Добавлен: 12.01.2024
Просмотров: 148
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
1 Расчет характеристик электродвигателя, построение нагрузочной диаграммы
1.1 Расчет требуемой мощности, момента и частоты вращения электродвигателя
1.2 Построение нагрузочной диаграммы
2 Выбор электродвигателя и проверка его на перегрузку
2.2 Проверка двигателя на перегрузочные нагрузки
6 Разработка структурной схемы системы
6.1 Расчет передаточных функций
6.2 Разработка структурной схемы системы
6.3 Расчет статической ошибки замкнутой системы
7 Настройка системы на технический оптимум
4 Выбор частотного преобразователя
Частотное регулирование позволяет устранить один из существенных недостатков электродвигателей с короткозамкнутым ротором – постоянную частоту вращения ротора электродвигателя, не зависящую от нагрузки. Частотное регулирование создает возможность управления скоростью электродвигателя в соответствии с характером нагрузки. Это в свою очередь позволяет избегать сложных переходных процессов в электрических сетях, обеспечивая работу оборудования в наиболее экономичном режиме.
Частотное регулирование также позволяет улучшить безотказность работы и долговечность технологической системы. Это обеспечивается за счет снижения пусковых токов, устранения перегрузок элементов системы и постепенной выработки моточасов оборудования. Для частотного регулирования используются частотные преобразователи со встроенными в них ПИД-регуляторами (пропорционально-интегрально-дифференциальные регуляторы), обеспечивающими точное регулирование заданных технологических параметров.
Преобразователи частоты, в отличие от других устройств регулирования скорости двигателя, таких как гидравлическая муфта, система генератор-двигатель, механический вариатор, позволяют избегать различных недостатков в работе системы. Речь идет об узком диапазоне регулирования оборудования, сложностях с его эксплуатацией, низким качеством производимых работ и неэкономичности всей системы.
Преобразователи частоты предназначены для регулировки частоты вращения и момента на валу асинхронного или синхронного электродвигателя. Преобразователь частоты – это прибор, предназначенный для преобразования переменного тока (напряжения) одной частоты (обычно частоты питающей сети) в переменный ток (напряжение) другой частоты. Выходная частота в современных инверторах может быть, как ниже, так и выше частоты питающей сети.
Схема любого преобразователя частоты состоит из силовой и управляющей частей. Силовая часть преобразователей выполнена на транзисторах IGBT, работающих в режиме электронных ключей. Схема управления выполняется на цифровых микроконтроллерах и обеспечивает управление силовыми электронными ключами, а также решение большого количества вспомогательных задач (защита, контроль, диагностика). Частотный регулятор имеет структуру с явно выраженным блоком постоянного тока (выпрямитель + фильтр), что проиллюстрировано на рисунках 3 и 4.
В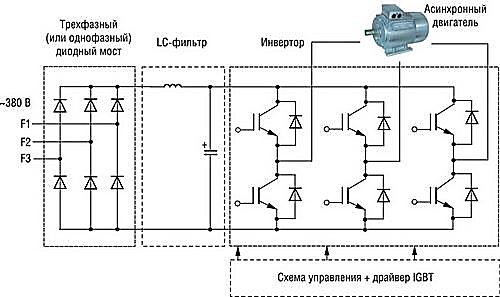
преобразователях этого типа используется двойное преобразование электрической энергии: входное синусоидальное напряжение с постоянной амплитудой и частотой выпрямляется в трехфазном или однофазном выпрямителе, сглаживается LC-фильтром, а затем вновь преобразуется инвертором в переменное напряжение регулируемой частоты и амплитуды.
Рисунок 3- Структурная схема частотных преобразователей со звеном постоянного тока
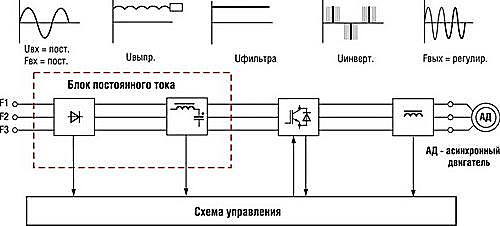
Рисунок 4-Временныедиаграммы работы частотного преобразователя
Преобразователи частоты на транзисторах IGBT по сравнению с тиристорными при одинаковой выходной мощности отличаются меньшими габаритами, сниженной массой и повышенной надежностью в силу модульного исполнения электронных ключей и лучшего отвода тепла с поверхности силового модуля. Они имеют более полную защиту от бросков тока и от перенапряжения, что существенно снижает вероятность повреждений и отказа электропривода.
Согласно выбранному выше двигателю и исходным данным нам необходимо выбрать частотный преобразователь со следующими характеристиками, представленными в таблице А.1.
Таблица 2-Требования для выбора частотного преобразователя
| Тип преобразователя | Векторный |
| Мощность двигателя | 5,5 кВт |
| Номинальный ток двигателя при 220/380 В | 19,4/11,3 А |
| Пусковой ток двигателя | 84,75 А |
| Входное напряжение | 380 В |
| Диапазон регулирования скорости | [6.6-300] рад/с |
| Точность регулирования скорости | 0,05 |
Выберем частотный преобразователь ATV71HU55N4 серии Altivar 71 известной немецкой фирмы Schneider Electric. Преобразователь частоты ALTIVAR 71 (ATV71HU55N4) отвечает самым строгим требованиям применений благодаря использованию разнообразных законов управления двигателем и многочисленным функциональным возможностям. Она адаптирована для решения наиболее сложных задач электропривода - момент и повышенная точность при работе на очень низкой скорости и улучшенные:
динамические характеристики с алгоритмами векторного управления потоком в разомкнутой или замкнутой системе привода;
расширенный диапазон выходной частоты для высокоскоростных двигателей;
параллельное включение двигателей и специальные приводы с использованием скалярного закона управления;
точность поддержания скорости и энергосбережение для разомкнутого привода с синхронным двигателем;
плавное, безударное управление несбалансированными механизмами с помощью системы адаптации мощности (Energy Adaptation System - ENA).
С расширением гаммы сетевого питания до 690 В многофункциональность преобразователя Altivar 71 увеличивает производительность и гибкость использования машин для многочисленных применений в частности при использовании с лифтовыми двигателями:
- Управление тормозом, адаптированное для комфортного движения кабины.
- Обработка сигнала весового датчика.
- Соответствие реле нормам безопасности лифтов EN 81-13-2-2-3.
- Подключение к шине CANopen.
- Управление с контролем исправности выходного контактора.
- Функция эвакуации пассажиров из кабины.
- Управление асинхронными и синхронными двигателями.
- Макроконфигурация “лифт”.
Характеристики altivar 71 представлены в приложении А в таблице А.2.
Также в приложении А в таблицахА.3, А.4 представлены названия и назначения силовых клемм и клемм цепей управления altivar 71 соответственно.[1]
Процесс наладки лифта с ПЧ описан в приложении В.
5 Выбор датчика скорости
Датчик скорости применяется для осуществления отрицательной обратной связи по скорости с целью повышения жесткости механических характеристик электропривода. Он выбирается по величине скорости вращения двигателя, таким образом, чтоб при максимальной скорости вращения якоря двигателя у тахогенератора оставался запас по механической прочности (скорости вращения).
ЭнкодерE40H12-3000-6-L-5 Autonics- преобразуя обороты вала в импульсы, отслеживают положение вращающегося вала. Контроллер может анализировать выходной сигнал энкодера и определять положение и количество оборотов машины. Это позволяет обеспечить высочайшую точность и функциональную гибкость управления работой системы. Высокие механические и электронные рабочие скорости, на которых работают оптические энкодеры позволяют добиться более высокой производительности и точности работы системы, а также уменьшить время цикла и повысить общую эффективность технологического процесса.
Представленные типоразмеры датчиков углового перемещения Autonics позволяют четко определять положение и скорость вращения вала, что в свою очередь обеспечивает максимальную точность управления оборудованием. Энкодер является обратной связью при эффективном управлении приводом.Его характеристики представлены в таблице А.5 приложения А.
При подключении выбранного датчика к частотному преобразователю «Altivar 71» необходимо выбрать дополнительную интерфейсную карту VW3 А3 401, которая устанавливается в специальное посадочное место внутри корпуса ПЧ.
6 Разработка структурной схемы системы
6.1 Расчет передаточных функций
В разрабатываемом электроприводе лифта есть реальная необходимость регулирования только одной координаты – скорости. Это связано с тем, что к скорости, а также её изменению во времени (ускорению), предъявляются жёсткие регламентирующие требования со стороны технологического процесса. Так скорость кабины лифта, а соответственно и двигателя, при пуске должна плавно нарастать до установившегося значения, причём темп её нарастания, определяемый ускорением не должен превышать допустимого значения.Под синтезом системы автоматического управления подразумевается введение обратной связи и расчёт регулятора для управляемой координаты. В нашем случае, будет вводиться отрицательная обратная связь по скорости и регулятор скорости. Для их расчёта необходимо математически описать силовую часть электропривода,
включающую преобразователь, двигатель и механическую часть.
Частотный преобразователь описывается передаточной функцией:
 . (22)
. (22)τ (величина запаздывания) сравнительно мала также, как и постоянная
времени T=2..3τ, поэтому передаточная функция примет вид:
 , (221)
, (221)где коэффициент передачи преобразователя найдем по формуле:
 , (222)
, (222)Теперь найдем передаточную функцию асинхронного двигателя.
Асинхронный двигатель описывается системой уравнений:
 (23)
(23)В данной системе первое уравнение является электромагнитной частью, а второе уравнение механической частью.
По системе (23) получим передаточную функцию электромагнитной части:
 , (24)
, (24)где
 -коэффициент жесткости механической характеристики двигателя;
-коэффициент жесткости механической характеристики двигателя; -электромагнитная постоянная времени.
-электромагнитная постоянная времени. , (241)
, (241)где
 -максимальный момент двигателя;
-максимальный момент двигателя; -номинальная синхронная угловая скорость двигателя
-номинальная синхронная угловая скорость двигателя -критическое скольжение двигателя.
-критическое скольжение двигателя.Таким образом
 .
. , (242)
, (242)где
 -частота питающей сети.
-частота питающей сети. .
.Подставим все найденные значения в формулу (24) и получим:
 .
.Теперь найдем передаточную функцию механической части:

. (25)
Найдем передаточную функцию разомкнутой системы:
 . (26)
. (26)Подставим найденные выше передаточные функции в формулу (26) и получим выражение:
 .
.Теперь найдем передаточную функцию датчика скорости(энкодера).
Передаточная функция энкодера записывается в виде отношения выходного напряжения датчика на номинальную синхронную угловую скорость двигателя.
 (27)
(27)