Файл: Минобрнауки россии федеральное государственное бюджетное образовательное учреждение высшего образования Балтийский государственный технический университет военмех.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 06.11.2023
Просмотров: 171
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
Решение обратной задачи кинематики с помощью матрицы Якоби
Построение траектории движения схвата манипулятора на заданном участке
Расчёт механической части мехатронного модуля робота
Расчёт второго планетарного редуктора
Проверка рассчитанного механического преобразователя
Приведенный момент инерции нагрузки;
 КПД комбинированного редуктора;
КПД комбинированного редуктора;
 - Момент инерции звена;
- Момент инерции звена;
К = 2 - Коэффициент, учитывающий неизвестные моменты инерции звена;
 КПД волновой передачи, принимаемый 0,8;
КПД волновой передачи, принимаемый 0,8;
 КПД планетарного механизма, принимаемый 0,8;
КПД планетарного механизма, принимаемый 0,8;
 КПД подшипников качения на валу, принимаемый 0,99;
КПД подшипников качения на валу, принимаемый 0,99;

Был выбран BLDC-108 – бесконтактный двигатель постоянного тока с возбуждением от постоянных магнитов (неодим-железо-бор). Определение положения ротора в любой момент времени обеспечивают 3 датчика Холла (для сенсорных контроллеров управления). Для контроля над перегревом, установлены датчики температуры.

Рисунок 14 – двигатель BLDC-108
Характеристики двигателя представлены в таблице:
Таблица 6 – характеристики двигателя
Габаритные размеры двигателя представлены на рисунке
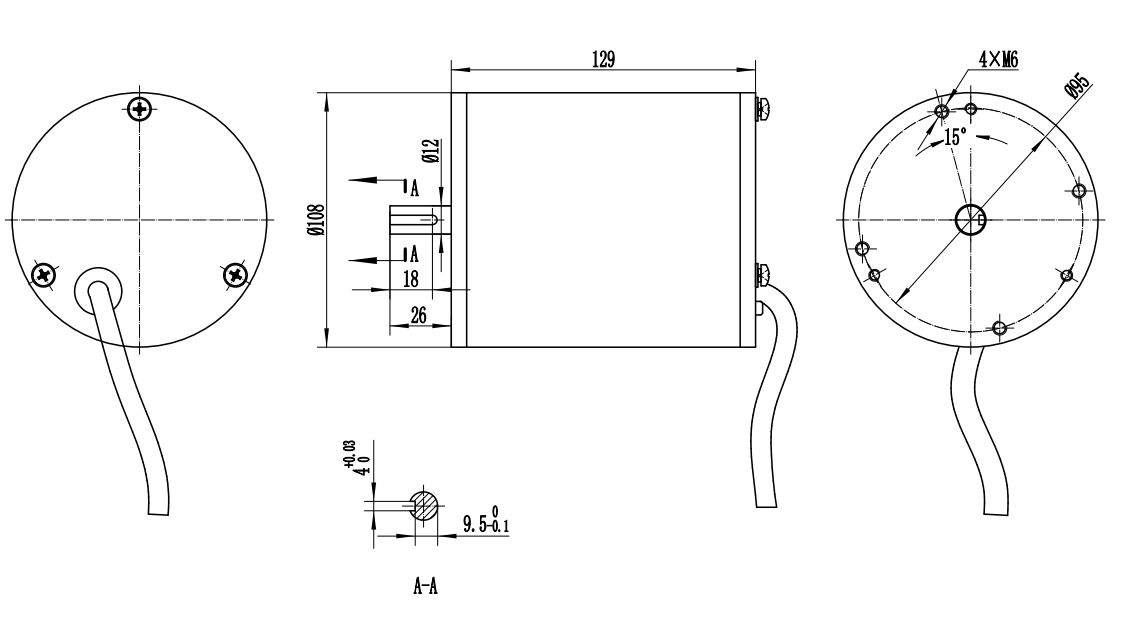
Рисунок 15 – Габаритные размеры двигателя BLDC-108
Контроллер, используемый с данным двигателем - BAC-0501:

Рисунок 16 – Универсальный внешний контроллер BAC-0501
Определим требуемое передаточное отношение:
 (33)
(33)
В качестве механического преобразователя будем использовать связку из двух планетарных редукторов с и волнового редуктора с
и волнового редуктора с .
.
Произведем расчет первого планетарного редуктора для привода 5 звена:
Передаточное отношение двух ступеней «a-g», «g-b»:
 (34)
(34)
 (35)
(35)
Число зубьев шестерни из условия прочности:
 (36)
(36)
Где
 (37)
(37)
тогда
 (38)
(38)
Расчет зубьев сателлита «g» и внутреннего колеса «b».
Число зубьев «b»:
 (39)
(39)
Число зубьев «g»:
 (40)
(40)
Проверим передаточное отношение планетарного механизма:
 (41)
(41)
Проверка условия сборки колес:
 (42)
(42)
 – число сателлитов (2…5)
– число сателлитов (2…5)
Так как было получено целое число, то условие выполняется. Следовательно, принимаем и
и  .
.
Определим минимальные диаметры шестерни:
По условию обеспечения контактной прочности зуба:
 (43)
(43)
Где:
 – предел прочности выбранной стали 45 В48, равное 480 Мпа;
– предел прочности выбранной стали 45 В48, равное 480 Мпа;
 коэффициент наклона зубьев;
коэффициент наклона зубьев;
 – коэффициент ширины зубчатого венца шестерни.
– коэффициент ширины зубчатого венца шестерни.
 (44)
(44)
По условию обеспечения прочности зубьев при изгибе:
Согласно ГОСТ 6636-69 «ОСНОВНЫЕ НОРМЫ ВЗАИМОЗАМЕНЯЕМОСТИ. НОРМАЛЬНЫЕ ЛИНЕЙНЫЕ РАЗМЕРЫ» [13] выбираем из стандартного ряда Ra40:


Определим модуль:
 (45)
(45)
Определим диаметр делительной окружности колеса «а»
где dдв – диаметр посадочной части вала двигателя

Для собираемости вала и шестерни назначаем
Рассчитаем модуль:
 (46)
(46)
По ГОСТ 9563–60 [14] берем модуль .
.
Для ,  имеем:
имеем:
Диаметры делительных окружностей:
 (47)
(47)
 (48)
(48)
 (49)
(49)
Диаметры начальных окружностей:
 (50)
(50)
 (51)
(51)
 (52)
(52)
Межосевое расстояние зубчатых колес:
 (53)
(53)
Ширина зубчатого венца:
 (54)
(54)
По ГОСТ 6636–69 принимаем равным 5,3 .
.
 (55)
(55)
По ГОСТ 6636–69 принимаем равным 8,0 мм.
Диаметр окружности вершин:
 (56)
(56)

(57)
 (58)
(58)
Диаметры окружности впадин:
 (59)
(59)
 (60)
(60)
 (61)
(61)
Расчет сил в планетарной передаче
Расчет тангенциальных сил для зубчатого зацепления «a-g»:
 (62)
(62)
Где:
 – момент двигателя, Нм;
– момент двигателя, Нм;
 – число сателлитов;
– число сателлитов;
 – коэффициент неравномерности распределения нагрузки между сателлитами ( при
– коэффициент неравномерности распределения нагрузки между сателлитами ( при 4 = 1,1);
4 = 1,1);
 – диаметр начальной окружности шестерни «а», мм.
– диаметр начальной окружности шестерни «а», мм.
Радиальные силы:
 (63)
(63)
 (64)
(64)
 (65)
(65)
Реакции и
и  определяются из условия равновесия вала в плоскости ZX.
определяются из условия равновесия вала в плоскости ZX.
Примем
Сумма моментов сил в плоскости ZX:
 (65)
(65)
 (66)
(66)
 (67)
(67)
Сумма сил по оси Z:
 (68)
(68)
 (69)
(69)
 (70)
(70)
Реакции и
и  определяются из условия равновесия вала в плоскости YX.
определяются из условия равновесия вала в плоскости YX.
Сумма моментов сил в плоскости YX:

КПД комбинированного редуктора; - Момент инерции звена; К = 2 - Коэффициент, учитывающий неизвестные моменты инерции звена;
КПД волновой передачи, принимаемый 0,8; КПД планетарного механизма, принимаемый 0,8; КПД подшипников качения на валу, принимаемый 0,99; Был выбран BLDC-108 – бесконтактный двигатель постоянного тока с возбуждением от постоянных магнитов (неодим-железо-бор). Определение положения ротора в любой момент времени обеспечивают 3 датчика Холла (для сенсорных контроллеров управления). Для контроля над перегревом, установлены датчики температуры.
Рисунок 14 – двигатель BLDC-108
Характеристики двигателя представлены в таблице:
Таблица 6 – характеристики двигателя
| Характеристика | Значение |
| Напряжение | 48, В |
| Номинальная мощность | 1500, Вт |
| Пиковая мощность | 3000, Вт |
| Номинальный момент |  |
| Пиковый момент |  |
| Частота вращения | 4000 об/мин =418,879рад/с |
| Масса | 3,9 кг |
| КПД | 88% |
Габаритные размеры двигателя представлены на рисунке
Рисунок 15 – Габаритные размеры двигателя BLDC-108
Контроллер, используемый с данным двигателем - BAC-0501:
Рисунок 16 – Универсальный внешний контроллер BAC-0501
Определим требуемое передаточное отношение:
(33)В качестве механического преобразователя будем использовать связку из двух планетарных редукторов с
и волнового редуктора с .- 1 2 3 4 5 6 7 8 9 10
Расчёт механической части мехатронного модуля робота
-
Расчёт первого планетарного редуктора
Произведем расчет первого планетарного редуктора для привода 5 звена:
Передаточное отношение двух ступеней «a-g», «g-b»:
(34) (35)Число зубьев шестерни из условия прочности:
(36)Где
(37)тогда
(38)Расчет зубьев сателлита «g» и внутреннего колеса «b».
Число зубьев «b»:
(39)Число зубьев «g»:
(40)Проверим передаточное отношение планетарного механизма:
(41)Проверка условия сборки колес:
(42) – число сателлитов (2…5)Так как было получено целое число, то условие выполняется. Следовательно, принимаем
и .Определим минимальные диаметры шестерни:
По условию обеспечения контактной прочности зуба:
(43)Где:
– предел прочности выбранной стали 45 В48, равное 480 Мпа; коэффициент наклона зубьев; – коэффициент ширины зубчатого венца шестерни. (44)
По условию обеспечения прочности зубьев при изгибе:
Согласно ГОСТ 6636-69 «ОСНОВНЫЕ НОРМЫ ВЗАИМОЗАМЕНЯЕМОСТИ. НОРМАЛЬНЫЕ ЛИНЕЙНЫЕ РАЗМЕРЫ» [13] выбираем из стандартного ряда Ra40:
Определим модуль:
(45)Определим диаметр делительной окружности колеса «а»
где dдв – диаметр посадочной части вала двигателя
Для собираемости вала и шестерни назначаем
Рассчитаем модуль:
(46)По ГОСТ 9563–60 [14] берем модуль
.Для
, имеем: Диаметры делительных окружностей:
(47) (48) (49)Диаметры начальных окружностей:
(50) (51) (52)Межосевое расстояние зубчатых колес:
(53)Ширина зубчатого венца:
(54)По ГОСТ 6636–69 принимаем равным 5,3
. (55)По ГОСТ 6636–69 принимаем равным 8,0 мм.
Диаметр окружности вершин:
(56)
(57)
(58)Диаметры окружности впадин:
(59) (60) (61)Расчет сил в планетарной передаче
Расчет тангенциальных сил для зубчатого зацепления «a-g»:
(62)Где:
– момент двигателя, Нм; – число сателлитов; – коэффициент неравномерности распределения нагрузки между сателлитами ( при 4 = 1,1); – диаметр начальной окружности шестерни «а», мм.Радиальные силы:
(63) (64) (65)Реакции
и определяются из условия равновесия вала в плоскости ZX. Примем
Сумма моментов сил в плоскости ZX:
(65) (66) (67)Сумма сил по оси Z:
(68) (69) (70)Реакции
и определяются из условия равновесия вала в плоскости YX.Сумма моментов сил в плоскости YX: