Добавлен: 12.01.2024
Просмотров: 140
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
1 Расчет характеристик электродвигателя, построение нагрузочной диаграммы
1.1 Расчет требуемой мощности, момента и частоты вращения электродвигателя
1.2 Построение нагрузочной диаграммы
2 Выбор электродвигателя и проверка его на перегрузку
2.2 Проверка двигателя на перегрузочные нагрузки
6 Разработка структурной схемы системы
6.1 Расчет передаточных функций
6.2 Разработка структурной схемы системы
6.3 Расчет статической ошибки замкнутой системы
7 Настройка системы на технический оптимум
6.2 Разработка структурной схемы системы
П
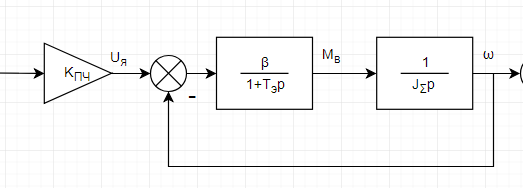
Рисунок 5-разомкнутая система
остроим структурную схему разомкнутой системы. На рисунке 5 показана структурная схема разомкнутой системы
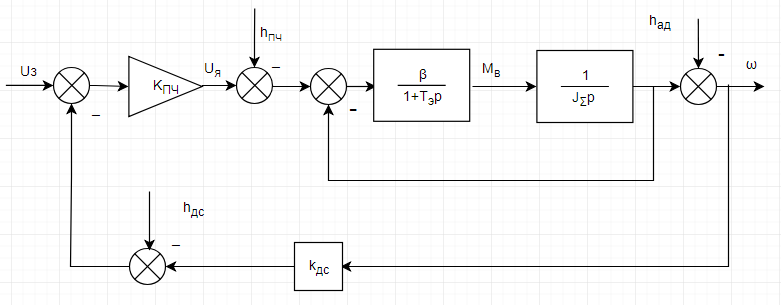
На рисунке 6 изображена замкнутая система.
Рисунок 6-Замкнутая система
6.3 Расчет статической ошибки замкнутой системы
Статическая ошибка определяется следующей формулой:
 , (28)
, (28)где
 -ошибка изменения напряжения питающей сети,
-ошибка изменения напряжения питающей сети, -ошибка двигателя, обусловленная скольжением,
-ошибка двигателя, обусловленная скольжением, -ошибка, определяемая разрешением энкодера.
-ошибка, определяемая разрешением энкодера.Одним из основных возмущающих воздействий двигателя являетсяизменение его скорости вращения, обусловленное скольжением.
 =0,04*3000=120[об/мин].
=0,04*3000=120[об/мин].Основным возмущающим воздействием управляемого преобразователябудет изменение напряжения питающей сети. Величину данной помехи возьмем согласно стандарту ГОСТ 13109-97, определяющего нормы качестваэлектрической энергии в системах энергоснабжения. Колебания напряженияпитающей сети определяются предельно допустимым значением суммыустановившегося отклонения напряжения δUy и размаха измененийнапряжения δUt в точках присоединения к электрическим сетям. Принапряжении 0,38 кВ это значение равно ± 10 % от номинального напряжения:
 =0,1*3000=300[об/мин].
=0,1*3000=300[об/мин].Основное возмущающее воздействие от энкодера при передаче им скорости вращения асинхронного двигателя будет определяться разрешением датчика:
 =0,0003 [об/мин].
=0,0003 [об/мин].Подставим найденные значения в формулу (28) и получим значение статической ошибки:
 [об/мин].
[об/мин].Относительная статическая ошибка будет равна:
 . (29)
. (29)Полученное значение статической ошибки превышает требуемое по заданию. Исходя из этого необходимо настроить систему на технический оптимум.
7 Настройка системы на технический оптимум
Д

Рисунок 7-Система до настройки
ля начала построим переходную характеристику системы без настройки. На рисунке 7 показана переходная характеристика системы до коррекции. Структурная схема для построения переходного процесса системы до коррекции изображена на рисунке Б.1 в приложении Б.
Для настройки системы добавим ПИД-регулятор в систему и подберем его коэффициенты для обеспечения требуемой статической ошибки. На рисунке 8 показан переходный процесс системы после настройки.
В результате настройки системы были подобраны следующие параметры ПИД-регулятора:
П=57; И=400; Д=0,35
Структурная схема для построения переходного процесса системы после настройки изображена на рисунке Б.2 в приложении Б.

Рисунок 8-Система после настройки
8 Схема общей автоматики
При условии, что вызов происходит из кабины:
Кнопки S3- S5 служат для выбора этажа. S3 – подняться на первый этаж. S4 – на третий. S5 – на седьмой.
Если лифт находится на первом этаже (DI7) и двери лифта закрыты (DI10):
-
Нажатие кнопки S3 (DI1) остановка двигателя (DO3). -
Нажатие кнопки S4 (DI2) приведет в действие ЭП, лифт начнет движение вверх (DO1). -
Нажатие кнопки S5 (DI3) приведет в действие ЭП, лифт начнет движение вверх (DO1).
Если лифт находится на третьем этаже (DI8) и двери лифта закрыты (DI10):
-
Нажатие кнопки S3 (DI1) приведет в действие ЭП, лифт начнет движение вниз (DO2). -
Нажатие кнопки S4 (DI2) остановка двигателя (DO3). -
Нажатие кнопки S5 (DI3) приведет в действие ЭП, лифт начнет движение вверх (DO1).
Если лифт находится на седьмом этаже (DI9) и двери лифта закрыты (DI10):
-
Нажатие кнопки S3 (DI1) приведет в действие ЭП, лифт начнет движение вниз (DO2). -
Нажатие кнопки S4 (DI2) приведет в действие ЭП, лифт начнет движение вниз (DO2). -
Нажатие кнопки S5 (DI3) остановка двигателя (DO3).

Рисунок 9 – Программа функционирования лифта при вызове из кабины
При условии, что вызов происходит на этаже:
Кнопки S6-S8 служат для вызова лифта на этаж. S6 – вызывает лифт на первый этаж. S7 – на третий,S8 – на седьмой.
Если вызов происходит на первом этаже S6 (DI4) и двери лифта закрыты (DI10):
-
Лифт находится на первом этаже (DI7): остановка двигателя (DO3). -
Лифт находится на третьем этаже (DI8): Лифт начнет двигаться вниз (DO2). -
Лифт находится на седьмом этаже (DI9): Лифт начнет двигаться вниз (DO2).
Если вызов происходит на третьем этаже S7 (DI5) и двери лифта закрыты (DI10):
-
Лифт находится на первом этаже (DI7): Лифт начнет двигаться вверх (DO1). -
Лифт находится на третьем этаже (DI8): остановка двигателя (DO3). -
Лифт находится на седьмом этаже (DI9): Лифт начнет двигаться вниз (DO2).
Если вызов происходит на седьмом этаже S8 (DI6) и двери лифта закрыты (DI10):
-
Лифт находится на первом этаже (DI7): Лифт начнет двигаться вверх (DO1). -
Лифт находится на третьем этаже (DI8): Лифт начнет двигаться вверх (DO1). -
Лифт находится на седьмом этаже (DI9): остановка двигателя (DO3).
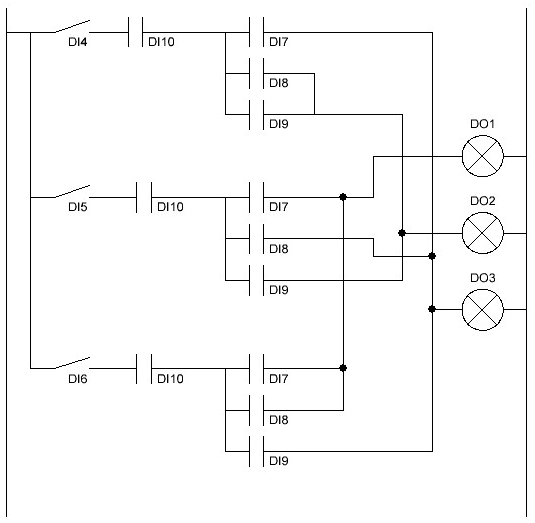
Рисунок 10 – Программа функционирования лифта при вызове с этажа
Логические выражения полученые на основании составленных программ, будут выглядеть следующим образом:
DO1 = DI10*(DI7*DI2+ DI7*DI3+DI8*DI3+DI5*DI7+DI6*DI7+DI6*DI8)
DO2 = DI10* (DI8*DI1+DI9*DI1+DI9*DI2+DI4*DI8+DI4*DI9+DI5*DI9)
DO3 = DI10* (DI7*DI1+DI8*DI2+DI9*DI3+DI4*DI7+DI5*DI8+DI6*DI9)
| | DI1 | DI2 | DI3 | DI4 | DI5 | DI6 | DI7 | DI8 | DI9 | DI10 | Датчик | |
| Вызов с этажа | ˄ | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 0 | 1 | DO1 |
| ˅ | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 1 | 1 | 1 | DO2 | |
| = | 0 | 0 | 0 | 1 | 0 | 1 | 1 | 0 | 1 | 1 | DO3 | |
| Вызов из кабины | ˄ | 0 | 1 | 1 | 0 | 0 | 0 | 1 | 1 | 0 | 1 | DO1 |
| ˅ | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | DO2 | |
| = | 1 | 1 | 1 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | DO3 | |
9 Принципиальная электрическая схема
Принципиальная электрическая схема управления лифтом представлена в приложении Г.
На данной схеме приняты следующие обозначения:
QS1-автомат питания
SQ1-концевой выключатель шкафа управления
SB1-кнопка для подачи питания к схеме
KM1-контактор для замыкания силовой цепи
E1-лампочка, сигнализирующая о наличии напряжения в цепи
M-электродвигатель
SC1-частотный преобразователь altivar 71
VW3A3401-доп. Интерфейсная карта altivar 71 для подключения энкодера
BR1-инкрементальный энкодер
S1-герконовый контактор, который служит для индикации состояния, когда двери лифта закрыты
S2-S7-герконовые контакторы, сигнализирующие о местоположении лифта между этажами. На каждом этаже установлено два таких контактора, одни сверху, другой снизу. В верхней и нижней частях лифта установлены постоянные магниты. Когда лифт находится на этаже оба герконовых контактора под действием электромагнитного поля пропускают ток, тем самым информируя о том, где находится лифт. Если замкнут только один из контакторов, то это значит, что лифт находится между этажами.
КМ3-КМ5-контакторы, разрывающие цепь и вызывающие остановку лифта при нахождении на определенном этаже
SB2-SB4-кнопки вызова лифта
КМ6-КМ8-контакторы
SB5-SB7-кнопки вызова лифта
КМ9-КМ11-контакторы
SB8-кнопка отмены
КМ14-контактор, разрывающий цепь при открытых дверях или при остановке и запрещающий движение вниз или вверх
КМ12-контактор для сбора схемы для движения вверх
КМ13-контактор для сбора схемы для движения вниз
Заключение
В результате выполнения курсового проекта был выполнен расчёт необходимого асинхронного электродвигателяи по полученным характеристикам подобран оптимальный вариант,был выполнен расчёт преобразователя для выбранного электродвигателяи по полученным характеристикам подобран оптимальный вариант, произведен выбор датчика скорости, относительно выбранного электродвигателя. Была составлена структурная схема системы и была произведена ее настройка на технический оптимум.