ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 07.11.2023
Просмотров: 617
Скачиваний: 4
СОДЕРЖАНИЕ
1. ОПИСАНИЕ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА
2.1. Кинематическая схема механизма
2.2 Выбор электродвигателя, расчет параметров
2.3. Механическая система дополнительного электропривода
2.4 Выбор тиристорного преобразователя, расчет параметров
Необходимое значение полного сопротивления обмотки фазы реактора
2.5 Определение параметров тиристорного преобразователя
2.6 Расчет параметров якорной цепи привода
2.7 Определение области допустимой работы дополнительного
электропривода подъемной лебедки
2.8 Структурная схема силового канала дополнительного
электропривода подъемной лебедки
3. ОПТИМИЗАЦИЯ ЛИНЕАРИЗОВАННОЙ САУ
ДОПОЛНИТЕЛЬНОГО ЭЛЕКТРОПРИВОДА БУРОВОЙ ЛЕБЕДКИ
3.1 Функциональная схема дополнительного электропривода буровой
3.2 Структурная схема САУ электропривода РПД
3.3 Оптимизация контура тока якоря
3.4. Оптимизация контура скорости
3.5. Оптимизация контура положения
4.ИССЛЕДОВАНИЕ НЕЛИНЕЙНОЙ САУ ДОПОЛНИТЕЛЬНОГО
ЭЛЕКТРОПРИВОДА БУРОВОЙ ЛЕБЕДКИ
4.1 Основные нелинейности САУ дополнительного электропривода
4.2 Структурная схема нелинейной САУ дополнительного
электропривода буровой лебедки
4.3. Имитационная модель нелинейной САУ дополнительного
электропривода буровой лебедки
4.4. Исследование САУ дополнительного электропривода буровой лебедки на имитационной модели
ЗАДАНИЕ ДЛЯ РАЗДЕЛА «ФИНАНСОВЫЙ МЕНЕДЖМЕНТ,
РЕСУРСОЭФФЕКТИВНОСТЬ И РЕСУРСОСБЕРЕЖЕНИЕ»
5 ФИНАНСОВЫЙ МЕНЕДЖМЕНТ, РЕСУРСОЭФФЕКТИВНОСТЬ
5.1 Анализ конкурентных технических решений
5.2 Планирование научно-исследовательских работ
5.3 Определение ресурсоэффективности исследования
ЗАДАНИЕ ДЛЯ РАЗДЕЛА «СОЦИАЛЬНАЯ ОТВЕТСТВЕННОСТЬ»
6.1 Правовые и организационные вопросы обеспечения безопасности
6.2 Производственная безопасность
6.3 Экологическая безопасность

PI-RT
а)
б)
Рисунок 4.4 – Имитационная модель ПИ–регулятора тока с постоянным ограничением: а) – суперблок; б)– схема набора модели
Ограничение момента двигателя в пусковых режимах может быть достигнуто применением задатчика интенсивности скорости во входной цепи управления электропривода. Простейшим задатчиком скорости является линейный задатчик. Фактически установка линейного задатчика скорости обеспечивает постоянное значение темпа нарастания (спадания при торможении) скорости, т.е. постоянное ускорение (замедление) привода, что достигается поддержанием постоянного значения динамического момента электропривода.
При этом электромагнитный момент электродвигателя и его максимальное значение зависят от значения статического момента нагрузки. Задатчик интенсивности с s-образной характеристикой позволит дополнительно ограничить вторую производную скорости (темп нарастания динамического момента электропривода) и тем самым повысить плавность переходных процессов в электроприводе.
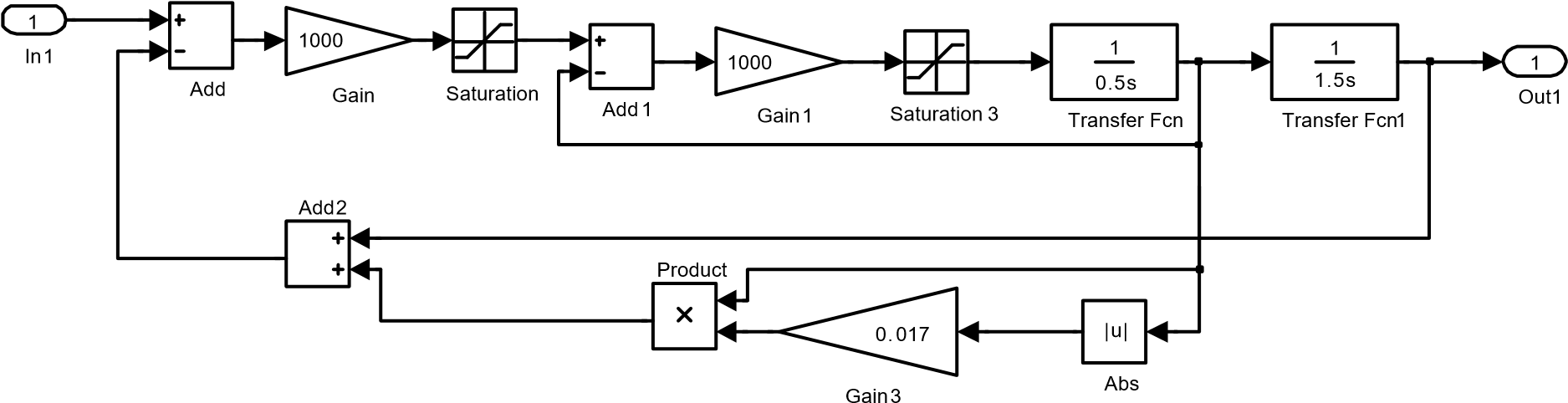
Модель задатчика интенсивности с s-образной характеристикой принята аналоговой с максимальными значениями входного и выходного напряжения 10 В (рисунок 4.5). Схема набора имитационной модели задатчика интенсивности с S-образной характеристикой представлена на рисунке 4.6.
Приняты следующие параметры:
t1 0,5 c, t2 1c,Tзи 2t1 t2 2 0 ,5 1 2 с
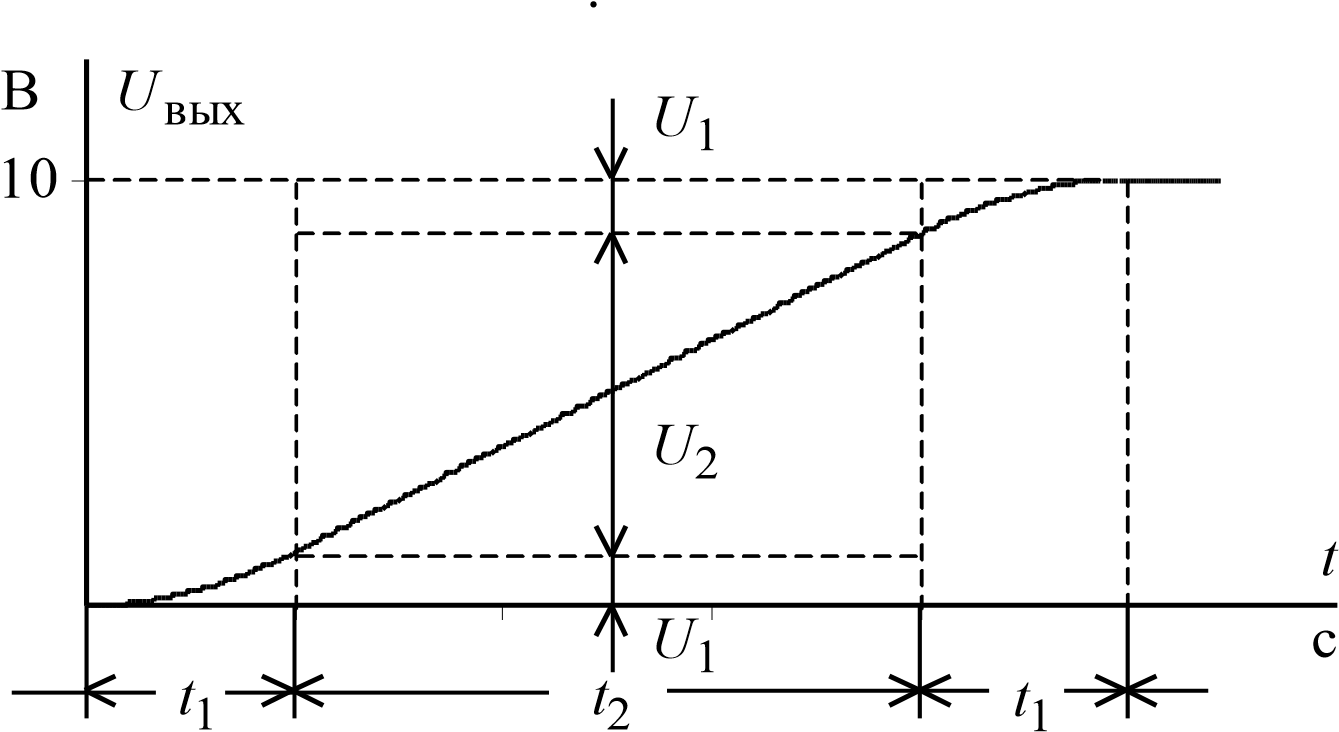
Рисунок 4.5 – Временная характеристика S-образного задатчика интенсивности

ZI
а)
б)
Рисунок 4.6 – Имитационная модель задатчика интенсивности с S-образной
характеристикой: а) – суперблок; б)– схема набора модели
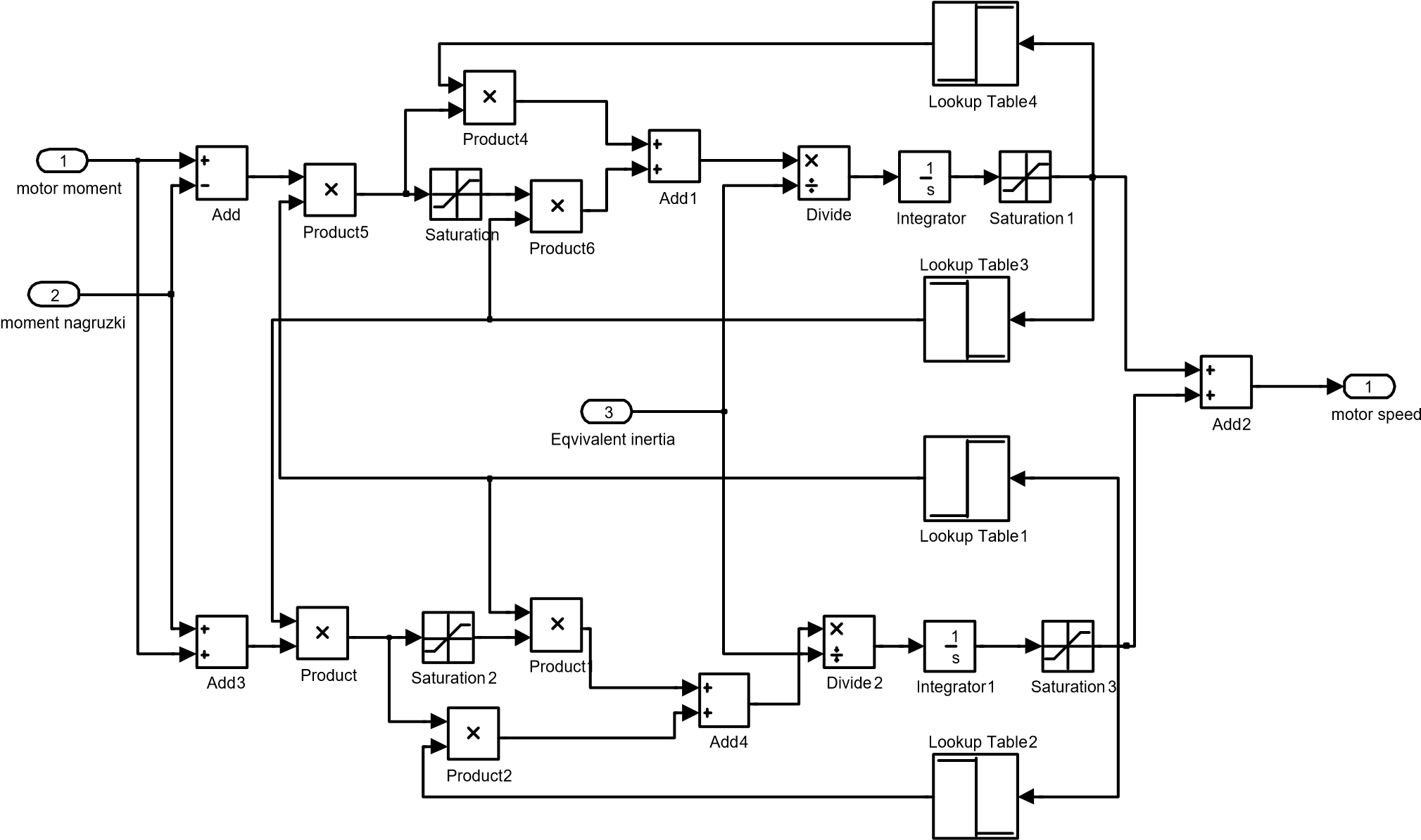
Имитационная модель инерционной массы, набранной в пакете Simulink системы MATLAB, с учетом в общем случае переменного момента инерции J и переменного момента сопротивления активного характера МС приведена на рисунке 4.7. В модели присутствуют две инерционные массы т.к. система является двухмассовой. Параметры настройки имитационной модели: - блоки Saturation и Saturation1 Upper limit=10000, Lower limit=0;
-
блоки Saturation2 и Saturation3 Upper limit=0, Lower limit=-10000; - блок Lookup Table4
| input | -10000 | 0 | 0.0001 | 10000 |
| output | 0 | 0 | 1 | 1 |
| - блок Lookup Table3 | | | | |
| input | -10000 | 0 | 0.0001 | 10000 |
| output | 1 | 1 | 0 | 0 |
| - блок Lookup Table1 | | | | |
| input | -10000 | -0.0001 | 0 | 10000 |
| output | 0 | 0 | 1 | 1 |
-
блок Lookup Table2
| input | -10000 | -0.0001 | 0 | 10000 |
| output | 1 | 1 | 0 | 0 |
Значения момента инерции J и момента сопротивления реактивного характера МС могут изменяться произвольным образом в зависимости от времени или координат электропривода.
INMASS
а)
б)
Рисунок 4.7 – Имитационная модель инерционной массы:
а – суперблок; б – схема набора модели
Т.к. диаметр барабана является изменяющейся составляющейв работе буровой лебедки, он реализованн логическим элементом (блок S-Function Builder). Параметры настройки логического элемента:
u0[0] – отработанная высота;
y0[0] – диаметр барабана.
if (u0[0]>=0) if (u0[0]<=6.517) y0[0]=0.629; if (u0[0]>6.517) if (u0[0]<=14.22) y0[0]=0.681; if (u0[0]>14.22) if (u0[0]<=22.52) y0[0]=0.734; if (u0[0]>22.52) if (u0[0]<=25) y0[0]=0.786;
Функционального преобразователя Мс гр прив f Д ,mб гр и Jэкв2 f Д , mб гр .
Приведенный момент сопротивления груза на крюке и эквивалентный момент инерции второй массы переменны в зависимости от диаметра барабана лебедки Д
б и массы груза на крюке mгр.
Имитационная модель функционального преобразователя
Мс гр прив f Д ,mб гр и Jэкв2 f Д , mб гр представлена на рисунке 4.8.

Mc gr priv Jekv2(m()m)
а)
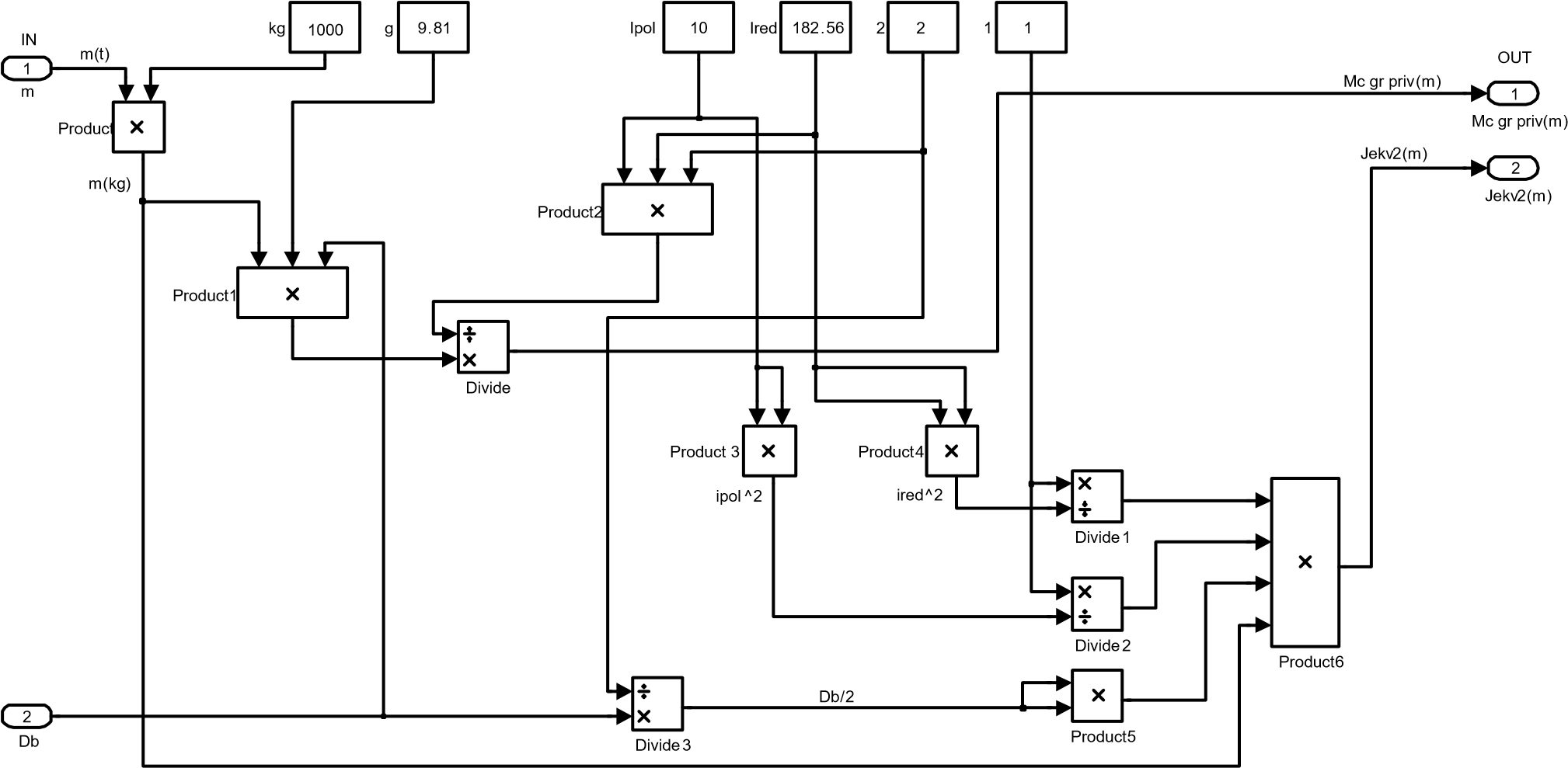
Рисунок 4.8 – Имитационная модель функционального преобразователя
Мс гр прив f Д ,mб гр и Jэкв2 f Д , mб гр: а – суперблок; б – схема набора модели Приведенный угловой коэффициент жесткости ДМС С12 переменный в зависимости от отработанной высоты Нотр и диаметра барабана лебедки Дб. Имитационная модель функционального преобразователя С12 f Д , Н б отр представлена на рисунке 4.9.

C12(H)
а)
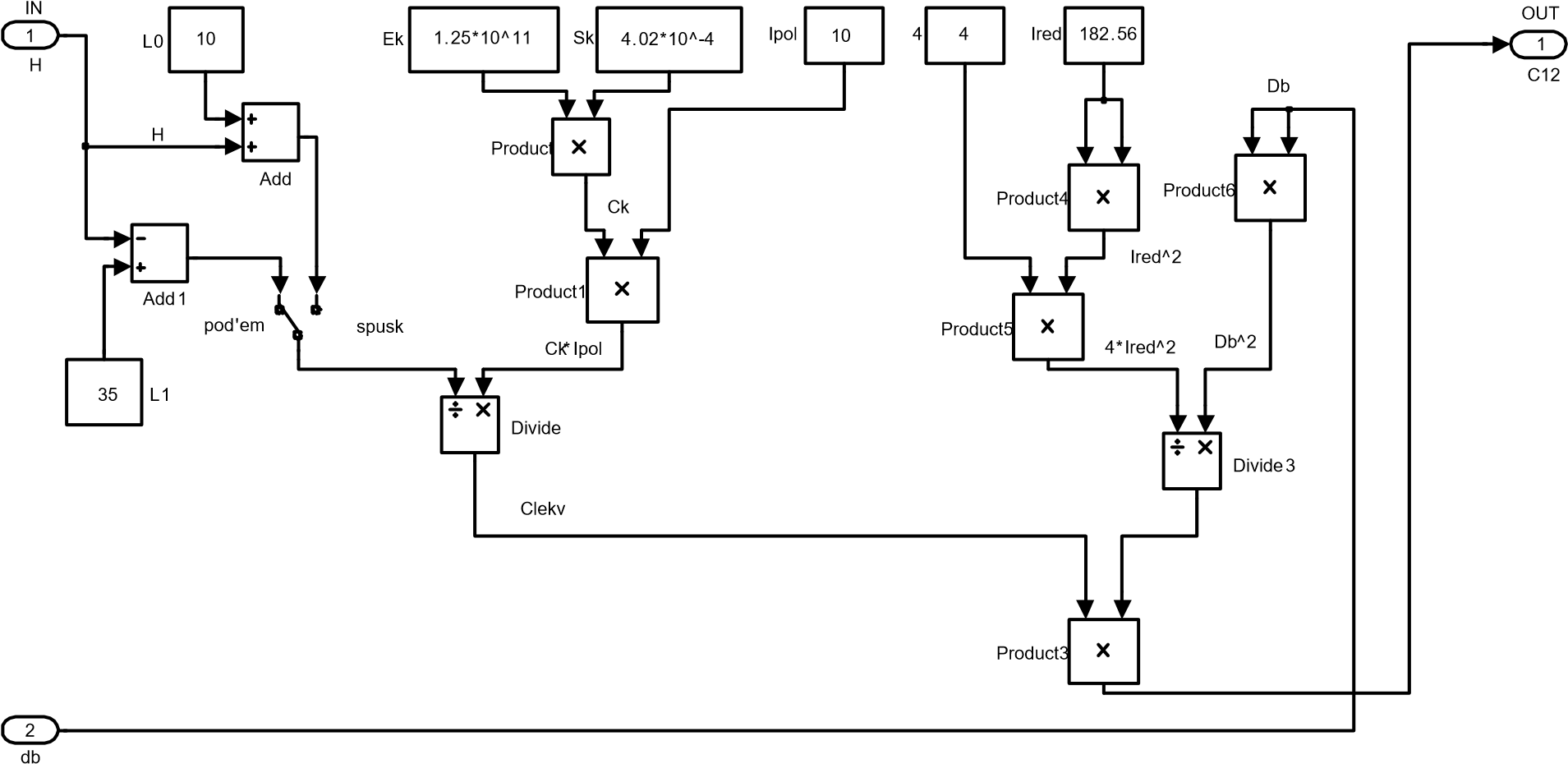
б)
Рисунок 4.9 – Схема функционального преобразователя
а – суперблок; б – схема набора модели
Коэффициент внутреннего демпфирования ДМС bÂ12 переменный в зависимости от приведенного углового коэффициента жесткости ДМС С12 и эквивалентного момента инерции второй массы Jэкв2. Имитационная модель функционального преобразователя bВ12 f С12 , Jэкв2 представлена на рисунке 4.10.

b
а)
Рисунок 4.10 – Имитационная модель функционального преобразователя
bВ12 f С12 , Jэкв2 :
а – суперблок; б – схема набора модели
Коэффициент передачи механизма Км переменный в зависимости от диаметра барабана лебедки Дб. Имитационная модель функционального
преобразователя Км f Дб представлена на рисунке 4.11.

Km=f(Db)1
а)
б)
Рисунок 4.11 – Имитационная модель функционального преобразователя : а –
суперблок; б – схема набора модели
Коэффициент передачи датчика положения Кдп переменный в зависимости от диаметра барабана лебедки Дб. Имитационная модель функционального преобразователя
Кдп f Дб представлена на рисунке 4.12.

Kdp=f(Db)
а)
б)
Рисунок 4.12 – Имитационная модель функционального преобразователя
Кдп f Дб : а – суперблок; б – схема набора модели
Коэффициент П-регулятора положения переменный в зависимости от коэффициента передачи механизма Км и от коэффициента передачи датчика положения Кдп . Имитационная модель функционального преобразователя Крп f К м,Кдп представлена на рисунке 4.13.

Krp=f(Km)
а)
б)
Рисунок 4.13 – Имитационная модель функционального преобразователя
Крп f К м,Кдп: а – суперблок; б – схема набора модели
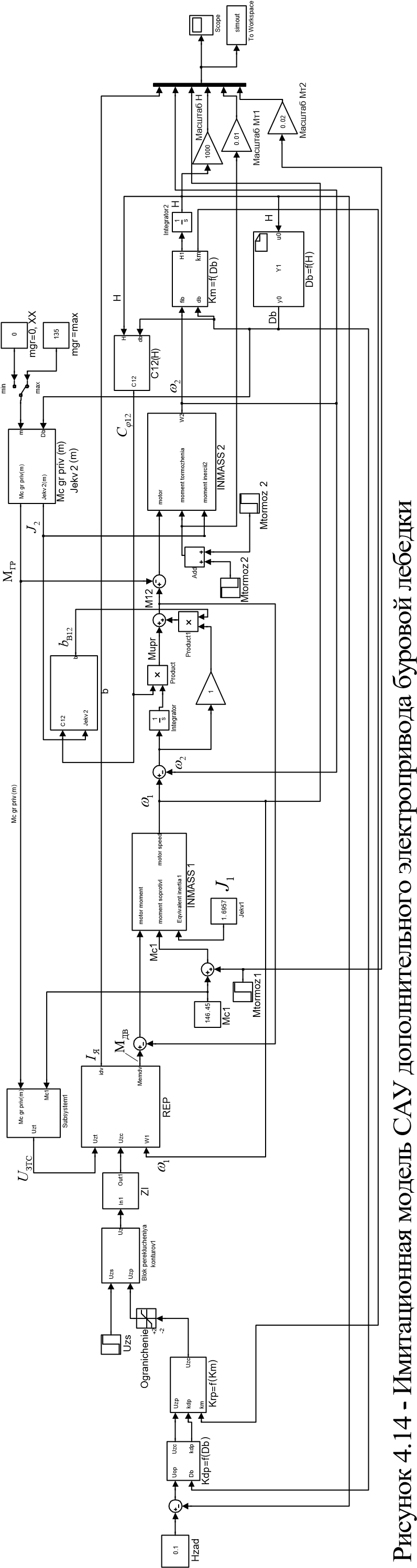
Имитационная модель САУ дополнительного электропривода буровой лебедки, разработанная по структурной схеме (рисунке 4.1), представлена на рисунке 4.14.
4.4. Исследование САУ дополнительного электропривода буровой лебедки на имитационной модели
Целью исследований является проверка работоспособности дополнительного электропривода во всех основных технологических режимах работы.
Исследования сводились к проверке работы САУ главного электропривода буровой лебедки в следующих режимах: 1) Режим спуско-подъемных операций; 2) Режим подачи долота при бурении.
4.4.1. Исследование САУ дополнительного электропривода буровой лебедки при спуско-подъемных операциях
Особенности работы в режиме спуско-подъемных операций
Перед выполнением операций по подъёму или спуску колонны труб колонна удерживается неподвижной, канаты лебедки не натянуты, привод включен, регуляторы блокированы. Перед тем, как будет освобождена колонна, предварительно необходимо выбрать слабину и натянуть канаты, создать удерживающий момент на валу второй массы (удерживающую подъёмную силу на крюке). Затем освобождается колонна и на привод подается задание требуемой скорости на подъем или спуск колонны.
Программа исследований электропривода лебедки в режиме спускоподъемных операций
Исследования электропривода подъёмной лебедки проводятся в следующих основных технологических режимах работы подъёмной лебедки.
-
Подъем или спуск колонны труб. Работа на подъем колонны. Удерживается колонна труб, производится выбор слабины канатов, натяжение канатов, создание удерживающего момента на валу второй массы в режиме блокированного регулятора скорости. -
Освобождается колонна труб, колонна удерживается лебедкой (канаты натянуты), подается задание скорости привода на подъём или спуск, в верхнем или нижнем положении осуществляется останов привода с удержанием колонны, наложением тормоза и отключением привода (блокировкой регуляторов). -
Подъем или спуск пустого грузозахватного приспособления. Трогание на подъём или спуск из положения «удержание груза тормозом», регулирование скорости и останов привода с наложением тормоза. В этом режиме канаты предварительно натянуты. -
Установка груза при подъёме или спуске в крайние или заданную позиции по высоте в следящем режиме работы электропривода. Результаты исследований