Файл: Минобрнауки россии федеральное государственное бюджетное образовательное учреждение высшего образования Балтийский государственный технический университет военмех.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 06.11.2023
Просмотров: 172
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
Решение обратной задачи кинематики с помощью матрицы Якоби
Построение траектории движения схвата манипулятора на заданном участке
Расчёт механической части мехатронного модуля робота
Расчёт второго планетарного редуктора
Проверка рассчитанного механического преобразователя
Выделим наиболее важные элементы конструктивного облика и особенности создания и эксплуатации многофункциональных наращиваемых космических систем, в том числе не имеющих аналогов и прототипов:
-
значительные масса и габариты конструкции; -
модульный принцип построения, реконфигурируемость; -
ограничение функциональности модулей; -
использование как герметичных, так и негерметичных модулей; -
формирование окончательного облика системы в течение некоторого времени в соответствии с заранее разработанной стратегией; -
широкое использование трансформируемых элементов; -
поддержание работоспособности и изменение (расширение) функциональности за счет регулярного сервисного обслуживания, в частности, путем замены унифицированных блоков.
При непосредственной стыковке с помощью стыковочного устройства средствами систем управления поступательным движением и ориентацией стыкуемых объектов на момент касания должны быть обеспечены требуемые начальные условия стыковки (взаимное положение и относительные линейная и угловая скорости). После касания стыковочное устройство последовательно обеспечивает амортизацию, компенсацию начального промаха, сцепку (образование первичной связи), выравнивание, стягивание, совмещение стыка с окончательным выравниванием, жесткое соединение. При этом требования к стыку могут предъявляться по точности, жесткости, прочности, герметичности.
Стремление к расширению возможностей робототехнической космической системы ведет к ее усложнению и удорожанию, а ограничение функциональности, обусловленное требованиями надежности, не всегда желательно с точки зрения космических условий применения. Могут быть названы следующие тенденции развития средств космической робототехники:
1. Совершенствование отработанных прототипов в направлении расширения функциональных возможностей системы без принципиальных изменений конструкции. Примером может служить разработка манипулятора «Canadarm–2» (Space Station Remote Manipulator System – SSRMS) на базе манипулятора «Canadarm» (Shuttle Remote Manipulator System – SRMS).
2. Разработка для решения широкого круга разнородных задач взаимосвязанной совокупности средств космической робототехники, предполагающих модульность и реконфигурируемость. Иллюстрацией данного подхода может служить использование совместно с «Canadarm» специально разработанного удлинителя Ispection Boomand Laser Camera System для инспекции состояния теплозащитного покрытия шаттлов. Необходимо также выделить концепцию построения на МКС мобильной системы обслуживания (Mobile Servicing System – MSS).
3. Согласованное проектирование обслуживаемых космических объектов и обслуживающих робототехнических средств. В качестве одного из примеров можно назвать оснащение космических объектов манипуляторами, имеющими фиксированное расположение и предназначенными для обслуживания некоторой рабочей зоны (оснащение шаттлов манипуляторами «Canadarm», японского модуля МКС Kibo системой манипуляторов JEMRMS) Примерами специально созданной для обеспечения робототехнического обслуживания космических объектов инфраструктуры могут быть упомянутый рельсовый путь для перемещения в пределах МКС мобильного транспортера; расположенные в различных точках станции узлы PDRF (Power Data Grappe Fixture), обеспечивающие интерфейсы электропитания, управления и передачи видеоинформации, которые могут использоваться для крепления основания как манипулятора «Canadarm–2», так и манипулятора «Dextre»; концепция On-orbit Replaceable Unit (ORU), предполагающая оснащение заменяемых функциональных блоков соответствующими специализированными интерфейсами.
4. Дальнейшее развитие «антропоморфного подхода», предполагающего увеличение кинематического подобия робототехнических средств организму человека для обеспечения сходной функциональности и облегчения воспроизведения роботом физиологически естественных для человека движений («Robonaut»). В случае невозможности согласованного проектирования весьма вероятна потребность в специфических устройствах космической робототехники. В частности: - необходима разработка универсальных захватных устройств для не оснащенных захватными интерфейсами объектов; - необходимо расширение диапазона начальных условий стыковки для объектов, движущихся произвольно [2].
Задачи космической робототехники можно разделить на три группы:
-
Задачи, успешно решенные на сегодняшний день с использованием отработанных в орбитальных условиях средств космической робототехники. -
Задачи, решаемые сегодня с использованием отрабатываемых, в том числе, в орбитальных условиях средств робототехники. -
Перспективные задачи, следующие из логики развития космической техники, определяющие пути ее дальнейшего развития и требующие разработки и создания новыхсредств космической робототехники.
Далее уделим пристальное внимание первой группе задач, а также рассмотрим способы их решения. К ним можно отнести:
-
Захват и транспортировку свободнолетящих объектов в непосредственной близости от космического аппарата; -
Перемещение и позиционирование объектов в открытом космосе; -
Выполнение монтажа объектов в открытом космосе; -
Стыковка объектов.
Эти задачи успешно решаются уже использующимися манипуляторами. Рассмотрим наиболее популярные модели: Canadarm, Canadarm-2, манипулятор комплекса «Буран» [3].
Canadarm – роботизированные манипуляторы первого поколения, созданные Канадским космическим агентством. Использовались на шаттлах для перемещения грузов в космосе. Всего было построено 5 таких манипуляторов.

Рисунок 1 — Космический манипулятор Canadarm
Манипулятор располагался в грузовом отсеке шаттла, управление осуществлялось дистанционно из кабины. Имеет 6 степеней свободы. Механизм захвата по принципу работы напоминает диафрагму фотоаппарата.
Характеристики:
-
Длина — 15,2 м (50 футов); -
Диаметр — 38 см (15 дюймов); -
Собственный вес — 410 кг (900 фунтов); -
Вес в составе общей системы — 450 кг (990 фунтов).
Впервые Canadarm использовался на борту шаттла Колумбия в ходе миссии STS-2 в 1981 году. За время эксплуатации манипулятор Канадарм участвовал в 50 миссиях и совершил 7000 оборотов вокруг Земли, отработав без единого отказа. Манипулятор использовался для захвата телескопа Хаббл, перемещения и выгрузки более 200 тонн компонентов МКС и перемещения астронавтов.
При сборке МКС Canadarm применялся много раз, начиная с миссии STS-88, во время которой были соединены два первых модуля — «Заря» и «Юнити».
Canadarm – 2 – передвижная обслуживающая система (робототехнический комплекс и связанное с ним оборудование), находящаяся на Международной космической станции. Выполняет ключевую роль при сборке и обслуживании станции: перемещает оборудование и материалы в пределах станции, помогает космонавтам работать в открытом космосе и обслуживает инструменты и другую полезную нагрузку, находящиеся на поверхности станции.
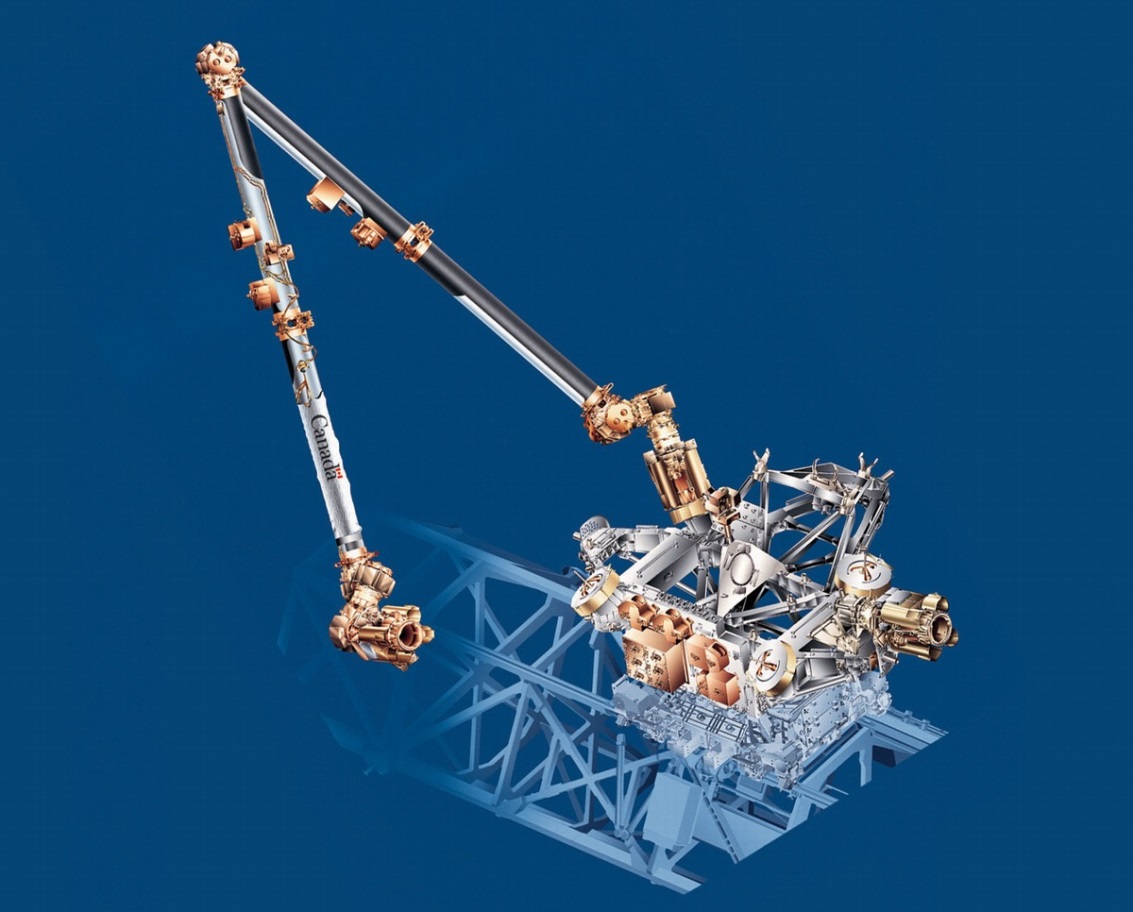
Рисунок 2— Космический манипулятор Canadarm–2
В передвижную обслуживающую систему входит рука, называемая Space Station Remote Manipulator (SSRMS), в переводе на русский — «дистанционный манипулятор космической станции», Mobile Remote Servicer Base System, а также Special Purpose Dexterous Manipulator («Гибкий манипулятор специального назначения»), известный также как Декстр. Система может перемещаться по рельсам, расположенным на ферменных конструкциях с помощью тележки транспортёра.
Передвижная обслуживающая система спроектирована и изготовлена компанией MDA Space Missions (ранее называемой MD Robotics, а ещё ранее SPAR Aerospace) как вклад Канадского космического агентства в МКС.
Манипулятор для космического корабля "Буран" (СБМ) был разработан в Государственном научном центре - Центральном научно-исследовательском и опытно-конструкторском институте робототехники и технической кибернетики (ГНЦ ЦНИИ РТК РФ) (Санкт-Петербург). На "Буране" в штатных полетах предполагалось использовать до двух одинаковых манипулятора.
Бурановский манипулятор имеет сходную с RMS (манипулятор SpaceShuttle) кинематическую схему. Он состоит из шести вращательных степеней подвижности и имеет одну транспортную степень (для начальной установки в грузовом отсеке корабля). Звенья манипулятора изготовлены из углепластика. Работа с манипулятором возможна в автоматическом и ручном режимах управления [4].
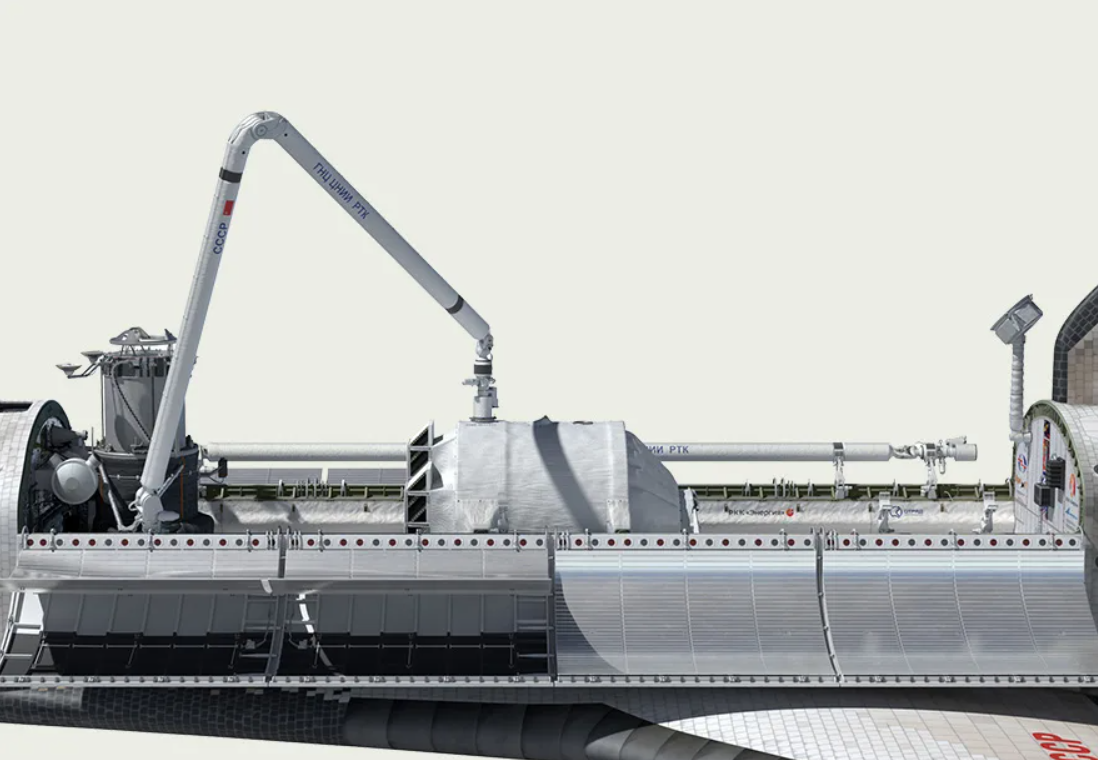
Рисунок 3 — Бортовой манипулятор ОКР «Буран»
Технические характеристики:
-
Число степеней свободы:6 вращательных (6В); -
Грузоподъемность: 30 т; -
Рабочая зона: сфера радиусом 15.5 м; -
Максимальная скорость: 30 см/сек (без груза); -
10 см/сек (с грузом); -
Точность позиционирования: 3 см.
Таким образом, основываясь на имеющихся данных, а также проведя анализ уже существующих аналогов, сформируем задачи для ВКР [5], [6].
В данной ВКР будут решаться следующие задачи:
-
Формирование кинематической схемы манипулятора и составление параметров Денавита-Хартенберга; -
Решение прямой и обратной задач кинематики для исполнительного устройства манипулятора; -
Нахождение матрицы Якоби и вычисление якобиана в конкретном положении исполнительного устройства манипулятора; -
Построение траектории движения манипулятора; -
Нахождение ошибки манипулятора с помощью матрицы Якоби; -
Подбор электродвигателя для одного мехатронного модуля; -
Проектировочный расчёт редуктора для мехатронного модуля.
-
Разработка кинематической структуры и решение задач кинематики робота
Разрабатываемый сервисный манипулятор космического назначения должен будет выполнять следующие задачи:
1. Захват и транспортировку свободнолетящих объектов в непосредственной близости от космического аппарата;
2. Перемещение и позиционирование объектов в открытом космосе:
-
Максимальный размер объекта: куб с гранью 1 м; -
Максимальная масса объекта: 7,5 тонн; -
Максимальное ускорение:0,15 м/с2; -
Максимальная скорость: 0,2 м/с; -
Тип исполнительного устройства — модульный.
- 1 2 3 4 5 6 7 8 9 10