Файл: Минобрнауки россии федеральное государственное бюджетное образовательное учреждение высшего образования Балтийский государственный технический университет военмех.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 06.11.2023
Просмотров: 170
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
Решение обратной задачи кинематики с помощью матрицы Якоби
Построение траектории движения схвата манипулятора на заданном участке
Расчёт механической части мехатронного модуля робота
Расчёт второго планетарного редуктора
Проверка рассчитанного механического преобразователя
Функциональная схема РТК
Прежде всего, в процессе создания робота-манипулятора необходимо разработать функциональную схему робототехнического устройства [7]. Данная схема представлена на рисунке 4.
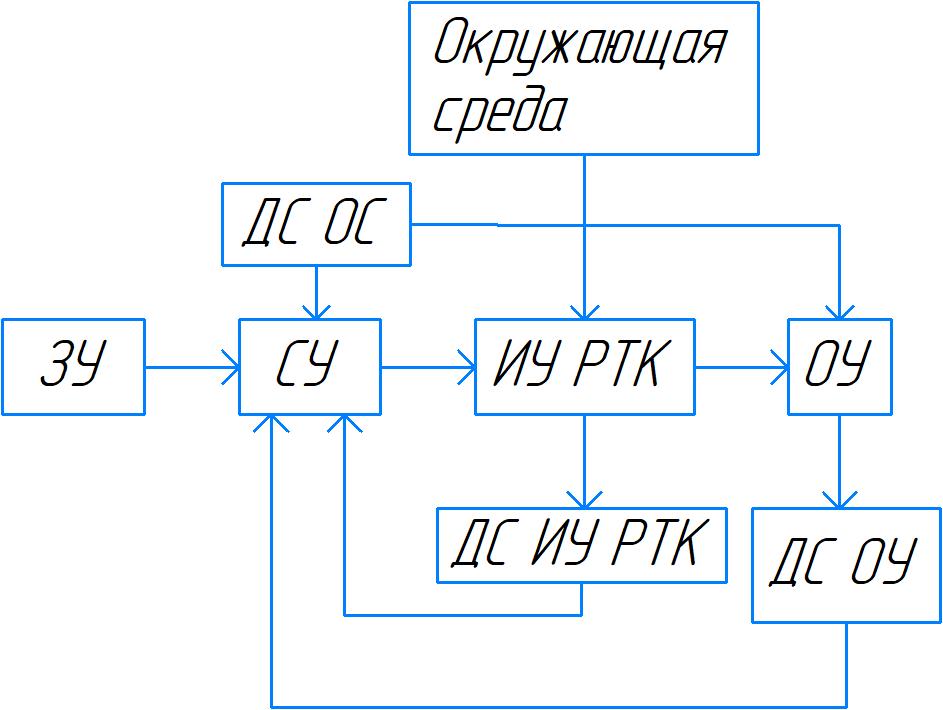
Рисунок 4 —Функциональная схема робототехнического устройства
Где:
ЗУ – задающее устройство;
СУ – система управления;
ИУ РТК – исполнительное устройство робототехнического комплекса (манипулятор);
ОУ – объект управления;
ДСИУ РТК – датчики состояния исполнительного устройства;
ДС ОС – датчики состояния окружающей среды;
ДСОУ – датчики состояния объекта управления.
-
Кинематическая схема ИУ РТК
Структурный анализ выполняется по формуле Малышева:
 (1)
(1)
Где:
т– число подвижных звеньев;
i–Класс кинематической пары;
Pi – Число кинематических пар i-го класса
j– номер замкнутого контура;
 – число избыточных связей замкнутого контура
– число избыточных связей замкнутого контура (2)
(2)

Основные параметры манипулятора приведены в таблицах 1-3.
Таблица 1 — Параметры исполнительного устройства
| Параметры ИУ | Значения |
| Степень подвижности | W=6 |
| Число замкнутых контуров | 0 |
Примечание: на данном этапе в качестве звеньев принимаем эквивалентные им металлические балки с сечением в виде кольца - трубки.
Таблица 2 – длины звеньев манипулятора, мм
| L1 | L2 | L3 | L 4 | L 5 | L 6 |
| 300 | 3000 | 3000 | 700 | 700 | 500 |
Разработку исполнительного органа следует начинать с синтеза кинематической схемы.
Исполнительное устройство сервисного робота-манипулятора космического назначения имеет кинематическую схему, состоящую из 6 звеньев с вращательными кинематическими парами 5-ого класса. Данная схема представлена на рисунке 5.
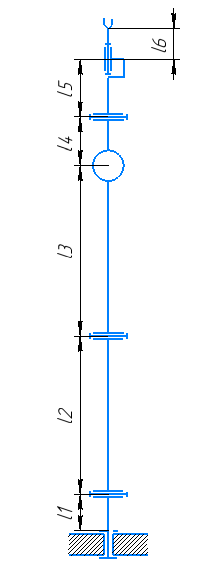
Рисунок 5 — Кинематическая схема исполнительного устройства
-
Решение прямой задачи кинематики
Обратная задача кинематики заключается в расчете обобщенных координат при заданных линейных и угловых координатах рабочего органа манипулятора.
Прямая задача кинематики решается определением параметров Денавита-Хартенберга и последующим вычислением матрицы инструмента для определения положения схвата [8].
Для решения прямой задачи кинематики сформируем параметры Денавита-Хартенберга, внеся их в таблицу 4:
Таблица 3 – параметры Денавита-Хартенберга манипулятора
| | θ | α | d | a |
| 1 |  |  | 0 | l1 |
| 2 |  | 0 | l2 | 0 |
| 3 |  |  | l3 | 0 |
| 4 |  | | l4 | 0 |
| 5 |  | | 0 | 0 |
| 6 |  | 0 | 0 | l5+l6 |
Где
 – обобщенные координаты:
– обобщенные координаты: – угол поворота звена 1 относительно оси
– угол поворота звена 1 относительно оси  ;
; – угол поворота звена 2 относительно оси
– угол поворота звена 2 относительно оси  ;
; – угол поворота звена 3 относительно оси
– угол поворота звена 3 относительно оси  ;
; – угол поворота звена 4 относительно оси
– угол поворота звена 4 относительно оси  ;
; – угол поворота звена 5 относительно оси
– угол поворота звена 5 относительно оси  ;
; – угол поворота инструмента относительно оси
– угол поворота инструмента относительно оси  .
.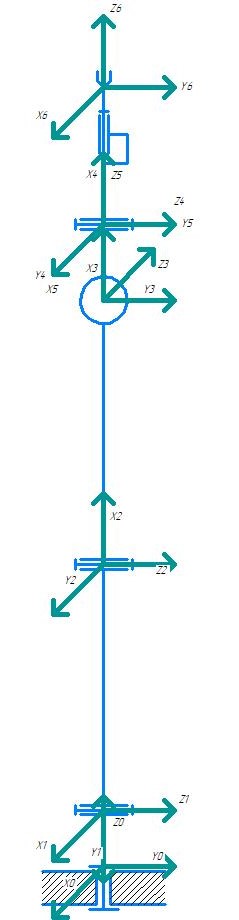
Рисунок 6 — Параметры Денавита-Хартенберга исполнительного устройства
Для дальнейшего проектирования необходимо решить прямую и обратную задачи кинематики.
Для расчета матрицы инструмента определим последовательность согласованных систем координат.
Составим расширенные однородные матрицы преобразований в системе координат присоединенных звеньев робота
 .
.Матрица преобразования для 1-го звена имеет вид:
Для 2-ого звена:
Для 3-го звена:
Для 4-го звена:
Для 5-го звена:
Для 6-го звена:
Матрица инструмента представляет собой произведение последовательности однородных матриц преобразования
 и имеет вид:
и имеет вид: 

 (3)
(3)Проверим правильность синтеза матрицы инструмента, используя программный код в Matlab [9]. Результат работы программы:
T1 =
1 0 0 0
0 1 0 0
0 0 1 300
0 0 0 1
T2 =
1 0 0 0
0 1 0 0
0 0 1 3000
0 0 0 1
T3 =
1 0 0 0
0 1 0 0
0 0 1 3000
0 0 0 1
T4 =
1 0 0 0
0 1 0 0
0 0 1 700
0 0 0 1
T5 =
1 0 0 0
0 1 0 0
0 0 1 700
0 0 0 1
T6 =
0 -1 0 0
0 0 0 0
0 0 1 500
0 0 0 1
Рисунок 5 – Заданное положение ИУ РТК
Программный код представлен в приложении А.
Положение схвата в начальной системе координат
 определяется следующим выражением:
определяется следующим выражением: (4)
(4) где
 – координаты схвата в СК
– координаты схвата в СК  .
. (5)
(5)где
 – длина 6 звена.
– длина 6 звена.Реализация в Matlab представлена в Приложении Б.
Зададим начальное положение манипулятора:
При
 :
:T =
[-1, 0, 0, -3000]
[ 0, -1, 0, 3700]
[ 0, 0, 1, 1500]
[ 0, 0, 0, 1]
p =
-3000
3700
1500
1
Зададим случайное положение манипулятора:
При
 :
: T =
[0.0002 0.0007 0.0006 -3.1103]3
[-0.0003 -0.0006 0.0008 2.5725]3
[0.0009 -0.0004 0.0001 3.1973]3
[0, 0, 0, 1]
p =
-3.11033
2.57253
3.19733
1
Таким образом, решена прямая задача кинематики для ИУ робота.
- 1 2 3 4 5 6 7 8 9 10
Решение обратной задачи кинематики с помощью матрицы Якоби
-
Определение матрицы Якоби
Следующим этапом является решение обратной задачи кинематики.
Положение схвата манипулятора относительно начальной системы координат однозначно определяется его обобщенными координатами, а именно [10]:
 (6)
(6)Где:
 – вектор абсолютных координат;
– вектор абсолютных координат; - вектор обобщенных координат манипулятора.
- вектор обобщенных координат манипулятора.Продифференцировав
получим: (7)
(7)Где:
 – агрегированный вектор линейных и угловых скоростей рабочего органа;
– агрегированный вектор линейных и угловых скоростей рабочего органа; – матрица Якоби, которая имеет следующий вид:
– матрица Якоби, которая имеет следующий вид: (8)
(8)Таким образом, выражение (7) принимает следующий вид:
 (9)
(9)Произведем синтез матрицы Якоби [11]:
Векторы угловых скоростей:





 (10)
(10)Где:
 –угол вращения;
–угол вращения;е–ось вращения.