Добавлен: 08.11.2023
Просмотров: 1463
Скачиваний: 6
СОДЕРЖАНИЕ
Проблема охраны территорий от малогабаритных БПЛА
Обзор известных методов решения проблемы
Постановка задачи проектирования системы управления охранного квадрокоптера
Характеристики центрального процессора (CPU)
Барометрический датчик давления
Электронный регулятор скорости (ESC)
Принцип работы датчика с оптическим потоком
Результат сборки квадрокоптера
Программная среда Robot Operating System
Алгоритм управления автономным полетом охранного квадрокоптера
Финансовый менеджмент, ресурсоэффективность и ресурсосбережение
Продолжительность этапов работ
Расчет сметы затрат на выполнение проекта
Расчет затрат на электроэнергию
Расчет затрат на социальный налог
Расчет прочих (накладных) расходов
Безопасность в чрезвычайных ситуациях
Особенности законодательного регулирования проектных решений
Список используемых источников
На рисунке 2.12 показана структура аккумуляторной батареи.

Рисунок 2.12 – Структура аккумуляторной батареи
Величина токоотдачи является важным показателем при выборе аккумуляторной батареи для квадрокоптера. Она показывает допустимую скорость разряда аккумулятора.
Емкость литий-полимерных батарей определяется током, который способен разрядить батарею за один час.
 Для выбора батареи необходимо произвести расчет. Так как максимальный ток двигателей равен 12 А, то суммарное потребление четырех двигателей будет равным 48 А, следовательно, выходной ток батареи должен быть не менее 55 А согласно [10]. Выберем батарею 3S 14,8В 5000мАч 40C показанную на рисунке 2.13. Выходной ток батареи получаем умножением емкости батареи, выраженной в Ач, на числовой коэффициент токоотдачи С. В результате получим выходной ток 200 А, что обеспечивает большой запас по токоотдачи. Вес данной батареи равен 370 граммам.
Для выбора батареи необходимо произвести расчет. Так как максимальный ток двигателей равен 12 А, то суммарное потребление четырех двигателей будет равным 48 А, следовательно, выходной ток батареи должен быть не менее 55 А согласно [10]. Выберем батарею 3S 14,8В 5000мАч 40C показанную на рисунке 2.13. Выходной ток батареи получаем умножением емкости батареи, выраженной в Ач, на числовой коэффициент токоотдачи С. В результате получим выходной ток 200 А, что обеспечивает большой запас по токоотдачи. Вес данной батареи равен 370 граммам.Рисунок 2.13 – АКБ 3S 14,8В 5000мАч 40C
- 1 ... 6 7 8 9 10 11 12 13 ... 35
Выбор пропеллеров
У пропеллеров есть две ключевые характеристики: длина и высота. Длина измеряется от наконечника до кончика, а шаг обозначает продвигающееся расстояние за один оборот. Большая длина создает высокую тягу, но медленна в ответ из-за большей инерции, в то время как большой шаг обеспечивает большое ускорение, но может создать турбулентность. Другие факторы, такие как материал, вес, номер ножа, мощность двигателя, длина и шаг вместе определяют стабильность.
Как правило, двигатель с номиналом kV 900-1000 может управлять пропеллером 10 дюймов в длину и шагом от 4,5 до 6 дюймов.
Существуют следующие виды лопастей: [11]
-
Normal (N) – Заострённые на концах лезвия. Уменьшается тяга и снижает расход энергии аккумулятора -
Bullnose (BN) – Бычий нос (Закруглённые). При равном с N в диаметре, имеют большую тягу и площадь. За счёт тяжести ведут себя более стабильно, и увеличивают отзывчивость дрона по рысканью. Сильно повышают расход энергии АКБ. -
Hybrid Bullnose (HBN) – промежуточный вариант. Имеют, как и преимущества, так и недостатки предыдущих.
Выберем пропеллеры типа N показанный на рисунке 2.14.

Рисунок 2.14 – Пропеллеры N
типа
-
PX4Flow
Компьютерное зрение представляет собой привлекательную сенсорную опцию для применений в БПЛА. Оптический сигнал может быть измерен путем отслеживания воспринимаемого движения точек объекта между последовательными кадрами изображения. Это воспринимаемое движение объектов дает информацию о движении транспортного средства через окружающую среду.
Так как GPS сигнал не работает в помещении, такая технология позволит охранному квадрокоптеру ориентироваться в пространстве. Полетный контроллер Pixhawk, после необходимой настройки и калибровки данного модуля, будет обрабатывать сигнал модуля и по средствам MAVLink протокола рассылать данные локальной позиции (глобальная позиция определяется GPS сигналом).
PX4Flow – представляет собой специализированный модуль камеры с высоким разрешением направленный вниз и с 3-осевым гироскопом, который использует наземную текстуру и видимые функции для определения скорости движения летающего аппарата. [12] Хотя датчик может поставляться со встроенным гидроакустическим датчиком Maxbotix LZ-EZ4 для измерения высоты, он не был достаточно надежным на различных поверхностях при испытаниях, поэтому его показания не используются. В отличие от многих оптических датчиков, он также работает в закрытом помещении и в условиях низкой освещенности, не требуя освещения. Он может быть свободно перепрограммирован для выполнения любой другой базовой, эффективной низкоуровневой задачи компьютерного видения. На рисунке 2.15 изображен оптический датчик PX4Flow.

Рисунок 2.15 – Оптический датчик PX4Flow
Датчик подключается к полетному контроллеру через интерфейс I2C. На рисунке 2.16 показан способ подключения датчика к полетному контроллеру.
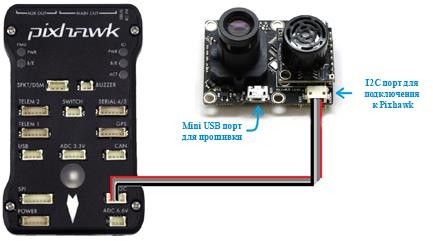
Рисунок 2.16 – Подключение датчика PX4Flow к Pixhawk
- 1 ... 7 8 9 10 11 12 13 14 ... 35
Принцип работы датчика с оптическим потоком
Оптическое измерение представляет собой сумму продольных и поперечных смещений. Когда БПЛА движется параллельно поверхности земли, наблюдаемые объекты будут смещаться в поле зрения. Подобный эффект существует, когда тело БПЛА наклонено. Это верно, даже если БПЛА не имеет поступательного движения относительно навигационной рамки. Можно выразить оптический поток как комбинацию скорости трансляции,
скорости вращения и расстояния от БПЛА до поверхности земли. Рассмотрим упрощенную двумерную оптическую модель, где влияние вертикального движения БПЛА считается тривиальным.
Это разумно, если предположить, что БПЛА находится над гладкой поверхностью земли на определенной высоте и предполагает отсутствие высоких динамических маневров. Модель может быть выражена как:
????
???????? = ???????? + ????????,
???? = ???????? + ???? .
у ???? ????
Где Qx, Qy - оптические измерения. Vx, Vy, - скорости смещения UAV вдоль оси X и Y; ????????, ????????- угловые скорости вращения БПЛА. H - высота над землей, которая измеряется от камеры до поверхности земли.
Задача определения положения по оптическому потоку заключается в
определении отслеживаемых точек с кадра. После определения точек потребуется отследить их в течение всего времени полета беспилотного летательного аппарата, так как он будет непрерывно передавать изображения