Файл: Учебное пособие по дисциплине Механика Модуль Прикладная механика.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 10.01.2024
Просмотров: 707
Скачиваний: 1
СОДЕРЖАНИЕ
7.2.Изгиб с растяжением (сжатием)………………….……………………………….92
7.3.Внецентренное сжатие или растяжение………………….………………………93
Вопросы для самопроверки……………………………………………………………99
8.Прочность при переменных и циклически изменяющихся напряжениях…………………………………………………………………………….100
8.1.Усталость и выносливость материалов…………………….……………………100
8.2.Основные характеристики цикла и предел усталости……………….…………102
8.3.Расчет коэффициентов запаса усталостной прочности………………….……...104
Библиографический список………………………………………………..………152
АННОТАЦИЯ ДИСЦИПЛИНЫМЕХАНИКА. МОДУЛЬ ПРИКЛАДНАЯ МЕХАНИКА
1.9. Общие принципы расчета конструкции
3. Осевое растяжение – сжатие.
4. Геометрические характеристики плоских сечений
5.1. Основные понятия. Крутящий момент
Условие прочности при кручении вала круглого и кольцевого сечения
7.1.Расчет балки, подверженной косому или пространственному изгибу
7.2. Изгиб с растяжением (сжатием)
8. Прочность при переменных и циклически изменяющихся напряжениях
Силы инерции звеньев и моменты сил инерции.
Так как звенья механизма находятся в движении, и имеют свои массы, то, особенно в быстродействующих механизмах рычажного типа, обязательно имеет место неравномерность движения звеньев. Это означает, что ускорения этих звеньев не равны нулю, что приводит к возникновению дополнительных сил динамического характера в виде сил инерции и моментов инерции . Из теоретической механики известно, что все силы инерции звена, совершающего плоскопараллельное движение и имеющего плоскость симметрии, параллельную плоскости движения, могут быть сведены к силе инерции , приложенной в центре масс S звена, и паре сил инерции, момент которых обозначим (рис. 9.30).
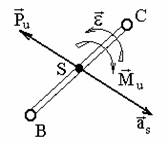
Рис. 9.30. Сила инерции звена и момента сил инерции
– главный вектор сил инерции, или сила инерции;
– главный момент сил инерции, или момент сил инерции;m – масса звена;
– массовый момент инерции относительно центра масс;
– ускорение центра масс;
– угловое ускорение звена.
и направлены в стороны, противоположные ускорениям и .
Статическая определимость кинематической цепи
При силовом анализе механизмов (определении неизвестных сил, действующих на движущиеся звенья) можно использовать уравнения (законы) статики. Докажем это положение, проанализировав реакции в кинематических парах (табл. 9.2).
Таблица 9.2.
| Кинематические пары | Равновесие каждого звена | Известные параметры | Неизвестные параметры |
| 5-й класс Вращательная | 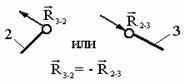 | Точка приложения | Величина, направление |
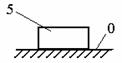 Поступательная | 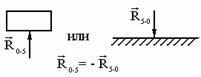 | Направление | Величина, точка приложения |
| 4-й класс  | 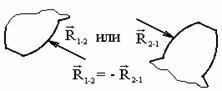 | Точка приложения, направление | Величина |
Примечание. 2, 3, 5 – номера звеньев.
В кинематических парах 5-го класса известно по одному параметру сил реакций, неизвестны два, в кинематических парах 4-го класса известны два параметра, а неизвестен один.
Таким образом, плоская кинематическая цепь, состоящая из кинематических пар 5-го и 4-го классов, имеет 2Р5 + Р4 неизвестных величин сил реакций.
В то же время для одного звена можно составить 3 уравнения статики, а для n звеньев – 3n уравнений статики.
Кинематическая цепь будет статически определима, если число неизвестных величин сил реакций не превышает числа возможных уравнений статики, т.е.
3n = 2P5 + Р4.
Это и есть условие статической определимости кинематической цепи.
Полученное равенство можно записать в виде
3n – 2Р5 – Р4 = 0.
Но запись слева от знака равенства является числом степеней свободы кинематической цепи W, т.е.
W = 3n – 2Р5 – P4 = 0.
Таким свойством (W=0) обладают структурные группы, или группы Ассура –статически определимые кинематические цепи.
Силовой анализ механизма с учетом сил трения
9.6. Трение в механизмах. Виды трения.
Способность контактирующих поверхностей звеньев сопротивляться их относительному движению называется внешним трением. Трение обусловлено неидеальным состоянием контактирующих поверхностей (микронеровности, загрязнения, окисные пленки и т.п.) и силами межмолекулярного сцепления. Трение в кинематических парах характеризуется силами трения и моментами сил трения. Силой трения называется касательная составляющая реакции в кинематической паре (составляющая направленная по касательной к контактирующим поверхностям), которая всегда направлена против вектора скорости относительного движения звеньев.
Различают следующие виды трения:
- трение покоя проявляется в момент, когда два тела находящиеся в состоянии относительного покоя начинают относительное движение (касательную составляющую возникающую в зоне контакта до возникновения относительного движения, в условиях когда она меньше силы трения покоя, будем называть силой сцепления; максимальная величина силы сцепления равна силе трения покоя);
- трение скольжения появляется в кинематической паре при наличии относительного движения звеньев; для большинства материалов трение скольжения меньше трения покоя;
- трение качения появляется в высших кинематической паре при наличии относительного вращательного движения звеньев вокруг оси или точки контакта;
- трение верчения возникает при взаимодействии торцевых поверхностей звеньев вращательных кинематической паре (подпятники).
Сила трения покоя зависит от состояния контактных поверхностей звеньев, а сила трения скольжения - также и от скорости скольжения.
Теоретические основы определения коэффициента трения
Трение в поступательной кинематической паре
При перемещении одного тела (звена механизма) относительно находящегося с ним в контакте другого тела (звена) в месте их контакта возникает сила, сопротивляющаяся перемещению, – сила трения F (рис. 9.31).
Величину коэффициента трения в поступательной кинематической паре можно определить с помощью так называемого закона Кулона, в соответствии с которым величина силы трения F прямо пропорциональна нормальной силе N между соприкасающимися звеньями. Векторная сумма сил и равна полной силе реакций в кинематической паре: (рис. 30).
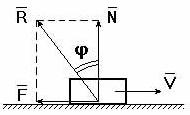
Рис. 9.31. Схема сил в поступательной кинематической паре
Отношение называют коэффициентом трения скольжения в поступательной кинематической паре, а угол – углом трения скольжения.
Полная реакция отклоняется на угол трения в сторону, противоположную скорости (см. рис. 4.16).
Величину коэффициента трения скольжения f можно определить экспериментально или по справочникам (величина f зависит от шероховатости, материалов, трущихся поверхностей, наличия смазки, ее качества, температуры и т.д.).
Трение во вращательной кинематической паре
Внешние нагрузки, действующие на вал при его вращении, показаны на схеме рис. 9.32.
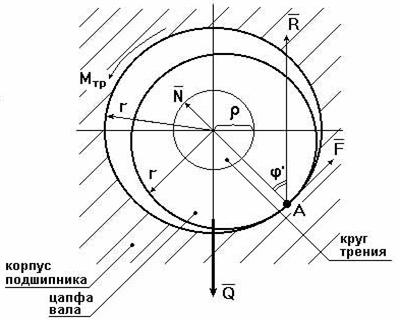
Рис. 9.32. Схема сил во вращательной кинематической паре
Здесь А – точка приложения нормальной реакции , причем – равнодействующая всех нормальных сил (эпюра этих сил может иметь различный вид), (рис. 32); – сила трения (равно-действующая всех сил трения, распределенных по поверхности контакта); – сила давления цапфы вала на опору (корпус подшипника); – сила реакции во вращательной кинематической паре, ; ; – угол трения;
r – радиус цапфы (опорной части) вала; – радиус круга трения; – приведенный коэффициент трения.
Во вращательной кинематической паре реакция отстоит от оси вращения на величину радиуса круга трения , причем всегда касательна к кругу трения.
Момент трения .
Величину можно определить:
– экспериментально (например, используя метод выбега);
– по эмпирическим формулам с учетом износа подшипника и соответствующего изменения эпюр давления (рис. 32): для нового подшипника , для изношенного – , где f – коэффициент трения скольжения в поступательной кинематической паре (берется из справочников).
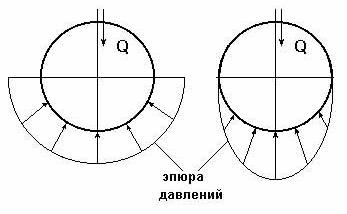
а) б)
Рис. 9.33. Примерные схемы эпюр давления в новом
(а) и изношенном (б) подшипниках скольжения
Трение качения в высшей кинематической паре
Картину внешних сил и эпюр распределения давлений в месте контакта тел качения можно условно отобразить на нижеприведенных схемах (рис. 9.34). В состоянии покоя эпюра напряжений в зоне контакта симметрична относительно общей нормали, проведенной через условную точку касания, а равнодействующая силаN совпадает с нормалью. При качении симметрия эпюры нарушается, а силаN смещается в направлении качения на расстояние k.
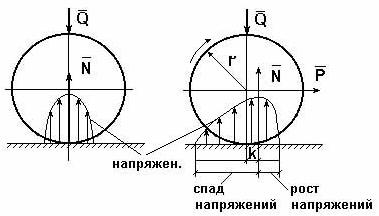
а) б)
Рис. 9.34. Примерные схемы сил и эпюр давления в зоне контакта цилиндра
с плоскостью: а) состояние покоя; б) состояние перекатывания
Здесь – равнодействующая сила давлений в месте смятия соприкасающихся звеньев (тел качения); – нагружающая сила, ; – момент трения качения; – плечо силы трения качения или коэффициент трения качения (имеет размерность длины); – сила перекатывания.
Условие равновесия перекатывающегося тела в форме моментов можно записать как , откуда .
9.7. Динамика машин и механизмов.
Общие положения
Динамика - раздел механики машин и механизмов, изучающий закономерности движения звеньев механизма под действием приложенных к ним сил. Имеется такое определение: “Динамика рассматривает силы в качестве причины движения тел”. В основе динамики лежат три закона, сформулированные Ньютоном, из которых следует:
Из первого закона: Если равнодействующая всех внешних сил, действующих на механическую систему равно нулю, то система находится в состоянии покоя.
Из второго закона: Изменение состояния движения механической системы может быть вызвано либо изменением действующих на нее внешних сил, либо изменением ее массы.
Из этих же законов следует, что динамическими параметрами механической системы являются:
- инерциальные (массы mи моменты инерции I);
- силовые (силы Fij и моменты сил Mij);
- кинематические (линейные aи угловые ускорения).
Динамическая модель - модель системы, предназначенная для исследования ее свойств в функции времени (или модель системы, предназначенная для исследования в ней динамических явлений).
Прямая задача динамики - определение закона движения системы при заданном управляющем силовом воздействии.
Обратная задача динамики- определение требуемого управляющего силового воздействия, обеспечивающего заданный закон движения системы.
Методы составления уравнений (динамической модели системы):
- энергетический (уравнения энергетического равновесия - закон сохранения энергия);
- кинетостатический (уравнения силового равновесия с учетом сил инерции по принципу Д’Аламбера).
Задачами динамического анализа и синтеза механизма, машины являются изучение режимов движения с учетом действия внешних сил и установление способов, обеспечивающих заданные режимы движения. При этом могут определяться мощности, необходимые для обеспечения заданного режима движения машины, проводиться сравнительная оценка механизмов с учетом их механического коэффициента полезного действия, устанавливаться законы движения ведущего звена (например, колебания угловой скорости кривошипа за один оборот) под действием внешних сил, приложенных к звеньям механизма, а также решаться задачи подбора оптимальных соотношений между силами, массами, размерами звеньев механизмов.
В динамике машин объектом изучения (исследования) является машинный агрегат. В общем виде его можно представить как механическую систему, состоящую из трех основных частей: машина-двигатель, передаточный механизм и рабочая машина (или исполнительный механизм).
В машине-двигателе какой-либо вид энергии преобразуется в механическую энергию, необходимую для приведения в движение рабочей машины. Например, в электродвигателе электрическая энергия преобразуется в механическую, а в двигателе внутреннего сгорания в механическую энергию преобразуется тепловая энергия сгорания топлива.