ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 07.11.2023
Просмотров: 640
Скачиваний: 4
СОДЕРЖАНИЕ
1. ОПИСАНИЕ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА
2.1. Кинематическая схема механизма
2.2 Выбор электродвигателя, расчет параметров
2.3. Механическая система дополнительного электропривода
2.4 Выбор тиристорного преобразователя, расчет параметров
Необходимое значение полного сопротивления обмотки фазы реактора
2.5 Определение параметров тиристорного преобразователя
2.6 Расчет параметров якорной цепи привода
2.7 Определение области допустимой работы дополнительного
электропривода подъемной лебедки
2.8 Структурная схема силового канала дополнительного
электропривода подъемной лебедки
3. ОПТИМИЗАЦИЯ ЛИНЕАРИЗОВАННОЙ САУ
ДОПОЛНИТЕЛЬНОГО ЭЛЕКТРОПРИВОДА БУРОВОЙ ЛЕБЕДКИ
3.1 Функциональная схема дополнительного электропривода буровой
3.2 Структурная схема САУ электропривода РПД
3.3 Оптимизация контура тока якоря
3.4. Оптимизация контура скорости
3.5. Оптимизация контура положения
4.ИССЛЕДОВАНИЕ НЕЛИНЕЙНОЙ САУ ДОПОЛНИТЕЛЬНОГО
ЭЛЕКТРОПРИВОДА БУРОВОЙ ЛЕБЕДКИ
4.1 Основные нелинейности САУ дополнительного электропривода
4.2 Структурная схема нелинейной САУ дополнительного
электропривода буровой лебедки
4.3. Имитационная модель нелинейной САУ дополнительного
электропривода буровой лебедки
4.4. Исследование САУ дополнительного электропривода буровой лебедки на имитационной модели
ЗАДАНИЕ ДЛЯ РАЗДЕЛА «ФИНАНСОВЫЙ МЕНЕДЖМЕНТ,
РЕСУРСОЭФФЕКТИВНОСТЬ И РЕСУРСОСБЕРЕЖЕНИЕ»
5 ФИНАНСОВЫЙ МЕНЕДЖМЕНТ, РЕСУРСОЭФФЕКТИВНОСТЬ
5.1 Анализ конкурентных технических решений
5.2 Планирование научно-исследовательских работ
5.3 Определение ресурсоэффективности исследования
ЗАДАНИЕ ДЛЯ РАЗДЕЛА «СОЦИАЛЬНАЯ ОТВЕТСТВЕННОСТЬ»
6.1 Правовые и организационные вопросы обеспечения безопасности
6.2 Производственная безопасность
6.3 Экологическая безопасность
2.2 Выбор электродвигателя, расчет параметров
Электродвигатель МПБ90-1000УХЛ2.
Паспортные данные электродвигателя сведены в таблицу 2.2.
Таблица 2.2
| Наименование параметра | Обозначение | Величина |
| Номинальная мощность, кВт | Pдвн | 90 |
| Номинальное напряжение, В | Uдвн | 440 |
| Номинальная скорость вращения, об/мин | nдвн | 1000 |
| Номинальный ток якоря, А | Iн | 225 |
| Максимально допустимый ток перегрузки двигателя, А | Iдвмакс | 1,6Iн |
| Число пар полюсов | 2p | 2 |
| Число витков обмотки якоря на полюс | | 38,75 |
| Число параллельных ветвей обмотки якоря | | 2 |
| Число витков обмотки возбуждения на полюс | Wв | 431 |
| Сопротивление обмотки якоря при 15оС, Ом | Rоя | 0,0445 |
| Сопротивление добавочных полюсов при 15оС, Ом | Rдп | 0,0211 |
| Сопротивление обмотки возбуждения при 15оС, Ом | Rов | 8,2 |
| Номинальный ток возбуждения, А | Iвн | 12,7 |
| Номинальный поток главного полюса, Вб | Фдвн | 0,0406*1,18 |
| Номинальный вращающий момент, Н м | Мн | 860 |
| Момент инерции якоря, кг м 2 | Jдв | 1,6 |
| КПД двигателя, % | | 90,5 |
Кривая намагничивания приведена на рисунке 2.3.
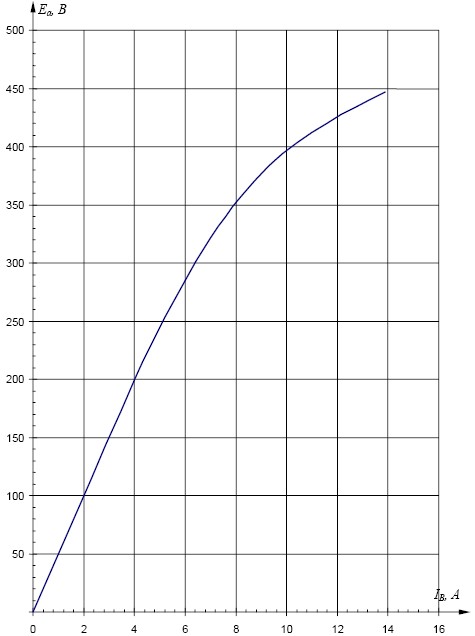
Рисунок 2.3. – Кривая намагничивания двигателя МПБ 90-1000УХЛ2
Расчетные параметры электродвигателя:
Номинальная угловая скорость вращения
3.14 рад дв.н
 nдв.н
nдв.н  1000 104,72
1000 104,72  .
. 30 30 с
Сопротивление двигателя в горячем состоянии
Rдв k Rt оя+15°С Rдп+15°С Ом,
где kt 1i - коэффициент, учитывающий зависимость сопротивления
о бмоток от температуры; принимаем 75 C - температура перегрева обмоток двигателя;
1
 м 0,004;
м 0,004; C
тогда
Rдв гор 1,30,04450,0211 0,08528Ом
Индуктивность двигателя

 дв Uдвн 440 0,0014 Гн,
дв Uдвн 440 0,0014 Гн, L 0,15
рдвн Iдвн 2 104,72 225
где0,10,2 – для машин с компенсационной обмоткой, принимаем 0,15
.
В с Н м
Коэффициент ЭДС
 и электромагнитного момента
и электромагнитного момента  при
при рад рад
номинальном потоке возбуждения
Uдв.н Iдв.н Rдв 440 225 0,08528
 c 4,018.
c 4,018. дв.н 104,72
Электромагнитный момент, соответствующий номинальному току Mэм Iдв.н с 225 4,018 904,05 Н м .
Момент трения на валу
Mс дв M эм Mдв.н 904,05860 44,05 Н м .
Максимально допустимый ток
Iдв.макс 1,6Iдв.н 1,6 225 360 А .
2.3. Механическая система дополнительного электропривода
подъемной лебедки
Расчетная схема одномассовой механической системы представлена на рисунке 2.4, где приняты следующие обозначения:
J1 – момент инерции двигателя и механизма;
Мдв.эм – электромагнитный момент двигателя;
М с – момент сопротивления типа сухого трения на валу; 1 – угловая скорость вращения электропривода.
Мсдв Мсмех Мгрприв
Мдв.эм 1
Рисунок 2.4 – Расчетная схема механической одномассовой системы
дополнительного электропривода лебедки
Параметры элементов механической одномассовой системы:
Момент инерции двигателя
Jдв 1,6 кг м . 2
Момент инерции механизма
Jэ.мех 0,0957 кг м . 2
Момент инерции поднимаемых масс, приведенный к валу двигателя, определим по выражению
Jm m D2б 2i1тп2 iпол12 ,кг м . 2
где m – масса поднимаемого груза, кг; Dб – диаметр барабана лебедки, Dб 0,786 м; iтп – результирующее передаточное число механизма лебедки; iпол – коэффициент полиспаста, iпол 10.
Момент инерции поднимаемых масс на первой передаче iтп 182,56 при поднимаемой массе m 123,204258,204103 кг
J
 m 123,204258,204103 0,7862 2182,561 2 1012 = 0,0057 0,01197 кг м . 2
m 123,204258,204103 0,7862 2182,561 2 1012 = 0,0057 0,01197 кг м . 2 Собственный момент сопротивления на валу электродвигателя Мсдв С I двн Мдвн 904,05 860 44,05 Н.м.
Постоянные потери в передаточном механизме лебедки
Ммех а М перн 0,1024 1000 102,4 Н.м,
где Мперн 1000Н.м – номинальный передаваемый момент механизма;
1
 пер.осн пер.доп пол 1 0 ,914 0,97 0, 94 0,1024 а b
пер.осн пер.доп пол 1 0 ,914 0,97 0, 94 0,1024 а b 2пер.осн пер.доп пол 2 0 ,914 0,97 0, 94
a – коэффициент постоянных потерь в передаче; b – коэффициент переменных потерь в передаче;
КПД передаточного механизма ред.осн 0,914,
КПД талевой оснасткипол 0,94
КПД редуктора дополнительного привода ред.доп 0,97;
Момент, развиваемый грузом на передаче iтп 182,56 m q D
 Мгр.прив б
Мгр.прив б 2iред iпол
Эквивалентный момент инерции на «тихой» передаче
Jэ Jдв Jмех Jm 1,60,09570,00570,01197 1,71,71 кг м . 2
Момент сопротивления реактивного характера на оси эквивалентной массы
М М Мс сдв мех 44,05 102, 4146,45 Н м.
Электромеханическая постоянная времени привода наиболее существенно изменяется при работе на второй передаче и имеет: минимальное значение
Jэмин Rяц 1,7014 0,155
Т
 ммин 2 2 0,0163с С 4,018
ммин 2 2 0,0163с С 4,018и максимальное значение
Jэмакс Rяц 1,71 0,155
 Тммакс С2 4,0182 0,0164 с.
Тммакс С2 4,0182 0,0164 с. Структурная схема одномассовой механической системы приведена на рисунке 2.5.
Рисунок 2.5 – Структурная схема одномассовой механической системы
Расчетная схема механической системы дополнительного электропривода лебедки представляет собой двухмассовую систему, представленную на рисунке
2.6, где приняты следующие обозначения:
J1 – момент инерции двигателя и механизма;
J2 – момент инерции поднимаемых масс;
Мдв эм – электромагнитный момент двигателя;
М с – момент сопротивления типа сухого трения на валу первой массы;
Мгр – момент нагрузки, развиваемый грузом, активный по характеру; С12 – эквивалентная угловая жесткость; bB12 – эквивалентный коэффициент внутреннего демпфирования.
Мсдв Мсмех С Мгр
М

bВ
12
Рисунок 2.6 – Расчетная схема двухмассовой механической системы дополнительного электропривода подъемной лебедки
Линейная жесткость подъемного каната для компоновочной схемы с
iпол 10 (см. рисунок 2.2) определяется по выражению

 Сl iпол к 50,25 10 6 6 14,36 10 6 Н/м
Сl iпол к 50,25 10 6 6 14,36 10 6 Н/м С 10 50,25 10
l 10 35
-
линейная жесткость участка длиной l = (10-35) м
С Е Sк к к 1,25 10 114,02 10 4 50,25 10 6 Н
-
жесткость одного погонного метра каната;
 Ек 1,1 1, 41011Н м2
Ек 1,1 1, 41011Н м2 -
модуль продольной упругости для стального каната, принимаем
Е
 к 1,25 10 11Н/м2; Sк 0,5dк2 0,53,14 0,032 2 4,02 10 4 м2
к 1,25 10 11Н/м2; Sк 0,5dк2 0,53,14 0,032 2 4,02 10 4 м2 4 4
-площадь сечения проволок.
При изменении высоты подъема эквивалентная жесткость канатов изменяется в малых пределах, так как при этом будет изменяться только длина параллельно включенных канатов в талевой системе.
Параметры двухмассовой механической системы
Структурная схема двухмассовой механической системы (ДМС) привода подъема приведена на рисунке 2.8.
Момент инерции первой массы
J1 Jдв Jмех 1,60,0957 1,6957 кг м 2.
Момент сопротивления на валу первой массы
Мс Мсдв Ммех 44,05 102, 4146,45 Н м.
Момент инерции второй массы и соответствующий грузовой момент на ее оси при работе на первой передаче iтп 182,56
J2 0,00570,01197 кг м , 2
Мгр.прив (260,184 545,279) Н м.
При работе на «тихой» передаче iред 182,56 значение углового коэффициента жесткости ДМС изменяется в пределах:

 50,25 10 2
50,25 10 2 