметрии сиденья с отклонениями не более 50 мм. Направление перемещения рукоятки рычага должно определяться в зависимости от характера и особенностей управления при соблюдении соответствия с направлением движения управляемого объекта и соответствующего указателя индикатора.
Для использования рычагов точного и непрерывного регулирования в отдельных случаях (при наличии сотрясений, 'вибраций, ускорений и др.) должна быть обеспечена опора:
-
локтю — при больших (широких) движениях кистью с предплечьем; -
предплечью — при движениях кистью; запястью — при движениях пальцами.Кодирование рукояток рычагов управления, в том числе и рычагов специального назначения (аварийных, противопожарных и др.), а также рычагов, объединенных в функциональные группы, необходимо проводить выбором соответствующей формы, размера и цвета, а также расположением. Рычаги управления должны иметь хорошо видимые надписи, обозначающие их назначение, а также указатели положения, направления перемещения и его следствия, помещаемые как непосредственно на рычагах, так и рядом с ними.
Рычаги, применяемые для дискретных (ступенчатых) переключений, должны иметь надежную фиксацию промежуточных и конечных положений. В необходимых случаях конечные положения рычага должны быть ограничены специальным стопором (упором). Рычаги управления должны быть установлены так, чтобы при их перемещении исключалась возможность случайного включения (выключения) смежного рычага.
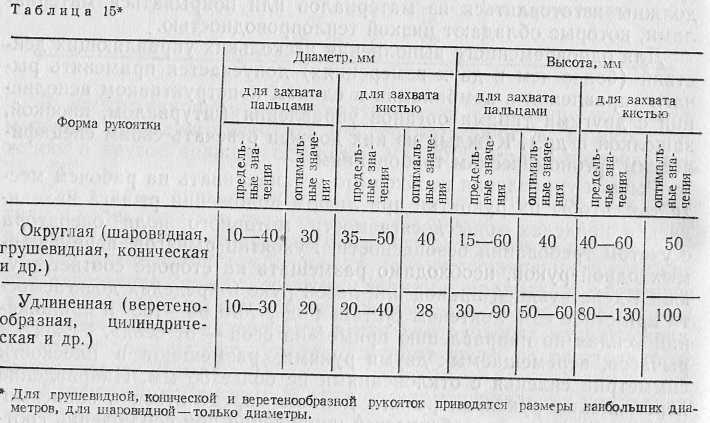
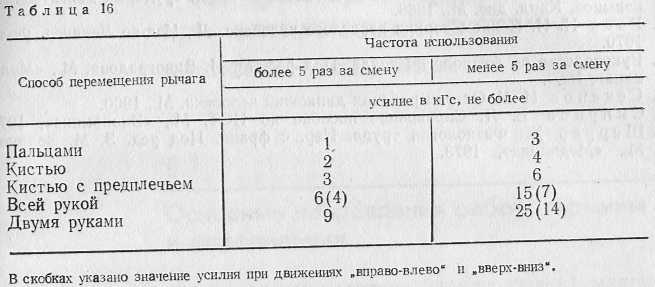
Основные размеры рукояток рычагов управления в зависимости от их форм и способа захвата должны находиться в пределах, указанных в табл. 15. Значения усилий, прилагаемых к рукояткам рычагов управления, в зависимости от способа их перемещения и частоты использования должны соответствовать приведенным в табл. 16.
При перемещении рычага чаще 2 раз в 1 мин прикладываемое к рукоятке усилие должно быть не более 50% от указанного в табл. 16. Усилие, прикладываемое к рукоятке рычага ручного привода в момент запирания заторного органа или сдвиге (перемещении), не должно превышать 45 кГс.
Интервалы между рукоятками смежных рычагов управления,, расположенных в одной плоскости, должны быть не менее: 50 мм— при перемещениях одной рукой последовательно или в случайном порядке; 100 мм — при перемещении одновременно двумя руками; 130 мм — при работе в рукавицах или перчатках; 150 мм — при отсутствии визуального контроля за рычагами.
Педали. Эти органы управления часто используются в конструкции рабочих мест транспортных средств, когда руки оператора заняты. Педаль служит как для ввода дискретных сигналов, так и для непрерывного регулирования параметров. При небольшой точности действий с помощью педалей могут быть получены значительные усилия.
Педали конструируются таким образом, чтобы они возвращались в нулевое положение после прекращения действия на них силы.
Когда угол педали с горизонтальной плоскостью составляет более 20°, следует использовать опору для пятки. Педали должны быть покрыты нескользким материалом. Их длина и ширина должны быть примерно равны максимальным размерам стопы (в соответствующей обуви).
ЛИТЕРАТУРА
1. Бернштейн Н. А. Очерки по физиологии движений и физиологии активности. AL, «Медицина», 1966.
2. Биологические аспекты кибернетики. М., Изд-во АН СССР, 1962.
3. Гордеева Н. Д., Девишвили В. М., 3 и н ч е н к о В. П. Микроструктурный анализ исполнительной деятельности. М., изд. ВНИИТЭ, 1975.
4. Донской Д. Д. Биомеханика. М., «Просвещение», 1975.
5. Запорожец А. В. Развитие произвольных движений. М., Изд-во АПН РСФСР, 1960.
6. 3 а п о р о ж е ц А. В., В е н г е р А. В., 3 и н ч е н к о В. П., Р у з с к а я А. Г. Восприятие и действие. М., «Просвещение», 1967.
7. Зинченко В. П., Верти л ее Н. Ю. Формирование зрительного образа. М., Изд-во Моск. ун-та, 1969.
8. Коси лов С. А. Физиологические основы НОТ. М., «Экономика», 1969. 9. Леонтьев А. Н., Запорожец А. В. Восстановление движения. М., «Советская наука», 1945.
10. Ломов Б. Ф. Человек и техника. Л., Изд-во Ленингр. ун-та, 1963.
11. Любомирский Л. Е. Управление движениями у детей и подростков. М., «Педагогика», 1974.
12. Мойкии Ю. В. Особенности становления сложных трудовых двигательных навыков. Канд. дис. М., 1968.
13. Розе Н. Н. Психомоторика взрослого человека. Л., Изд-во Ленингр. ун-та, 1970.
14. Руководство по физиологии труда. Под ред. М. И. Виноградова. AL, «Медицина», 1969.
15. Сеченов И. М. Очерки рабочих движений человека. М., 1900.
16. Смирнов Е. Л. Справочное пособие по НОТ. М., «Экономика», 1973. .17. Ш ер pep Ж. Физиология труда. Пер. с франц. Под ред. 3. М. Золиной. М., «Медицина», 1973.