ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 07.11.2023
Просмотров: 657
Скачиваний: 4
СОДЕРЖАНИЕ
1. ОПИСАНИЕ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА
2.1. Кинематическая схема механизма
2.2 Выбор электродвигателя, расчет параметров
2.3. Механическая система дополнительного электропривода
2.4 Выбор тиристорного преобразователя, расчет параметров
Необходимое значение полного сопротивления обмотки фазы реактора
2.5 Определение параметров тиристорного преобразователя
2.6 Расчет параметров якорной цепи привода
2.7 Определение области допустимой работы дополнительного
электропривода подъемной лебедки
2.8 Структурная схема силового канала дополнительного
электропривода подъемной лебедки
3. ОПТИМИЗАЦИЯ ЛИНЕАРИЗОВАННОЙ САУ
ДОПОЛНИТЕЛЬНОГО ЭЛЕКТРОПРИВОДА БУРОВОЙ ЛЕБЕДКИ
3.1 Функциональная схема дополнительного электропривода буровой
3.2 Структурная схема САУ электропривода РПД
3.3 Оптимизация контура тока якоря
3.4. Оптимизация контура скорости
3.5. Оптимизация контура положения
4.ИССЛЕДОВАНИЕ НЕЛИНЕЙНОЙ САУ ДОПОЛНИТЕЛЬНОГО
ЭЛЕКТРОПРИВОДА БУРОВОЙ ЛЕБЕДКИ
4.1 Основные нелинейности САУ дополнительного электропривода
4.2 Структурная схема нелинейной САУ дополнительного
электропривода буровой лебедки
4.3. Имитационная модель нелинейной САУ дополнительного
электропривода буровой лебедки
4.4. Исследование САУ дополнительного электропривода буровой лебедки на имитационной модели
ЗАДАНИЕ ДЛЯ РАЗДЕЛА «ФИНАНСОВЫЙ МЕНЕДЖМЕНТ,
РЕСУРСОЭФФЕКТИВНОСТЬ И РЕСУРСОСБЕРЕЖЕНИЕ»
5 ФИНАНСОВЫЙ МЕНЕДЖМЕНТ, РЕСУРСОЭФФЕКТИВНОСТЬ
5.1 Анализ конкурентных технических решений
5.2 Планирование научно-исследовательских работ
5.3 Определение ресурсоэффективности исследования
ЗАДАНИЕ ДЛЯ РАЗДЕЛА «СОЦИАЛЬНАЯ ОТВЕТСТВЕННОСТЬ»
6.1 Правовые и организационные вопросы обеспечения безопасности
6.2 Производственная безопасность
6.3 Экологическая безопасность
 p 1
p 1W pбфс.зам
bc ac aт Тт pac aт Тт paт Тμт p(Тт p 1) 1 11
 2 2 2 0.00167 p 1
2 2 2 0.00167 p 1
2 2 2 0.00167 p2 2 0.00167 p 2 0.00167 p0.00167 p 11 11
0.1398 p 10.471

4.977 10 10 p4 2.981 10 7 p3 8.925 10 5 p2 1.336 10 2 p 1.
Передаточная функция замкнутого контура скорости с фильтром на входе
сф
 k
kW p с.зам
b a ac c т Тт p a a Т c т т p a Т т т p Т p т 11 11

2 2 2 0.00167 p2 2 0.00167 p 2 0.00167 p0.00167 p 11 11
10.471
1)
2)
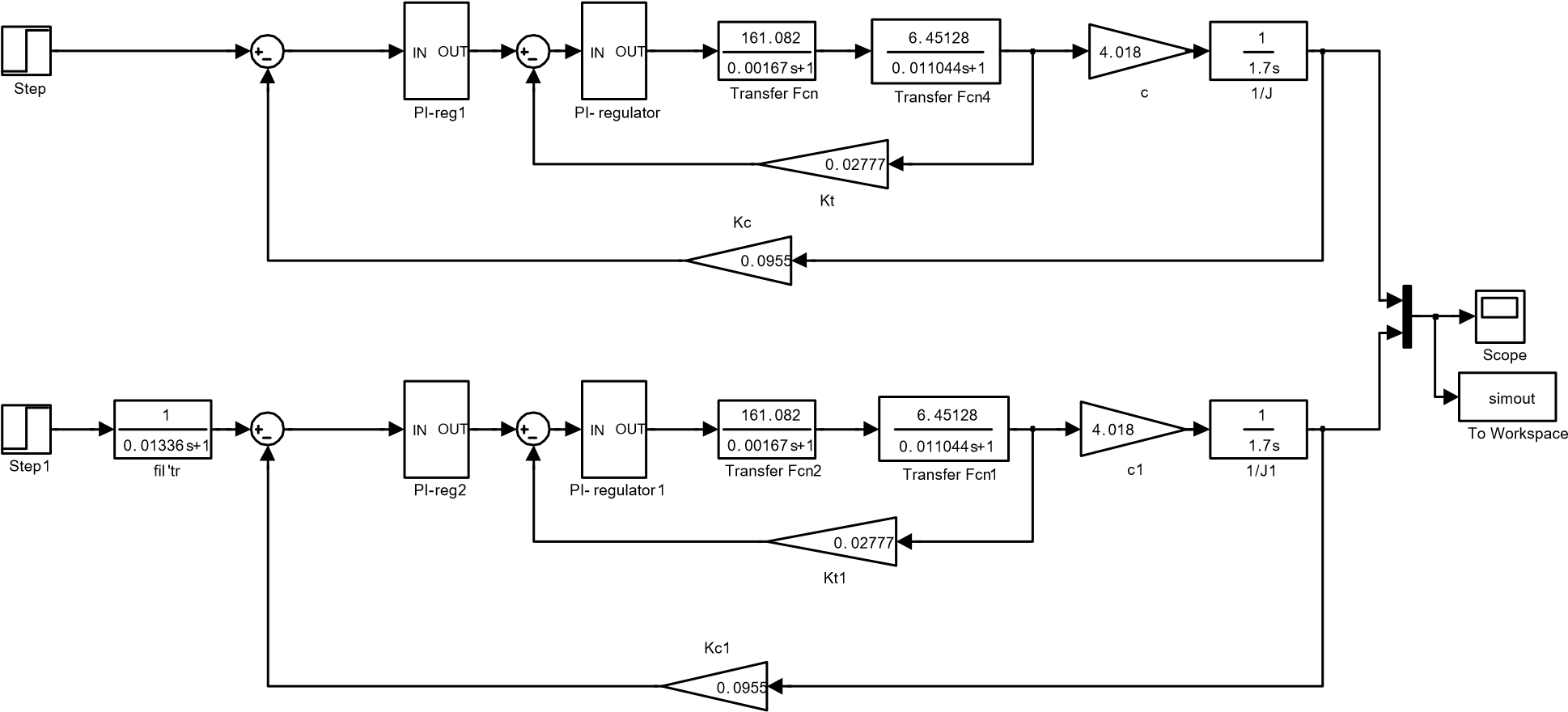
Рисунок 3. 8 – 1) Имитационная модель контура скорости 2) ПИ-регулятор скорости
Результаты моделирования переходных процессов в контуре скорости, настроенного на симметричный оптимум, при отработке ступенчатого входного воздействия приведены в виде переходных характеристик на рисунке 3.9 .
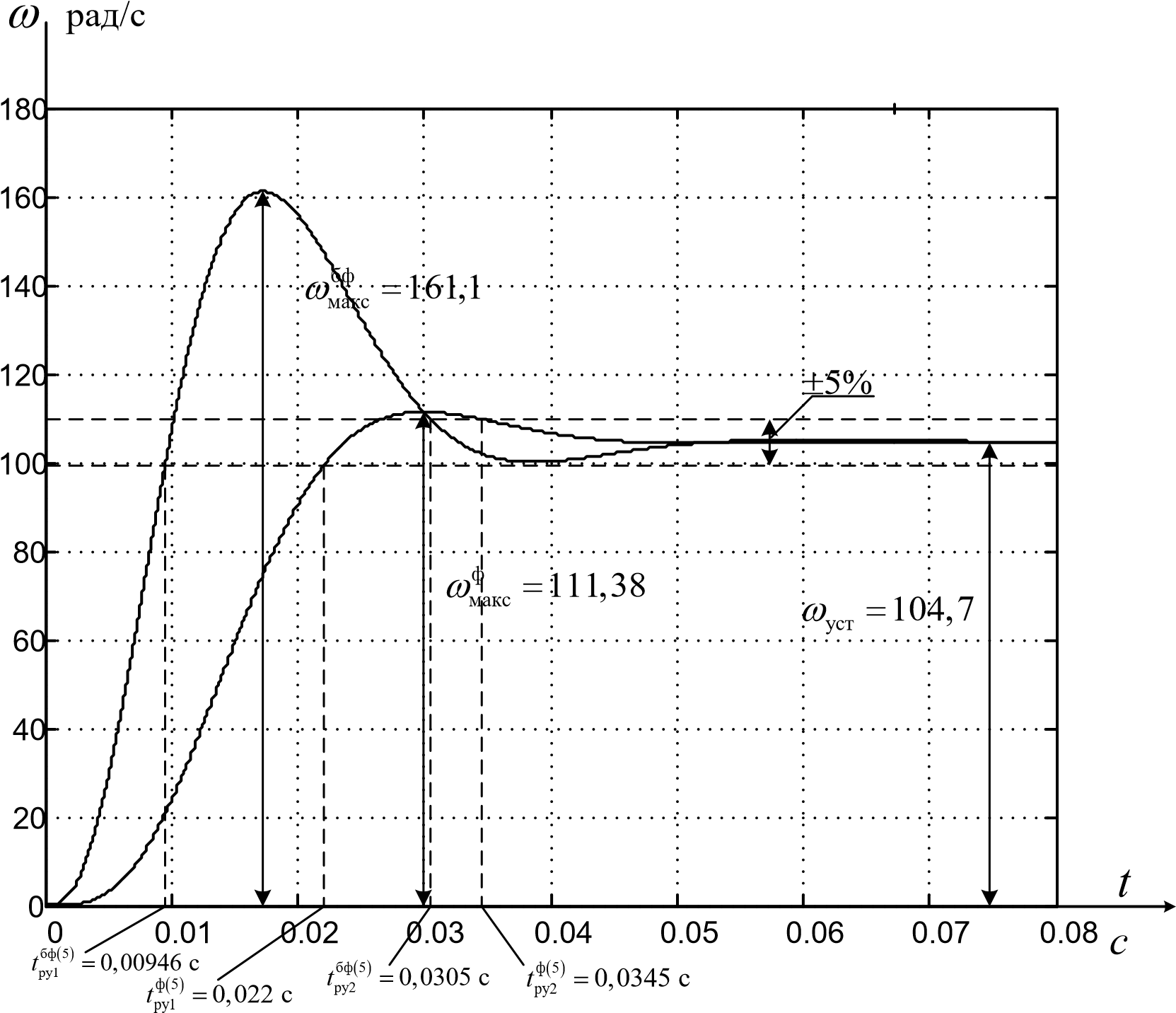
Рисунок 3.9 – Переходные характеристики (t) контура скорости
настроенного на СО: 1 – (t) без входного фильтра; 2 – (t) с фильтром на входе контура
По переходной характеристике (t)были определены следующие показатели:
tру15ф 0.022 с – время первого согласования (с фильтром);
tру25ф 0.0345 с –время переходного процесса (с фильтром);
tру15бф 0.00946 с – время первого согласования (без фильтра);
tру25бф 0.0305 с –время переходного процесса (без фильтра);
максф 111.381
 рад – максимальное значение скорости (с фильтром); с
рад – максимальное значение скорости (с фильтром); суст 104.7
 рад – установившееся значение скорости; с
рад – установившееся значение скорости; с фмакс уст 111,381 104,7
ф
 100%
100%  100 % 6.38 % уст 104,7
100 % 6.38 % уст 104,7 бфмакс уст 161,1 104,7
бф
 100% 100 % 53.86 % – уст 104.7
100% 100 % 53.86 % – уст 104.7– перерегулирование.
Анализ полученных результатов моделирования контура скорости (с фильтром), настроенного на симметричный оптимум показывает, что они практически не отличаются друг от друга. Небольшая разница экспериментальных и ожидаемых показателей связана с неточностью обработки графиков. Установившаяся ошибка при настройке контура скорости по СО Δωу.уст=0, следовательно этот контур обладает астатизмом первого порядка по управлению.
3.5. Оптимизация контура положения
Для обеспечения точного останова подъемного механизма в крайнем верхнем и нижнем положениях реализуется дополнительный контур регулирования по высоте подъема. Для его реализации необходим датчик положения (высоты подъема). Импульсный датчик положения установлен на валу барабана. Структурная схема представлена на рисунке 3.19.
Н
 Н, м
Н, мРисунок 3.10 – Структурная схема контура положения.
На входе контура скорости установлен S-образный задатчик интенсивности скорости с постоянной времени задатчика Тзи=2с. Представим задатчик интенсивности инерционным звеном первого порядка с передаточной функцией
1
W p зи
 ,
,зи p+1
где
Тзи Vслмакс 2 0 ,2
 зи 0,1330,1с
зи 0,1330,1с Vмакс 3 4 3 4
-
постоянная времени задатчика интенсивности;
Vслмакс 0,2V
макс
-
принятое максимальное значение скорости подъема (спуска) в следящем режиме, м/с.
Параметры звеньев контура положения:
 Uзс.макс 10 В с
Uзс.макс 10 В сkс 0,0955
 – коэффициент обратной связи по эп.макс 104,72 рад
– коэффициент обратной связи по эп.макс 104,72 радскорости;
Тсэ 3,34 10 3с – малая постоянная времени контура скорости;
 Dб 0,6290,786 м
Dб 0,6290,786 мkм 0,000170,000215
 – 2iпол iред 2 10 182,56 рад
– 2iпол iред 2 10 182,56 радкоэффициент передачи механизма;
nдп полi 1000 10 дискрет
 kдп 5063,14 4051,8
kдп 5063,14 4051,8  –
– Dб 3,140,6290,786 м
коэффициент передачи датчика положения, установленного на валу барабана
;
– число импульсов датчика положения на один оборот вала.
Передаточная функция П-регулятора положения
Wрп ( )р kрп.
Задатчик интенсивности остается в контуре положения. Следовательно, коэффициент усиления регулятора положения находится по выражению
k
 с kPП k k aм дп п Тμпэ
с kPП k k aм дп п Тμпэ0,0955
 0,2447 0,2418 ,
0,2447 0,2418 , 0,00017 0,0002155063,14 4051,84 0,11336 где
Тμпэ b a Тс с μсэ зи 2 2 3,34 10 3 0,1330,1 0,146360,11336с
-
эквивалентная малая постоянная времени контура положения с задатчиком интенсивности скорости.
ап 4 – коэффициент оптимизации контура положения по ЛО.
Оптимизированный контур имеет следующие передаточные функции:
-
разомкнутого контура с задатчиком скорости
1

-
p п.раз aпТпэpзиp+1b a Тc с2 3сэp3 b a Тc с2 2сэp2 b a Тc c сэp+1
1

2 0,45344 p 0,1 p +12,98 10 7 p3 8,92 10 5 p2 0,01336 p +1
-
замкнутого контура с задатчиком скорости по управлению
1/kп

-
p п.раз aпТпэpзиp+1b a Тc с2 3сэp3 b a Тc с2 2сэp2 b a Тc c сэp+11
1/5063,14

1)
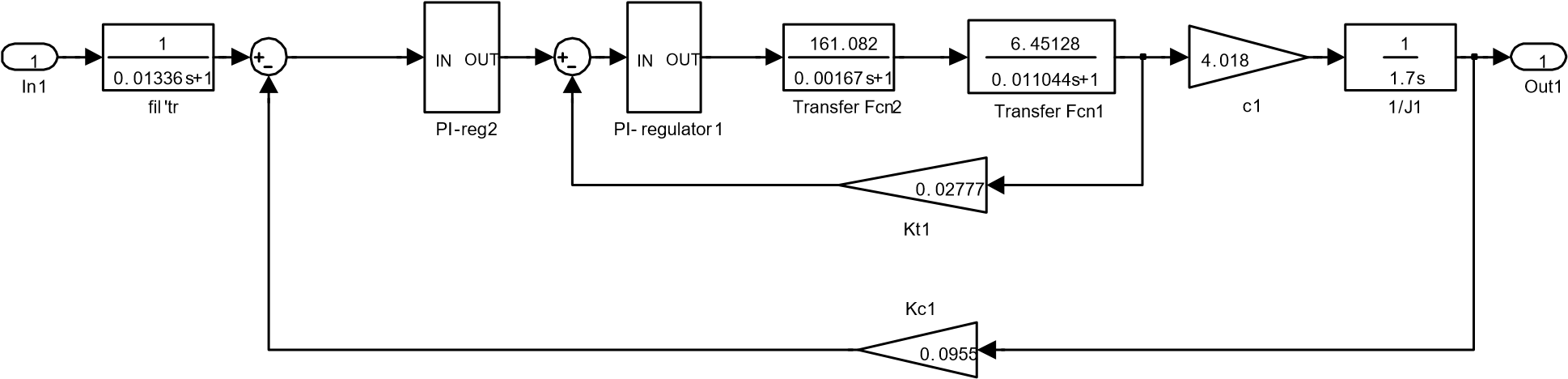
2)
Рисунок 3.11. – 1)Имитационная модель контура положения 2) Модель контура скорости на СО, входящая в контур положения
Замкнутый контур положения представляет собой астатическую систему
1-го порядка по управлению и обеспечивает равную нулю статическую ошибку при постоянном значении задающего сигнала V=0 и равное нулю перерегулирование при отработке ступенчатого задания.
4.ИССЛЕДОВАНИЕ НЕЛИНЕЙНОЙ САУ ДОПОЛНИТЕЛЬНОГО
ЭЛЕКТРОПРИВОДА БУРОВОЙ ЛЕБЕДКИ
4.1 Основные нелинейности САУ дополнительного электропривода
буровой лебедки
-
насыщение регулятора скорости Uрс.макс≤(10÷12) В, принимаем
Uрс.макс=10 В;
-
насыщение регулятора тока Uрт.макс≤(10÷12) В. Принимаем Uрт.макс=10 В; -
характеристика устройства постоянного токоограничения, реализованного путем ограничения выходного напряжения регулятора скорости
Uрс Uрсдоп ,
где Uрсдоп kт Iэпмакс 0.02777 360 9.9972 В; примем Uрсдоп 10 В
-
ограничение угла управления тиристорного преобразователя, которое учитывается ограничением ЭДС преобразователя
Eтп.макс Ed0 cosмин 513cos10 505.206 В.;
-
активный характер нагрузки
Мс Мс ;
-
нелинейный характер регулировочной характеристики реверсивного тиристорного преобразователя с линейным опорным напряжением.
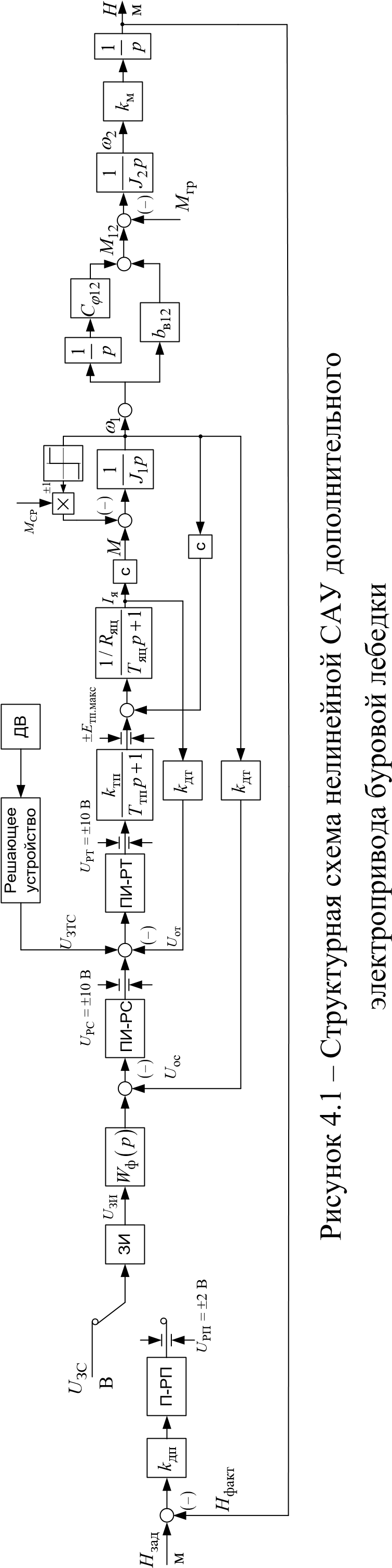
4.2 Структурная схема нелинейной САУ дополнительного
электропривода буровой лебедки
Структурная схема нелинейной САУ главного электропривода буровой лебедки представлена на рисунке 4.1.
4.3. Имитационная модель нелинейной САУ дополнительного
электропривода буровой лебедки
На основании структурной схемы (рисунок 4.1) в пакете Simulink системы MATLAB R2007a разработана имитационная модель нелинейной САУ
дополнительного электропривода буровой лебедки:
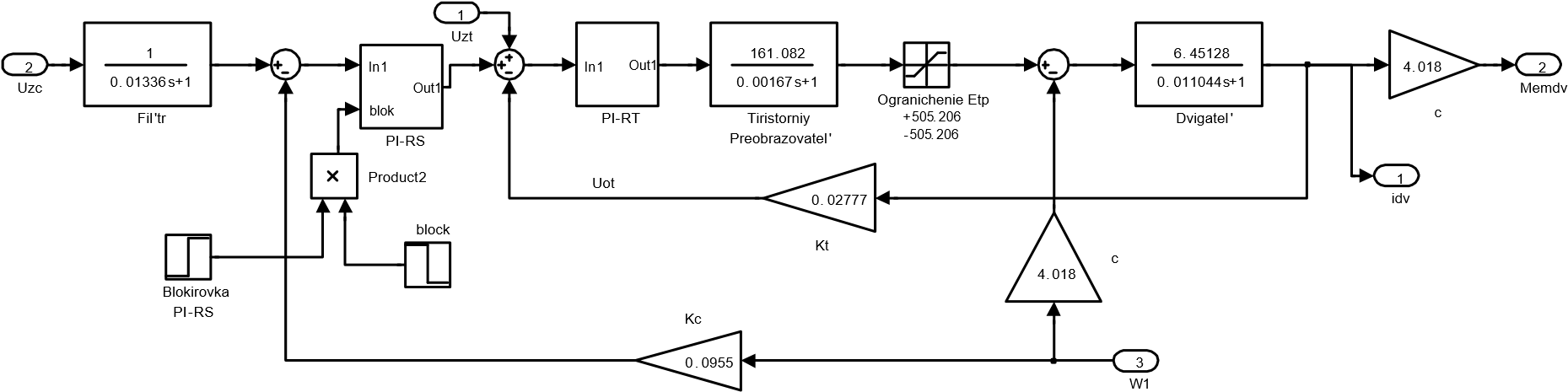
Имитационная модель регулируемого электропривода представлена на рисунке 4.2:

REP
а)
б)
Рисунок 4.2 – Имитационная модель РЭП:
а) – суперблок; б)– схема набора модели
На рисунках 4.3, 4.4 представлены имитационные модели ПИ-регулятора скорости и ПИ-регулятора тока.

PI-RS
а)
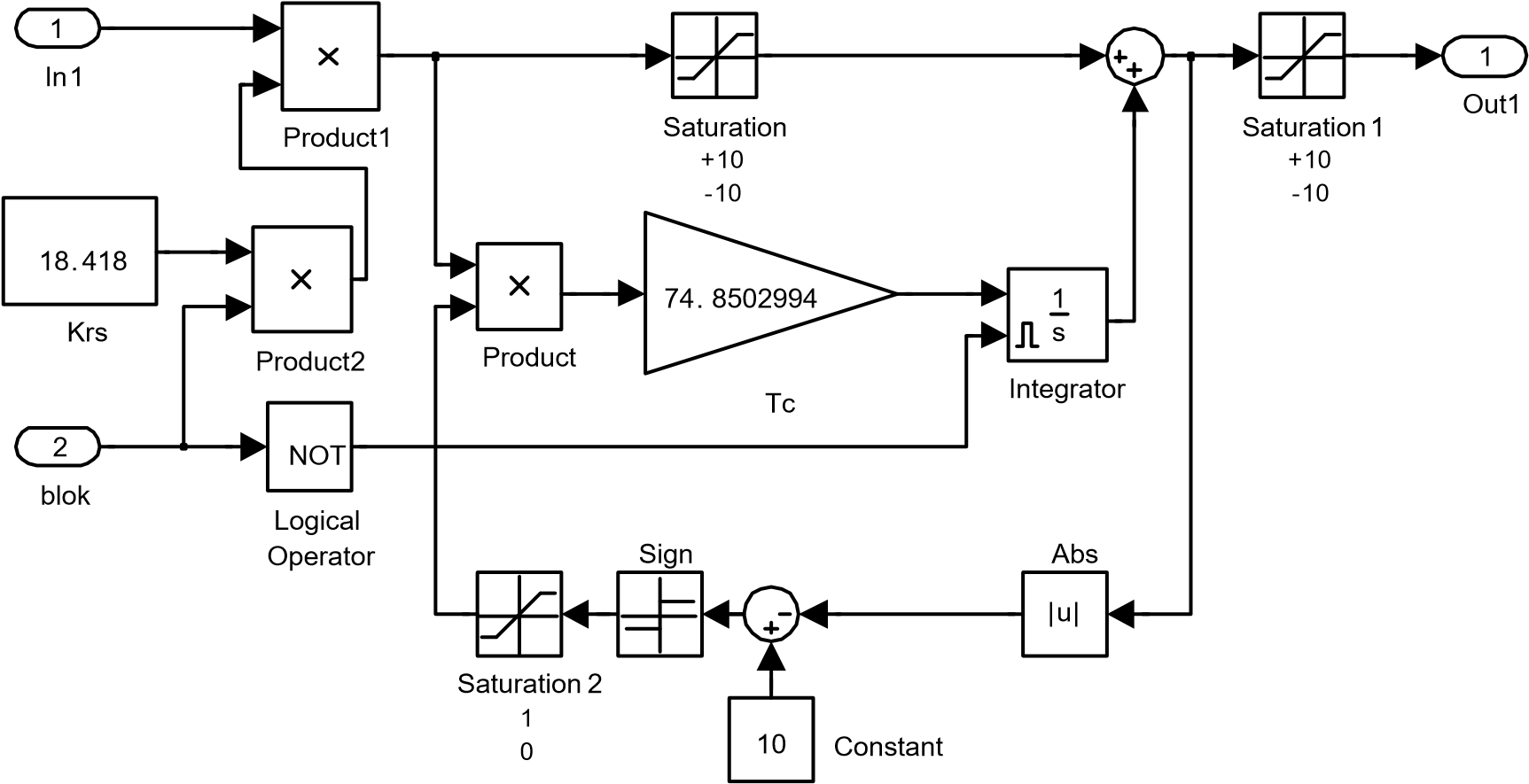
б)
Рисунок 4.31 – Имитационная модель ПИ–регулятора скорости с постоянным ограничением: а) – суперблок; б)– схема набора модели