ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 07.11.2023
Просмотров: 662
Скачиваний: 4
СОДЕРЖАНИЕ
1. ОПИСАНИЕ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА
2.1. Кинематическая схема механизма
2.2 Выбор электродвигателя, расчет параметров
2.3. Механическая система дополнительного электропривода
2.4 Выбор тиристорного преобразователя, расчет параметров
Необходимое значение полного сопротивления обмотки фазы реактора
2.5 Определение параметров тиристорного преобразователя
2.6 Расчет параметров якорной цепи привода
2.7 Определение области допустимой работы дополнительного
электропривода подъемной лебедки
2.8 Структурная схема силового канала дополнительного
электропривода подъемной лебедки
3. ОПТИМИЗАЦИЯ ЛИНЕАРИЗОВАННОЙ САУ
ДОПОЛНИТЕЛЬНОГО ЭЛЕКТРОПРИВОДА БУРОВОЙ ЛЕБЕДКИ
3.1 Функциональная схема дополнительного электропривода буровой
3.2 Структурная схема САУ электропривода РПД
3.3 Оптимизация контура тока якоря
3.4. Оптимизация контура скорости
3.5. Оптимизация контура положения
4.ИССЛЕДОВАНИЕ НЕЛИНЕЙНОЙ САУ ДОПОЛНИТЕЛЬНОГО
ЭЛЕКТРОПРИВОДА БУРОВОЙ ЛЕБЕДКИ
4.1 Основные нелинейности САУ дополнительного электропривода
4.2 Структурная схема нелинейной САУ дополнительного
электропривода буровой лебедки
4.3. Имитационная модель нелинейной САУ дополнительного
электропривода буровой лебедки
4.4. Исследование САУ дополнительного электропривода буровой лебедки на имитационной модели
ЗАДАНИЕ ДЛЯ РАЗДЕЛА «ФИНАНСОВЫЙ МЕНЕДЖМЕНТ,
РЕСУРСОЭФФЕКТИВНОСТЬ И РЕСУРСОСБЕРЕЖЕНИЕ»
5 ФИНАНСОВЫЙ МЕНЕДЖМЕНТ, РЕСУРСОЭФФЕКТИВНОСТЬ
5.1 Анализ конкурентных технических решений
5.2 Планирование научно-исследовательских работ
5.3 Определение ресурсоэффективности исследования
ЗАДАНИЕ ДЛЯ РАЗДЕЛА «СОЦИАЛЬНАЯ ОТВЕТСТВЕННОСТЬ»
6.1 Правовые и организационные вопросы обеспечения безопасности
6.2 Производственная безопасность
6.3 Экологическая безопасность
мин arccos
 сэпмакс Iдвн Rяц arccos 4,018 104, 72225 0,155
сэпмакс Iдвн Rяц arccos 4,018 104, 72225 0,155 КucEd0 0,9 513
arccos 0,986875 9,29333 ,
принимаем мин 10.
Предельная электромеханическая характеристика привода рассчитывается по выражению 1
( )I
 (Кuc Еd0 cosмин Iдв Rяц)
(Кuc Еd0 cosмин Iдв Rяц) К Ф двном
Результаты расчетов сведены в таблицу 2.3.
Таблица 2.3
| | | Kuc 0,9 | | |
| Фдв 0,0406 Вб | Iдв, А | 0 | Iдв н 225 А | Iдв макс 360 А |
| дв, рад/с | 113,16 2 | 104,7 | 99,275 | |
| | | Kuc 1 | | |
| Фдв 0,0406 Вб | Iдв, А | 0 | Iдв н 225 А | Iдв макс 360 А |
| дв, рад/с | 125,73 6 | 117,056 | 111,848 | |
По данным таблицы 2.3 построены предельные характеристики дополнительного электропривода подъемной лебедки, ограничивающие его область допустимой работы в 1 квадранте. Предельные характеристики дополнительного электропривода подъемной лебедки приведены на рисунке
2.10.
Рисунок 2.10 – Область допустимой работы дополнительного электропривода лебедки
2.8 Структурная схема силового канала дополнительного
электропривода подъемной лебедки
В силовой канал электропривода входят:
-
тиристорный преобразователь, выполняющий функцию электрического преобразователя; -
электродвигатель, который выполняет функцию электромеханического преобразователя; - механическая система, которая выполняет функцию механического преобразователя.
Структурная схема силового канала регулируемого электропривода приведена на рисунке 2.12:
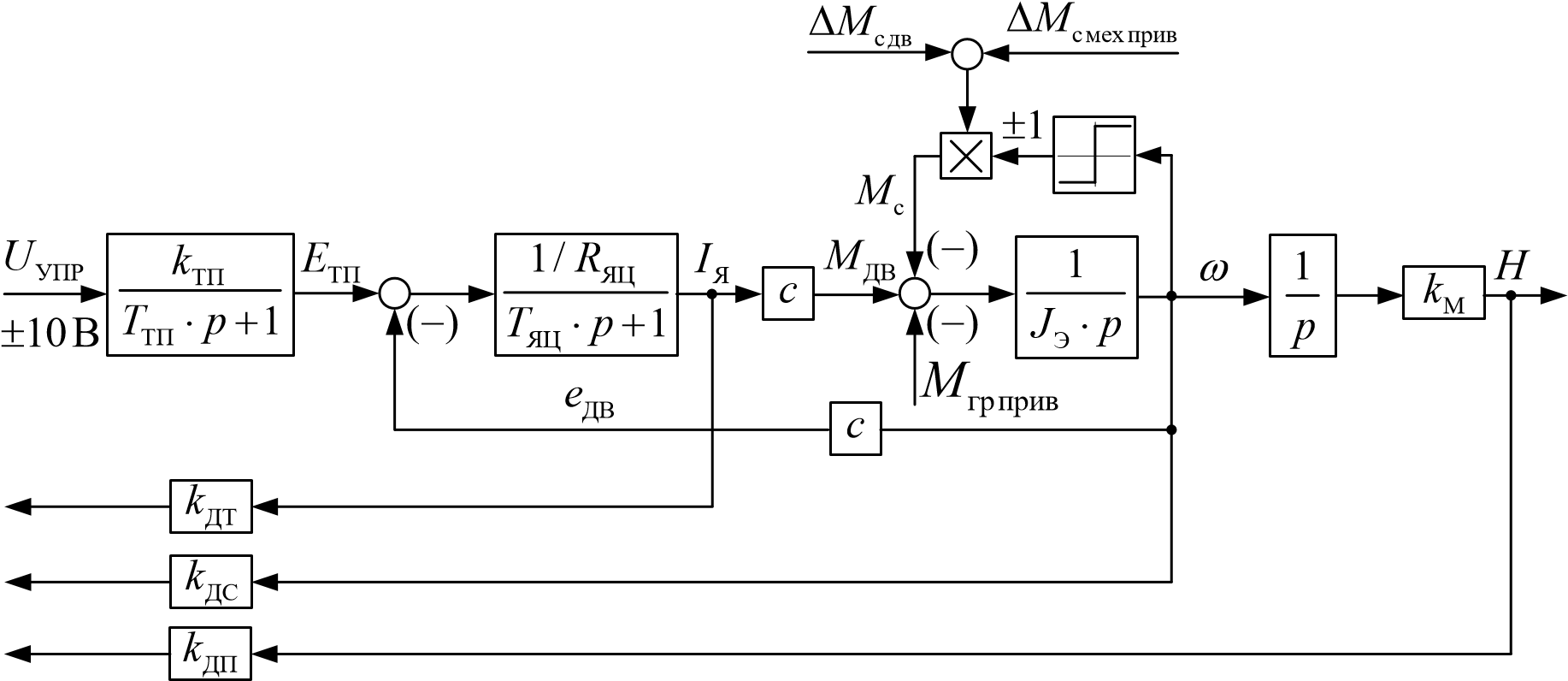
Рисунок 2.12 – Структурная схема силового канала главного электропривода подъемной лебедки Коэффициент передачи датчика тока якоря
Uзтмакс 10
 kдт 0,02777В/А.
kдт 0,02777В/А. Iэпмакс 360
Коэффициент передачи датчика скорости
 Uзс.макс 10 В с
Uзс.макс 10 В сkдс 0,0955
 .
. эп.макс 104,72 рад
Коэффициент передачи датчика положения
nдп iпол 1000 10 дискрет
k
 дп 5063,14 4051,8
дп 5063,14 4051,8  , Dб 3,140,629 0,786 м
, Dб 3,140,629 0,786 мгде nдп 1000число импульсов датчика положения на один оборот вала.
Коэффициент передачи механизма
м
 Dб 0,629 0,786 м k 0,00017 0,000215
Dб 0,629 0,786 м k 0,00017 0,000215  .
.2iпол iред 2 10 182,56 рад
Параметры структурной схемы приведены в таблице 2.4.
Таблица 2.4
-
UУП
В
10
kТП
161,082
ТТП
с
0,00167
RЯЦ
Ом
155,008 10 3
LЯЦ
Гн
1,712 10 3
ТЯЦ
c
11,0446 10 3
с
В с
рад
4,018
JЭ
кгм2
1,7 1,71
kМ
м
рад
0,00017 0,000215
kДТ
В
А
0,02777
kДС
В с
рад
0,0955
kДП
дискр
м
5063,14 4051,8
МГР.ПРИВ
Н м
260,184 545,279
М С.ДВ
Н м
44,05
ММЕХ
Н м
102,4
М С
Н м
146,45
3. ОПТИМИЗАЦИЯ ЛИНЕАРИЗОВАННОЙ САУ
ДОПОЛНИТЕЛЬНОГО ЭЛЕКТРОПРИВОДА БУРОВОЙ ЛЕБЕДКИ
3.1 Функциональная схема дополнительного электропривода буровой
лебедки (электропривод РПД)
Функциональная схема электропривода РПД приведена на рисунке 3.1.
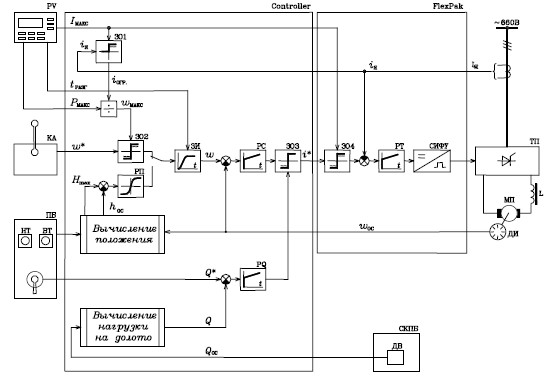
Рисунок 3.1. - Функциональная схема электропривода РПД
Основные функциональные устройства дополнительного электропривода лебедки:
ТП – тиристорный преобразователь;
МП – двигатель постоянного тока;
СИФУ – система импульсно-фазового управления;
РТ – регулятор тока;
РС – регулятор скорости;
РQ – регулятор натяжения каната;
КА – командоаппарат;
ЗО – звено ограничения;
РП – регулятор положения;
ДВ – датчик веса;
ДИ – датчик импульсный;
ПБ – пульт бурильщика;
Блок вычисления положения;
Блок вычисления нагрузки на долото;
Электропривод РПД выполнен по системе ТП-Д постоянного тока. Тиристорный преобразователь выполнен нереверсивным. Поэтому для обеспечения спуска порожнего элеватора или подачи инструмента при легкой колонне бурильных труб предусмотрен реверс двигателя путем изменения полярности обмотки возбуждения с помощью контактора КМ. Питание обмотки возбуждения осуществляется от однофазного мостового выпрямителя, выполненного на тиристорах и встроенного в микропроцессорную систему управления FlexPak.
САР дополнительного электропривода лебедки в режиме поддержания заданной скорости подъема и спуска трехконтурная, аналогичная основной лебедки. Отличие заключается в том, что контур тока выполнен в микропроцессорной системе управления FlexPak, а контуры скорости и положения - в контроллере МПК.
В режиме регулятора подачи долота (РПД) изменяется структура САР дополнительного привода. Звено ограничения ЗО3 выявляет наибольший сигнал с выхода регулятора скорости РС или с выхода регулятора натяжения каната (РQ). С выхода ЗО3 сигнал задания тока поступает на вход регулятора тока РТ.
ПИ-регулятор натяжения РQ сравнивает заданное усилие на долото Q* и фактическое усилие Q, вычисляемое контроллером, и выдает задание тока i* на вход регулятора тока РТ. В результате привод будет работать с постоянством нагрузки на долото.
До соприкосновения долота с забоем сигнал на выходе ПИ-регулятора натяжения РQ минимальный. Поэтому сигнал с выхода регулятора скорости РС (который больше сигнала с выхода регулятора натяжения РQ) поступает на вход регулятора тока РТ. Привод работает с постоянством скорости спуска.
При соприкосновении долота с забоем сигнал на выходе регулятора натяжения РQ возрастет. Если сигнал с выхода регулятора натяжения РQ будет превышать сигнал с выхода регулятора скорости РС (задана малая скорость спуска), то привод будет работать с постоянством натяжения в мертвом конце каната (постоянством веса).
В общем случае, если при бурении задана большая скорость спуска, то бурение происходит с постоянством скорости (при этом нагрузка на долото не постоянна). Если при бурении задана малая скорость бурения, то бурение происходит с постоянством нагрузки на долото (постоянством усилия в мертвом конце каната).
3.2 Структурная схема САУ электропривода РПД
Структурная схема линеаризованной САУ электропривода РПД приведена на рисунке 3.2.
Рисунок 3.2 – Структурная схема САУ дополнительного привода подъемной лебедки

На схеме приняты следующие обозначения:
РС – регулятор скорости;
РТ – регулятор тока;
РП – регулятор положения;
Кдт – коэффициент передачи входной цепи обратной связи РТ;
Кдс – коэффициент входной цепи обратной связи регулятора и передачи датчика скорости.
Кдп – коэффициент передачи датчика положения.
САУ электропривода РПД реализована как трехконтурная с внутренними контурами тока якоря и скорости и внешним контуром положения.
Оптимизация САУ электропривода РПД сводится к определению типа регуляторов, определения параметров регуляторов и цепей обратных связей, обеспечивающих технически оптимальные переходные процессы.
Оптимизация проводится в два этапа:
-
первый этап – аналитический для линеаризованной системы
регулирования;
-
второй этап – метод имитационного моделирования с учетом влияния ЭДС двигателя и основных нелинейностей электропривода.