Добавлен: 12.01.2024
Просмотров: 139
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
1 Расчет характеристик электродвигателя, построение нагрузочной диаграммы
1.1 Расчет требуемой мощности, момента и частоты вращения электродвигателя
1.2 Построение нагрузочной диаграммы
2 Выбор электродвигателя и проверка его на перегрузку
2.2 Проверка двигателя на перегрузочные нагрузки
6 Разработка структурной схемы системы
6.1 Расчет передаточных функций
6.2 Разработка структурной схемы системы
6.3 Расчет статической ошибки замкнутой системы
7 Настройка системы на технический оптимум
Использованные ресурсы
-
Schneider electric, Руководство по установке Altivar 71. Преобразователи частоты для синхронных и асинхронных двигателей, -schneider electric, 2011.-210 с. -
РУСЭЛПРОМ, Технический каталог электродвигателей,2008. -115 с. -
Ильинский Н.Ф. Основы электропривода. Учебник для ВУЗов.-
М.,Энергоатомиздат,2003 г.
-
Справочник по электрическим машинам. Копылов И.П. /1989 /688с. -
Проектирование систем автоматизации технологических процессов: Справочное пособие / А. С. Клюев, Б. В. Глазов, А. Х. Дубровский, А. А. Клюев; Под ред. А. С. Клюева. – 2-еизд., перераб. и доп. – М.: Энергоатомиздат, 1990. – 464 с.: -
М.М. Кацман Справочник по электрическим машинам./2005 г. /480 с. -
Электрический привод. Часть 1. Электроприводы постоянного тока / А.М. Абакумов, П.В. Тулупов, Ю.А. Чабанов/ 2010 г. / 131 с.
Приложения
Приложение А
Таблица А.1-Характеристики двигателя АИР100L2
| Мощность | 5,5 | Pном[кВт] |
| Номинальнаячастотавращения | 3000 | nном[об/мин] |
| Номинальный токпри напряжении220/380В | 19,4 / 11,3 | [A] |
| Номинальныйкрутящиймомент | 18,4 | Mном[Н*м] |
| КПД | 85,7 | η[%] |
| Cos φ(коэффициент мощности) | 0,88 | |
| Соотношение крутящих моментов | 2,2 |  [Н*м] [Н*м] |
| 2,4 |  [Н*м] [Н*м] | |
| 1,6 |  [Н*м] [Н*м] | |
| Кратность пускового тока | 7,5 |  [A] [A] |
| Момент инерции | 0,0080 | Jд[кг*м2] |
| Уровень шума | 80 | [Дб] |
| Скольжение | 4 | sном[%] |
| Класс защиты | IP55 | |
| Вес | 28 | [кг] |
Таблица А.2- Характеристики altivar 71
| Диапазон мощности при частоте сети 50 - 60 Гц (кВт) Однофазная, 100 - 120 В (кВт) Однофазная, 200 - 240 В (кВт) Трехфазная, 200 - 230 В (кВт) Трехфазная, 200 - 240 В (кВт) Трехфазная, 380 - 460 В (кВт) Трехфазная, 380 - 480 В (кВт) Трехфазная, 380 - 500 В (кВт) Трехфазная, 525 - 600 В (кВт) | 0,37 – 500 - 0,37 - 5,5 - 0,37 – 75 - 0,75 - 500 - - | |||
| Электропривод | Выходная частота | 0 - 1000 Гц | ||
| Закон управления | Асинхронный двигатель | Векторное управление потоком в разомкнутой и замкнутой системе, закон напряжение/частота (2 или 5 точек), система адаптации мощности | ||
| Синхронный двигатель | Векторное управление в разомкнутой системе | |||
| Переходный момент | 220 % номинального момента двигателя в течение 2 с, 170 % в течение 60 с | |||
| Функции | Количество функций | > 150 | ||
| Количество предварительно заданных скоростей | 16 | |||
| Количество входов-выходов | 2-4 | 2-4 | ||
| 6-20 | 6-20 | |||
| 1-3 | 1-3 | |||
| 0-8 | 0-8 | |||
| 2-4 | 2-4 | |||
| Коммуникационная связь | Встроенная | Modbus и CANopen | ||
| На заказ | Ethernet TCP/IP, Fipio, Modbus Plus, INTERBUS, Profibus DP, Modbus/Uni-Telway, DeviceNet | |||
| Карты (дополнительные) | Интерфейсные карты импульсного датчика Карты расширения входов/выходов Программируемая карта встроенного контроллера | |||
| Нормы и сертификаты | МЭК/EN 61800-5-1, МЭК/EN 61800-3 (окружающая среда 1 и 2, C1 - C3) EN 55011, EN 55022, МЭК/EN 61000-4-2/4-3/4-4/4-5/4-6/4-11 e, UL, CSA, DNV, C-Tick, NOM 117, ГОСТ | |||
Т
 аблица А.3-Силовые клеммы altivar 71
аблица А.3-Силовые клеммы altivar 71Т


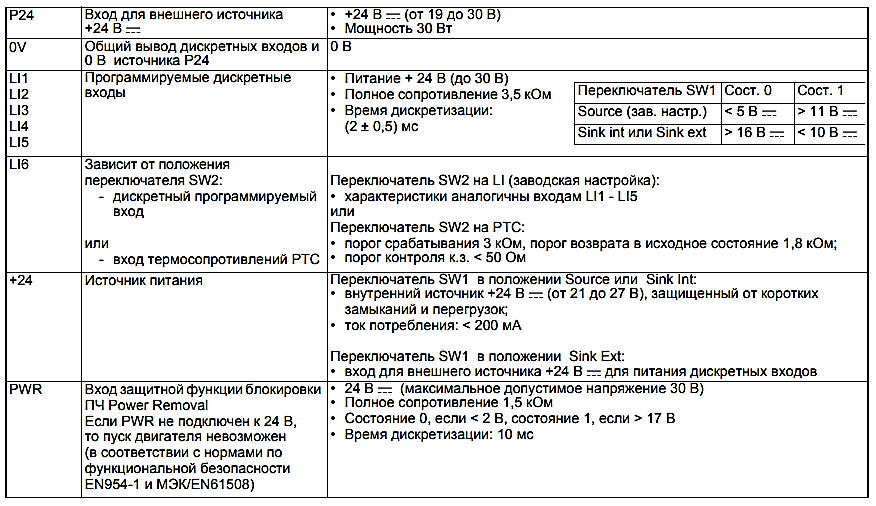
аблица А.4-Клеммы цепей управления altivar 71
Таблица А.5-Характеристики энкодера Autonicks E40H12-3000-6-L-5
| Оптическое разрешение (имп/оборот или имп/дюйм) | 3000 |
| Напряжение питания | 4.75-5.25 В |
| Тип энкодера | инкрементальный, оптический |
| Тип выхода | Line driver |
| Диаметр вала | 12 мм |
| Макс. допустимая частота вращения | 5000 об/мин |
| Выходное напряжение | 2,5 В |
Т
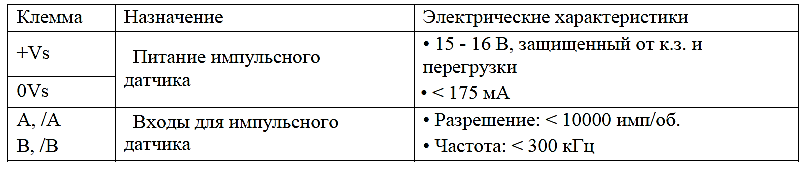
аблица А.6-характеристики доп. Платыaltivar 71 для подключения энкодера
Приложение Б
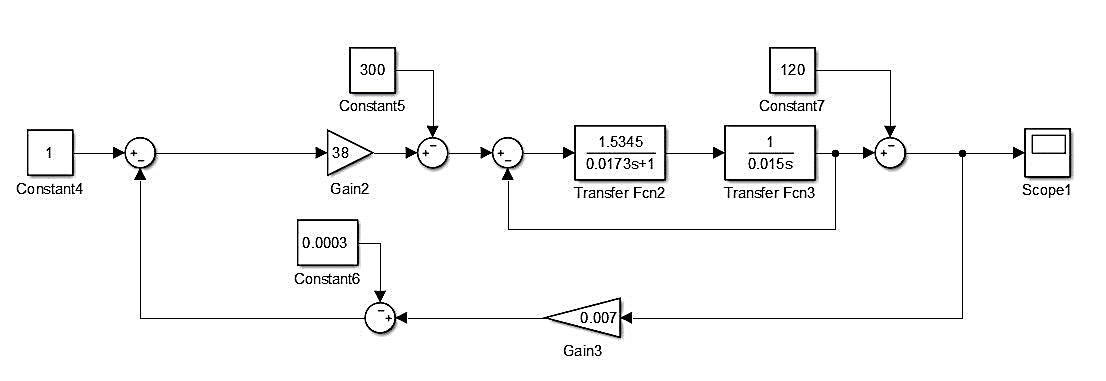
Рисунок Б.1-система до настройки
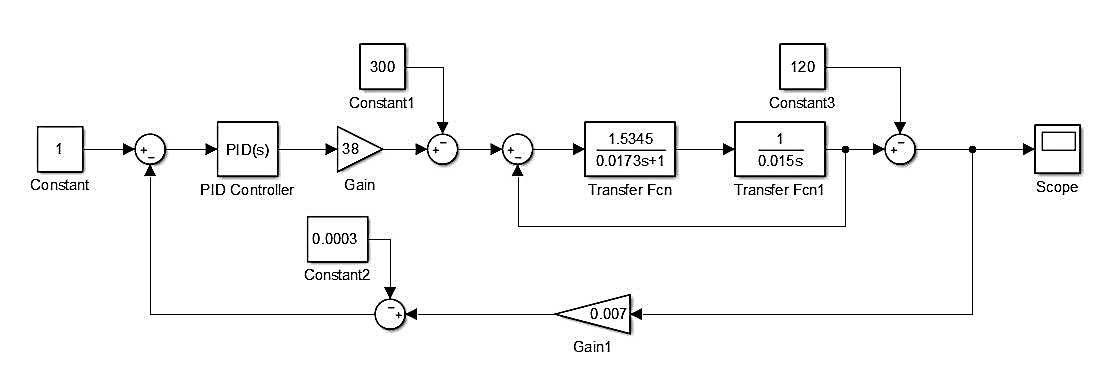
Рисунок Б.2-система после настройки
Приложение В
Процесс наладки лифта с ПЧ состоит из следующих этапов:
-
проверка соединений, установка параметров двигателя и ПЧ и автотюнинг. -
первый пуск на скорости ревизии; -
пуск на большой скорости и подбор времени замедления; -
настройка параметров регулирования; -
настройка времени разгона и получение поэтажного разъезда; -
подбор скорости доводки и получение точных остановок; -
проверка работы лифта и сохранение файла параметров ПЧ.
Программирование ПЧ осуществляется в следующей последовательности:
1) Установите язык общения ENGLISH (EnG), или русский, в 5 разделе меню LANGUAGE (LNG-). При первом включении меню LANGUAGE (LNG-) появляется автоматически через 3с после стартового экрана; после выбора языка будут высвечиваться подразделы DRIVE MENU (Sin, SUP, Set,…drC, Fun,…)
2) Выберите уровень доступа EXPERT (EPr) во 2 разделе меню ACCESS LEVEL (LAC-);
3) Перейдите к разделу 1 DRIVE MENU нажатием кнопки «Вверх»; нажмите кнопку «ENT» для входа в меню;
4) Перейдите к подразделу 1.1 SIMPLY START (Sin-); нажмите кнопку «ENT» для входа в подменю;
Внимание! От правильной установки параметров этого раздела зависит доступность ряда параметров других разделов!
5) проверьте, что параметр 2/3WIRE CONTROL (tCC) установлен на 2-проводное управление 2 WIRE (2C), и измените тип 2-проводного управления с TRANSITION (trn) - «по фронту» на LEVEL (LEL) - «по уровню». Работа по фронту сигнала в системах управления лифтами воспрещается!
6) Перейдите к подразделу MACRO CONFIGURATION (CFG); на дисплее появятся символы START/STOP (STS), соответствующие первичной макроконфигурации (заводским установкам). Нажимая кнопку «Вниз», выберите макроконфигурацию LIFT (LIFt) и нажмите «ENT»;
При этой макроконфигурации автоматически произойдет установка значений некоторых параметров и подключение ряда функций, таких как управление тормозом и выходным контактором, 4 предустановленные скорости, весоизмерение, а также назначение входов/выходов в соответствии с этими функциями.
Доступ к ряду параметров может осуществляться из различных разделов меню, поэтому дальнейший порядок ввода параметров является рекомендательным.
7) Введите номинальные параметры ЭД из меню 1.1 SIMPLY START (Sin-) или из меню 1.4 MOTOR CONTROL (drC-), подраздел ASY-:
8) Настройте кривую движения в меню 1.7. APPLICATION FUNCTIONS, (Fun-) подраздел RAMP (rPt-), такжедоступноизменю 1.3 – SETTINGS (SEt-)
9) Проверьте правильность установки параметров
«Тип останова мотора» STOP CONFIGURATION (Stt-) – значение параметра TYPE OF STOP (Stt) должно быть RAMP STOP (rПР), и
«Автоматическое DC-торможение» - AUTO DC INJECTION (AdC-) - значение параметра Auto DC injection (AdC) должно быть nO - отключено
10) Введите номера логических входов, назначенных на задание 4 скоростей и уставки скоростей доводки, ревизии и номинальной скорости в меню 1.7. APPLICATION FUNCTIONS, (Fun-), подраздел PRESET SPEEDS (PSS-) или из меню 1.3 – SETTINGS, а также значения коэффициентов регулирования FLG и SIT:
Меню 1.3 – SETTINGS (Set-)
11) В меню 1.7. APPLICATION FUNCTIONS, (Fun-), подраздел OUTPUT CONTACTOR CMD (OCC-) назначьте логический выход DO1 на управление выходным контактором, для чего установите параметр ОСС = dO1 (заводская уставка – NO). Времена задержки срабатывания выхода изменять не требуется
12) Настройте логику работы при неисправностях в меню 1.8 – FAULT MANAGEMENT (FLt-)
Необходимо установить параметры:
(Atr-) авторестарт – параметр Atr = YES
(tHt-) тип тепловой защиты – параметр tHt = FCL
(OPL-) – обрыв выходной фазы – параметр OPL = YES
Значения остальных параметров соответствуют заводским уставкам.
5. Окончательная настройка ПЧ
5.1. Автотюнинг
После установки параметров перейдите в DRIVE MENU к подразделу (tUn-) – автоподстройка.
После ввода всех параметров необходимо выполнить автоподстройку ПЧ к двигателю (автотюнинг), для чего в DRIVE MENU выбрать параметр “(tUn-) и нажать [ENT], значение параметра обычно “NO”; нажать «Вниз», появится значение “YES”.
Убедиться в отсутствии команды вращения. Затем подключить электродвигатель к выходу ПЧ (включить или нажать пускатель КМ7, предварительно отключив реле К1 во избежание отключения автоматического выключателя QF1).
Нажать [ENT] на пульте ПЧ; начнется тест двигателя (может сопровождаться звуками различной тональности) по окончании теста на дисплее ПЧ появится значение “DONE” – выполнено. При возникновении ошибок в процессе автотюнинга проверьте подключение электродвигателя к ПЧ или см. руководство по программированию ПЧ.