ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 07.11.2023
Просмотров: 627
Скачиваний: 4
СОДЕРЖАНИЕ
1. ОПИСАНИЕ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА
2.1. Кинематическая схема механизма
2.2 Выбор электродвигателя, расчет параметров
2.3. Механическая система дополнительного электропривода
2.4 Выбор тиристорного преобразователя, расчет параметров
Необходимое значение полного сопротивления обмотки фазы реактора
2.5 Определение параметров тиристорного преобразователя
2.6 Расчет параметров якорной цепи привода
2.7 Определение области допустимой работы дополнительного
электропривода подъемной лебедки
2.8 Структурная схема силового канала дополнительного
электропривода подъемной лебедки
3. ОПТИМИЗАЦИЯ ЛИНЕАРИЗОВАННОЙ САУ
ДОПОЛНИТЕЛЬНОГО ЭЛЕКТРОПРИВОДА БУРОВОЙ ЛЕБЕДКИ
3.1 Функциональная схема дополнительного электропривода буровой
3.2 Структурная схема САУ электропривода РПД
3.3 Оптимизация контура тока якоря
3.4. Оптимизация контура скорости
3.5. Оптимизация контура положения
4.ИССЛЕДОВАНИЕ НЕЛИНЕЙНОЙ САУ ДОПОЛНИТЕЛЬНОГО
ЭЛЕКТРОПРИВОДА БУРОВОЙ ЛЕБЕДКИ
4.1 Основные нелинейности САУ дополнительного электропривода
4.2 Структурная схема нелинейной САУ дополнительного
электропривода буровой лебедки
4.3. Имитационная модель нелинейной САУ дополнительного
электропривода буровой лебедки
4.4. Исследование САУ дополнительного электропривода буровой лебедки на имитационной модели
ЗАДАНИЕ ДЛЯ РАЗДЕЛА «ФИНАНСОВЫЙ МЕНЕДЖМЕНТ,
РЕСУРСОЭФФЕКТИВНОСТЬ И РЕСУРСОСБЕРЕЖЕНИЕ»
5 ФИНАНСОВЫЙ МЕНЕДЖМЕНТ, РЕСУРСОЭФФЕКТИВНОСТЬ
5.1 Анализ конкурентных технических решений
5.2 Планирование научно-исследовательских работ
5.3 Определение ресурсоэффективности исследования
ЗАДАНИЕ ДЛЯ РАЗДЕЛА «СОЦИАЛЬНАЯ ОТВЕТСТВЕННОСТЬ»
6.1 Правовые и организационные вопросы обеспечения безопасности
6.2 Производственная безопасность
6.3 Экологическая безопасность
1. Подъем из нижнего положения (натяжение канатов, выход на максимальную скорость, переход в следящий режим, точная остановка, наложение тормозов):
-
без колонны (только крюк). -
при максимальной массе колонны;
Результаты исследований приведены на рисунках 4.15, 4.16 соответственно.
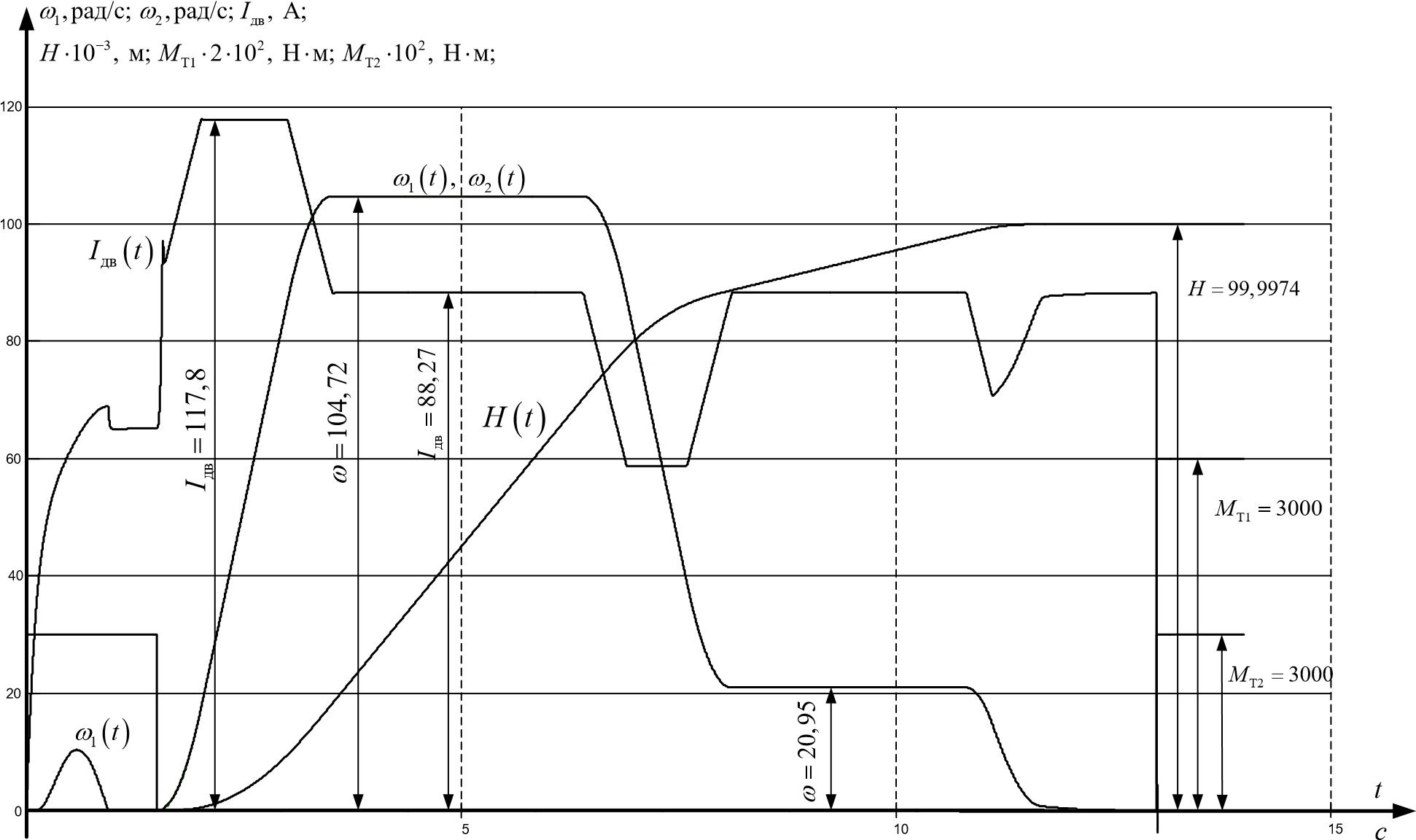
Рисунок 4.15 – Процесс подъема из нижнего положения без колонны
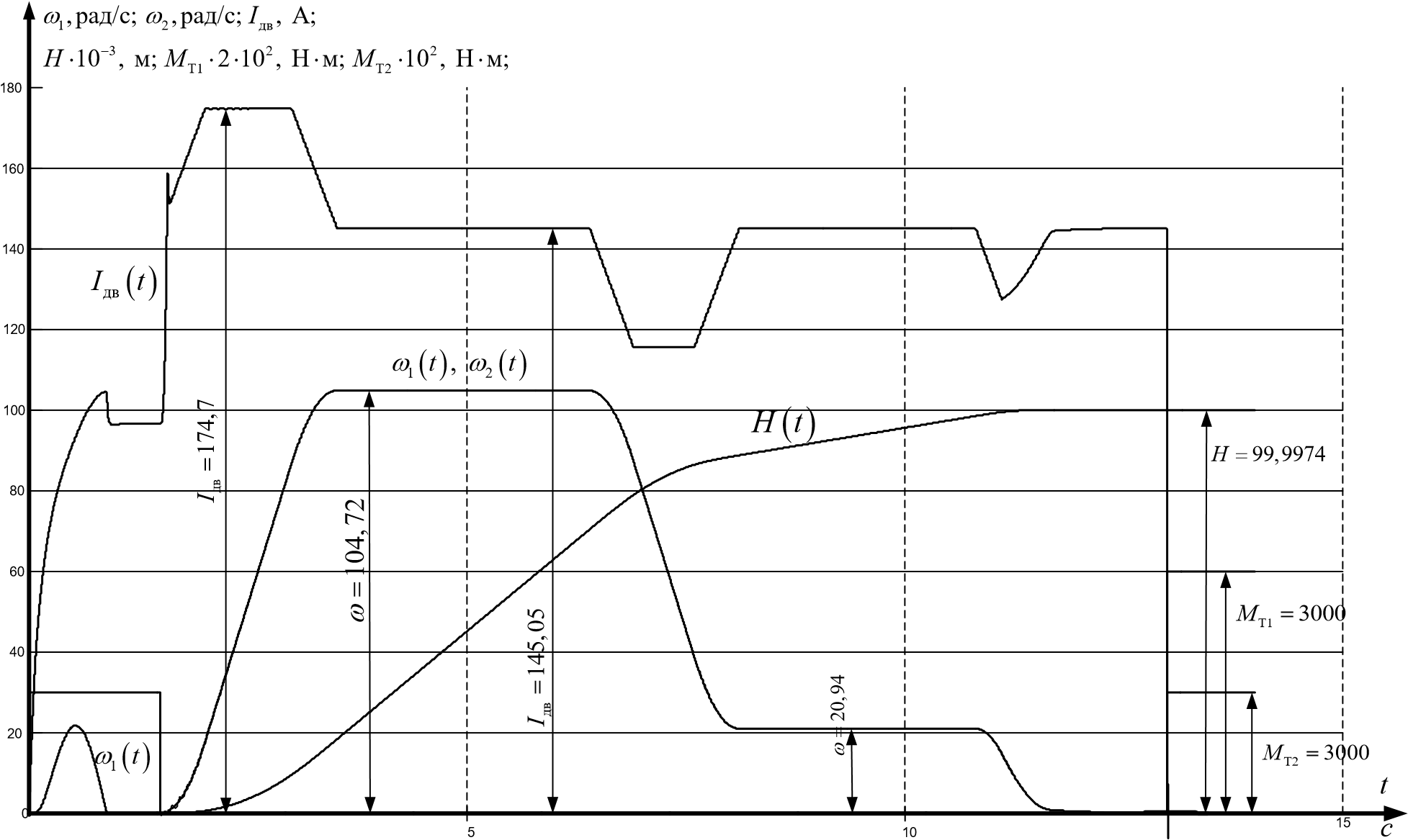
Рисунок 4.16 – Процесс подъема из нижнего положения при максимальном весе колонны
На период времени с подается статическое задание на ток, при этом ПИрегулятор скорости находится в заблокированном состоянии и заторможена вторая масса тормозом МТ2. Вследствие этого происходит изменение первой скорости, что способствует натяжению канатов. В момент времени t=1,5с вторая масса растормаживается, и ПИ-регулятор скорости разблокирован, что приводит к тому, что электропривод начинает разгоняться до номинальной скорости, и начинается подъем колонны. По мере приближения к заданному положению включается следящий контур, и скорость снижается до значения ограничения регулятора положения. Контур положения обеспечивает точную остановку в заданном положении. После остановки электропривода снимается статическое задание на ток UЗТС, блокируется регулятор скорости и накладываются тормоза
МТ1 и МТ2.
2. Спуск из верхнего положения (натяжение канатов, выход на максимальную скорость, переход в следящий режим, точная остановка, наложение тормозов):
-
без колонны (только крюк). -
при максимальной массе колонны;
Результаты исследований приведены на рисунках 4.17, 4.18 соответственно.
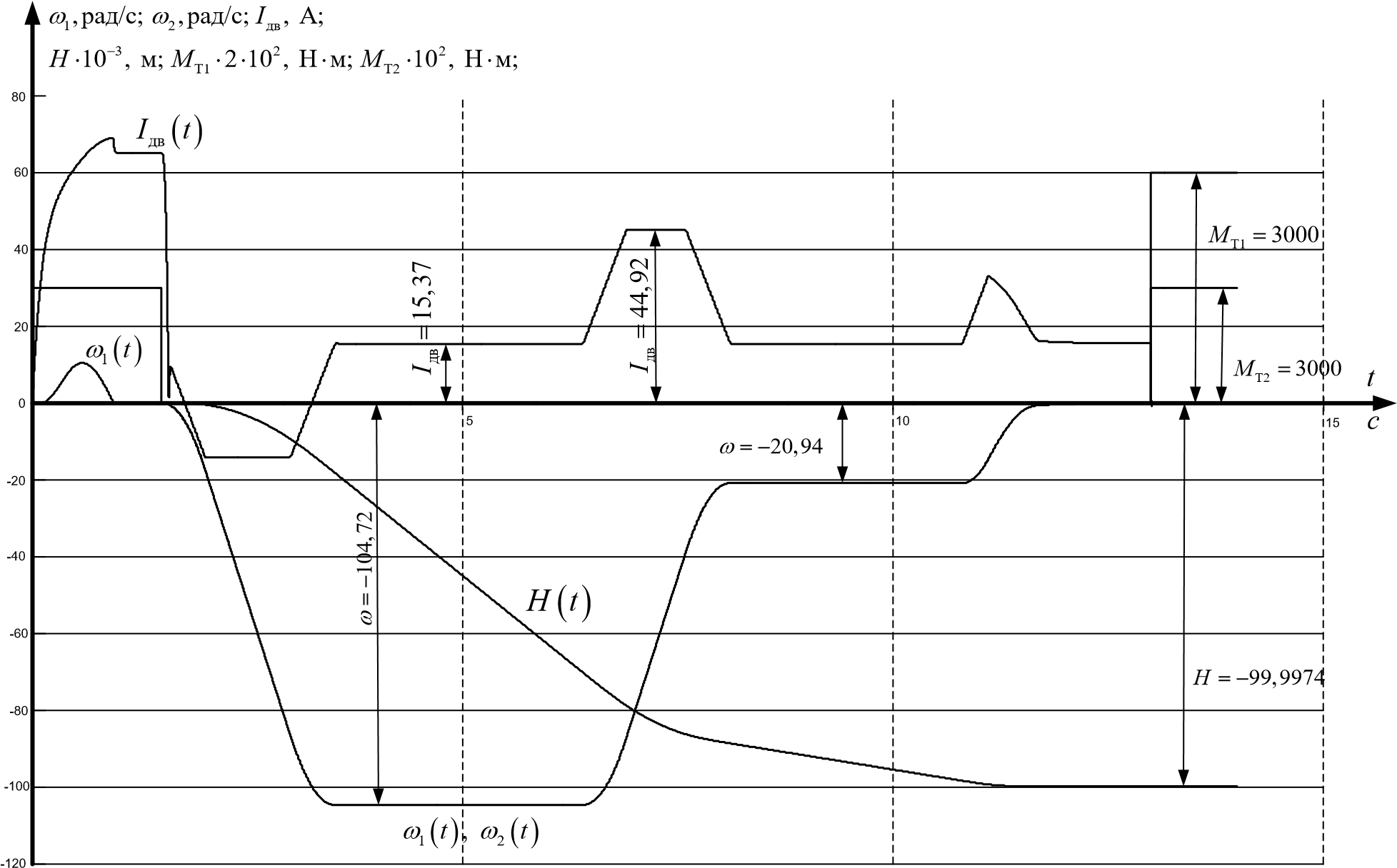
Рисунок 4.17 – Процесс спуска из верхнего положения без колонны
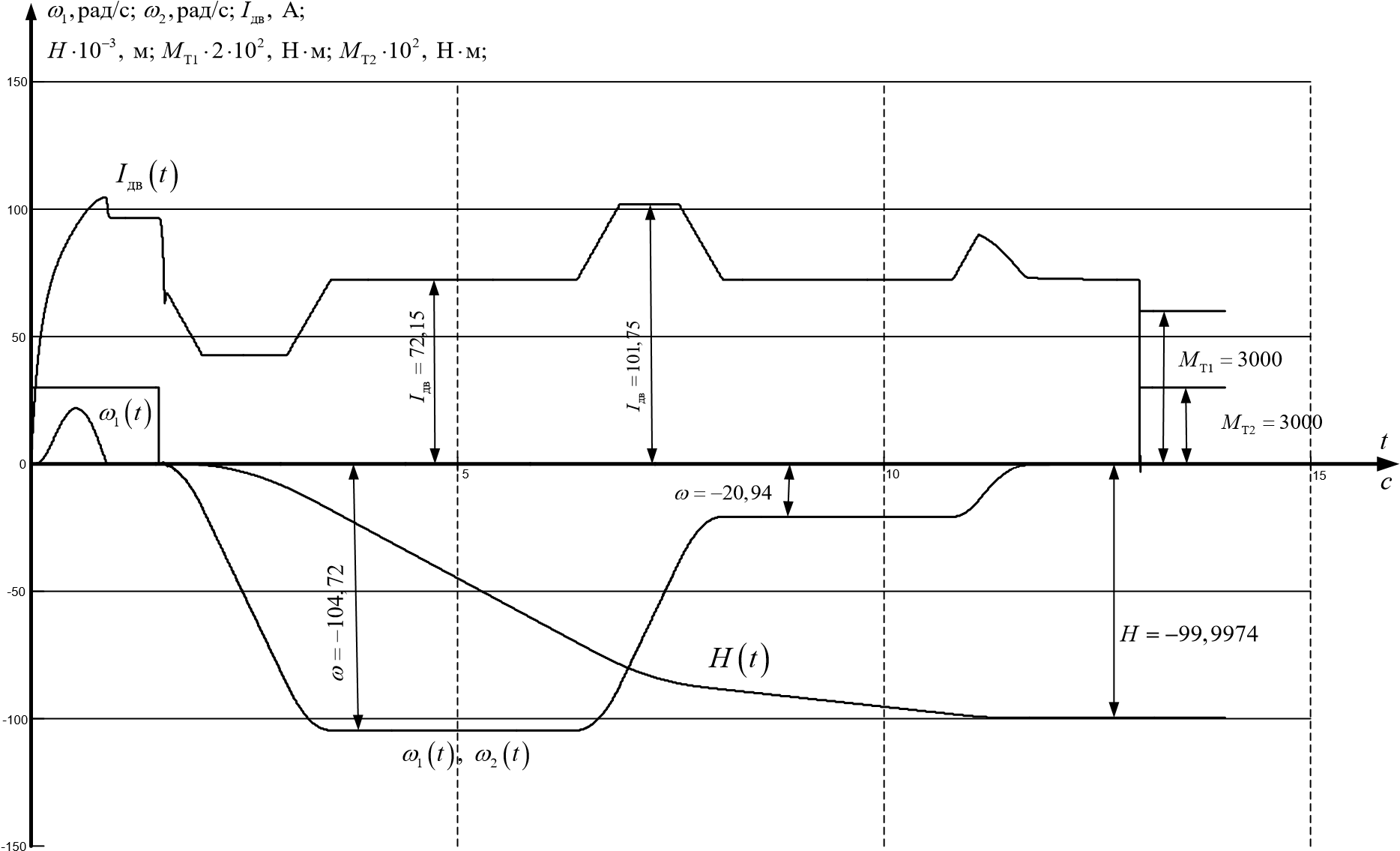
Рисунок 4.18 – Процесс спуска из верхнего положения при максимальном весе колонны
Процесс спуска осуществляется аналогично процессу подъема. Как можно увидеть по графикам в начальный момент времени происходит натяжение канатов. Далее электропривод выходит на номинальную скорость, затем по мере приближения к заданному положению включается следящий контур, и скорость снижается до значения ограничения регулятора положения. Контур положения обеспечивает точную остановку в заданном положении. После остановки электропривода снимается статическое задание на ток U
ЗТС, блокируется регулятор скорости и накладываются тормоза МТ1 и МТ2.
Исходя из полученных результатов, можно сделать вывод, что заданное положение отрабатывается полностью при спуско-подъемных операциях, ток якорной цепи не превышает номинальный, время разгона и торможения соответствует требованиям технологического процесса.
4.4.2. Исследование САУ дополнительного электропривода буровой лебедки в режиме подачи долота при бурении
В режиме регулятора подачи долота (РПД) изменяется структура САУ дополнительного электропривода буровой лебедки. Структурная схема САУ дополнительного электропривода в режиме регулятора подачи долота приведена на рисунке 4.19.
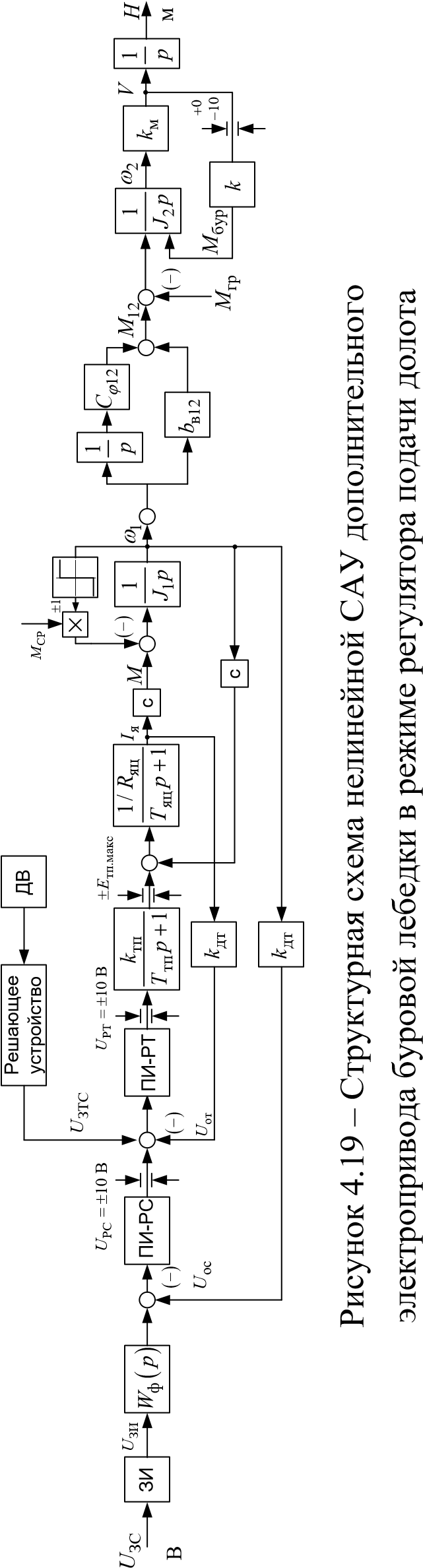
Особенности работы в режиме бурения
В процессе бурения дополнительная подъёмная лебедка осуществляет поддержание колонны труб с таким усилием, что создается давление на буровой инструмент, обеспечивающее требуемое значение скорости бурения.
Возможно два режима работы вспомогательной лебедки в режиме бурения:
-
задается значение момента двигателя Mдв (давление на буровой инструмент), скорость электропривода лебедки дв(скорость бурения Vбур ) при этом будет определяться зависимостью Mдвдопдв; -
задается скорость электропривода лебедки дв(скорость бурения Vбур), если окажется, что при этом момент двигателя (давление на буровой инструмент) превышает допустимое значение, то скорость привода снижается до значения, соответствующего предельной зависимости Mдвдопдв.
Программа исследований электропривода дополнительной лебедки в режиме бурения
-
Работа на подъем колонны труб. Удерживается колонна труб, производится выбор слабины канатов, натяжение канатов, создание удерживающего момента на валу второй массы в режиме блокированного регулятора скорости. -
Режим управления 1. Освобождается колонна труб, колонна удерживается лебедкой (канаты натянуты), при блокированном регуляторе скорости уменьшается задание на входе контура тока до величины, обеспечивающей требуемое давление на буровой инструмент. Электропривод должен удерживать заданное давление, а скорость бурения будет зависеть от фактического сопротивления при бурении. -
Режим управления 2. Освобождается колонна труб, колонна удерживается лебедкой (канаты натянуты), разблокируется регулятор скорости и на вход контура скорости подается задание требуемой скорости бурения (спуска колонны). Электропривод в процессе бурения должен опускать колонну с заданной скоростью или с меньшей скоростью, соответствующей предельной зависимости Mдвдопдв. -
По результатам исследований принять решение о выборе варианта управления приводом лебедки в процессе бурения и проверить его работу.
Результаты исследований
I. Регулирование статического задания на ток UЗТС
Имитационная модель данного метода приведена на рисунке 4.20.
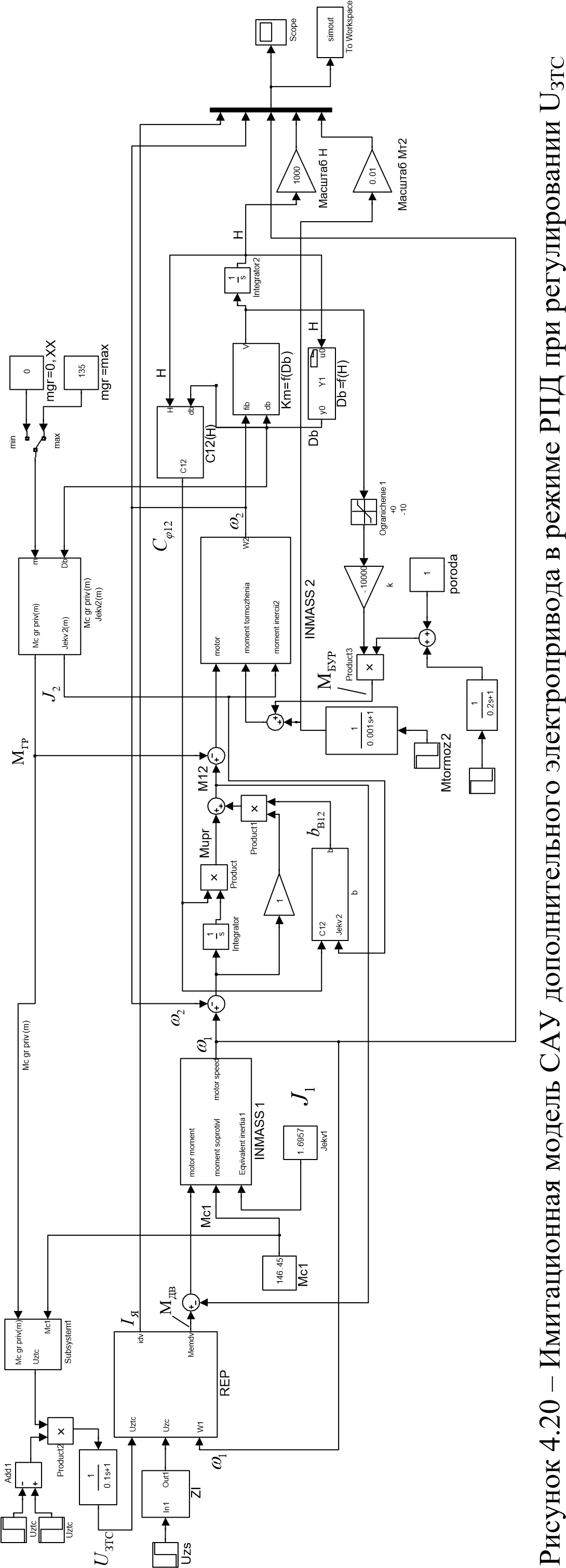
Результаты исследований приведены на рисунке 4.21.
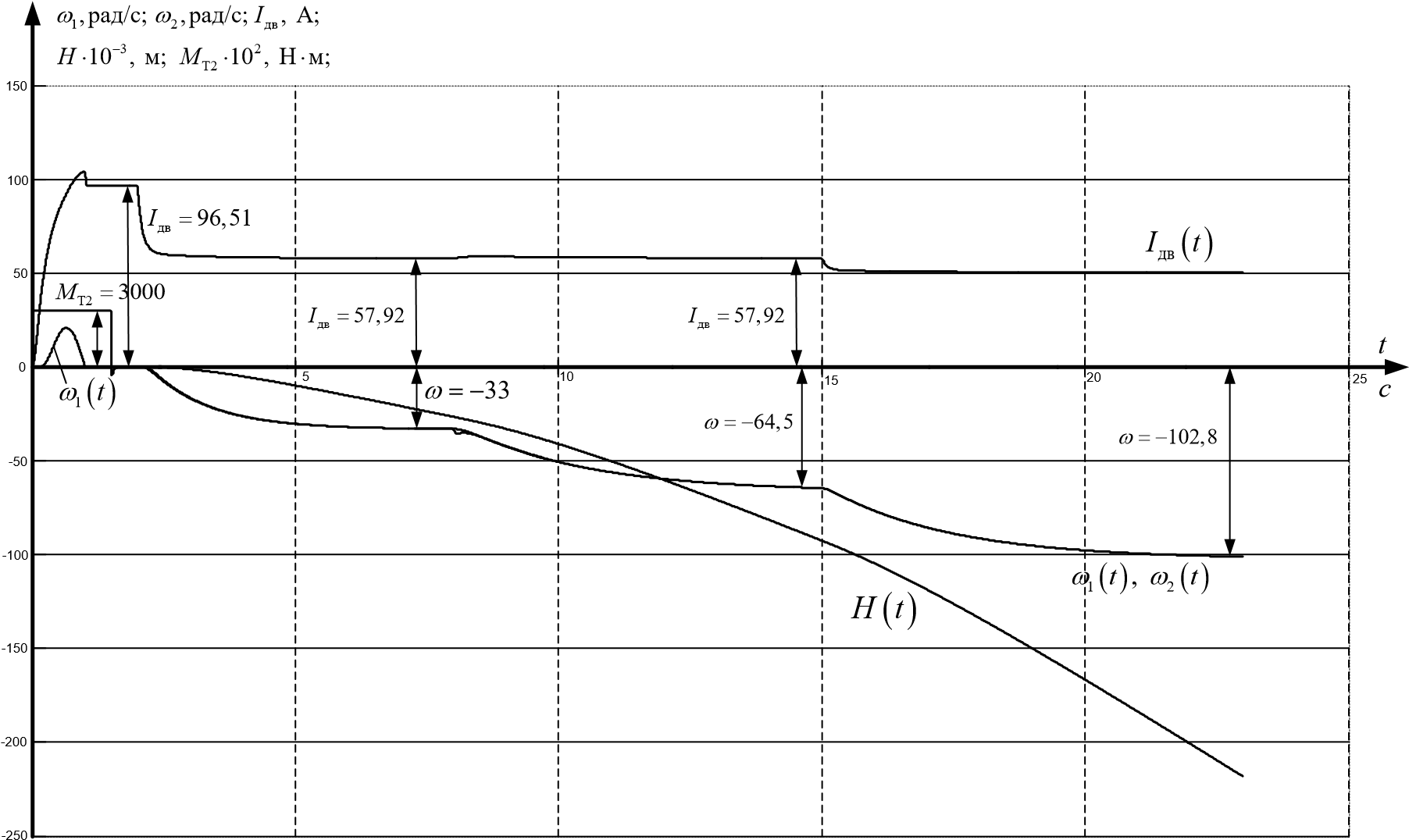
Рисунок 4.21 – Процесс бурения при регулировании UЗТС На протяжении всего процесса бурения ПИ-регулятор скорости заблокирован. На участке от 0 до 1,5 с происходит натяжение канатов (первая скорость нарастает), т.к. вторая масса заторможена и подается статическое задание на ток UЗТС. В момент времени t=1,5с сбрасывается тормоз со второй массы. Далее в момент времени t=2с снижается статическое задание на ток 0,6UЗТС, вследствие этого колона начинает опускать на забой и осуществляется процесс бурения, скорость устанавливается -33 рад/с. В момент временя t=8с состав породы меняется с твердой на более рыхлую и за счет этого происходит увеличение скорости до -64,5 рад/с. В момент времени t=15с т.к. порода рыхлая есть возможность бурения на более высокой скорости, поэтому статическое задание на ток увеличивает и скорость возрастает до -102,8 рад/с
Недостатком такого метода является то, что нельзя получить желаемой скорости бурения. Скорость бурения зависит от величины статического задания на ток UЗТС.
II. Регулирование задания на скорость UЗС
Имитационная модель данного метода приведена на рисунке 4.22.
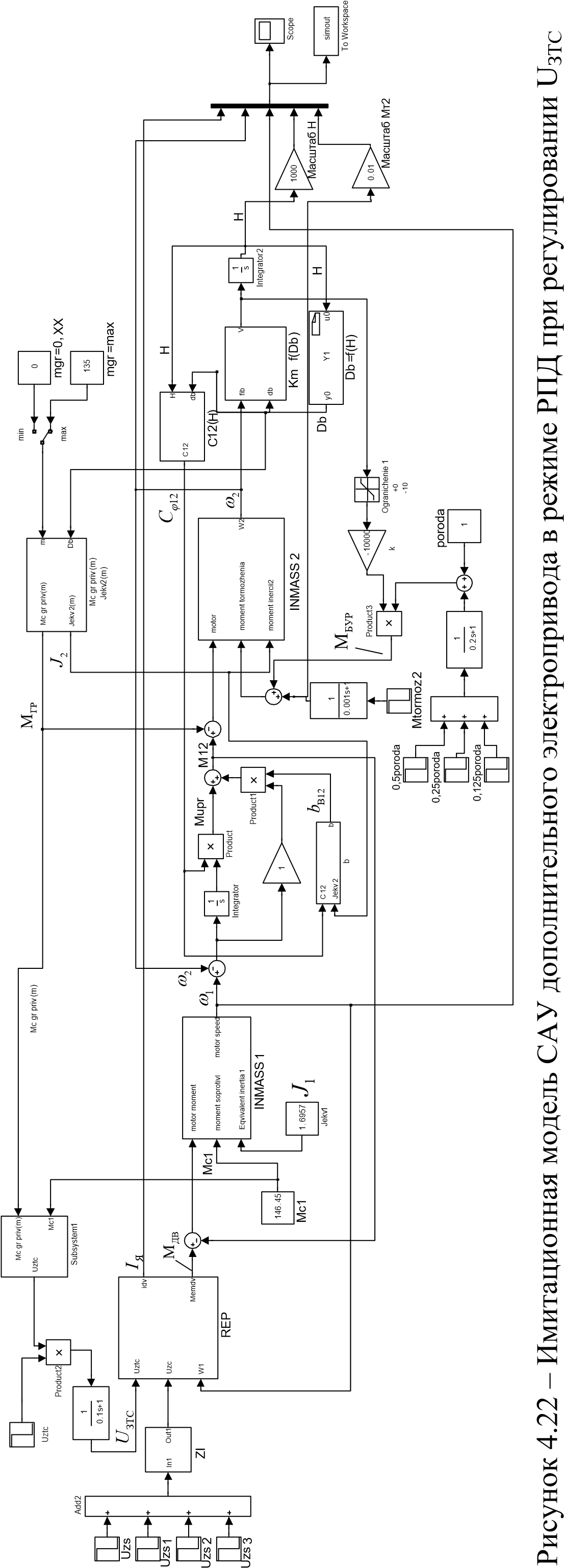
Этом метод реализован с ПИ-регулятором с управляемым ограничением, которое зависит от статического задания на ток UЗТС (UРСмакс UЗТС) .
Результаты исследований приведены на рисунке 4.23.
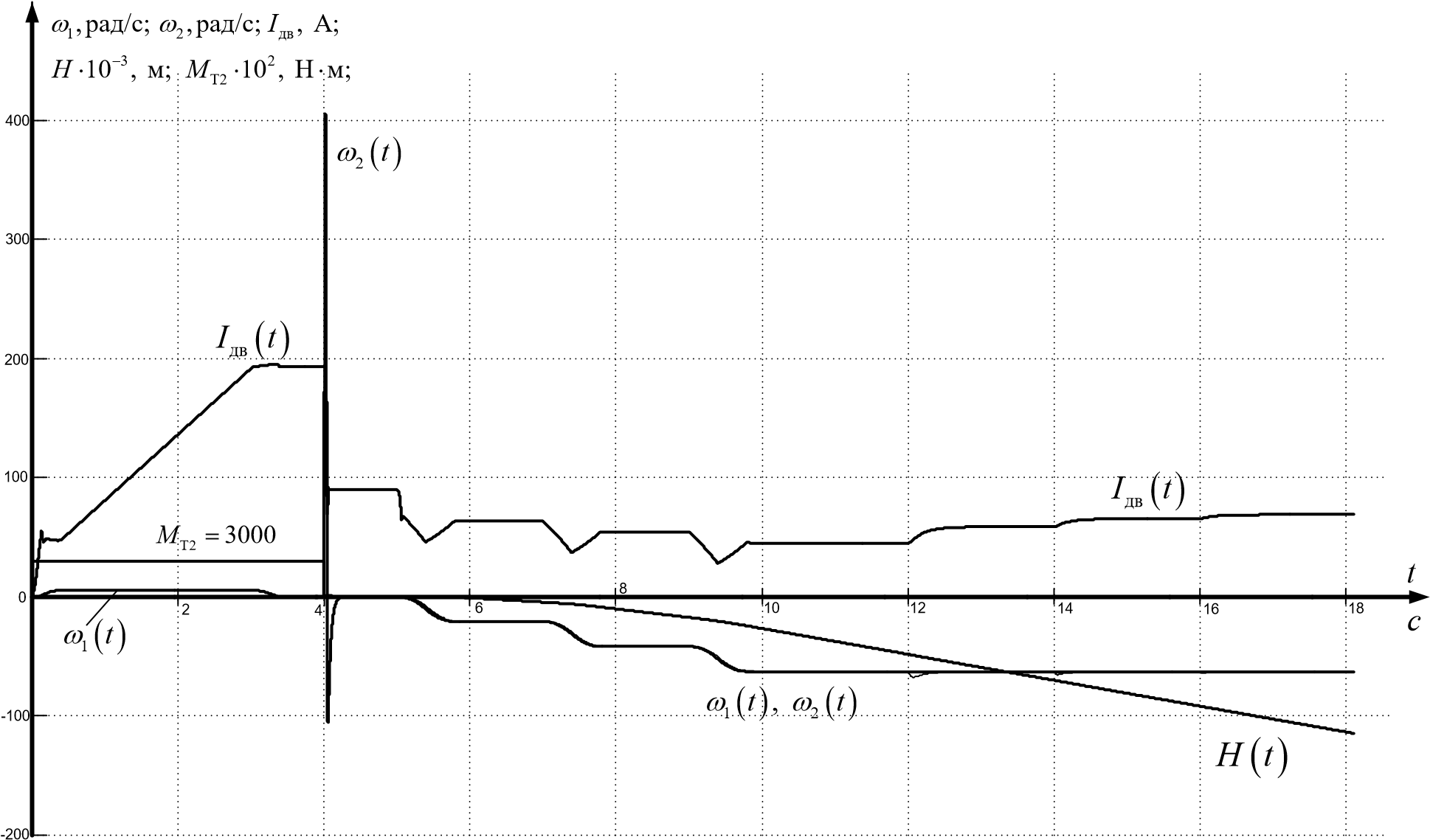
Рисунок 4.23 – Процесс бурения при регулировании UЗС
На протяжении всего процесса ПИ-регулятор скорости заблокирован, В начальный момент наложен тормоз на вторую массу МТ2 и подано статическое задание на ток UЗТС. Происходит натяжение канатов. В момент времени t=4с сбрасывается тормоз со второй массы, в результате чего происходит скачкообразное изменение второй скорости из-за существующего момента трения. Далее в момент времени t=5с подается задание на скорость U
ЗС равное 2В, в результате чего колона начинает движение и скорость устанавливается соответствующая заданию UЗС. В последующем дважды увеличивается задание на скорость и скорость устанавливается соответствующая этим заданиям. В момент времени t=10с состав породы меняется, но это не приводит к изменению скорости и процесс бурения продолжает протекать с постоянной скорость.
Поскольку в первом методе мы не можем получить желаемой скорости бурения, а во втором методе после снятия тормоза происходит скачкообразное изменение скорости, то есть необходимость использования комбинированного метода. Он заключается в том, что в начальный момент времени ПИ-регулятор скорости заблокирован, а в момент после снятия тормоза со второй массы работает он с управляемым ограничением, которое зависит от статического задания на ток UЗТС (UРСмакс UЗТС ) .
Результаты исследований приведены на рисунке 4.24.
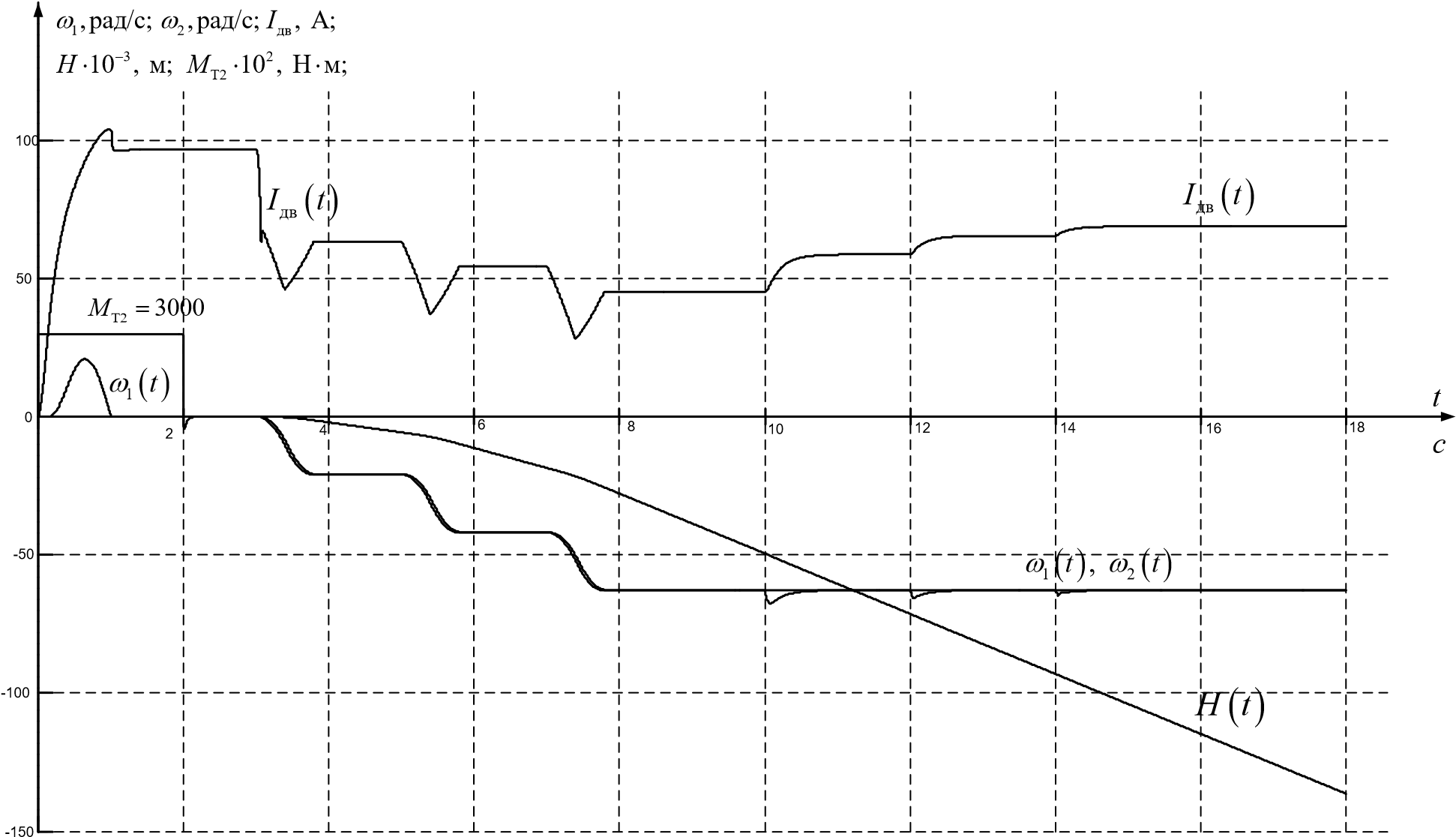
Рисунок 4.24 – Комбинированный метод
Исходя из полученных результатов, можно сделать вывод, что комбинированный метод осуществляет процесс бурения с возможность получения желаемой скорости бурения, и так же не происходит скачкообразного изменения второй скорости, что соответствует требованиям технологического процесса.
ЗАДАНИЕ ДЛЯ РАЗДЕЛА «ФИНАНСОВЫЙ МЕНЕДЖМЕНТ,
РЕСУРСОЭФФЕКТИВНОСТЬ И РЕСУРСОСБЕРЕЖЕНИЕ»
Студенту:
| Группа | ФИО |
| З-5Г5А1 | Эргашев Азиз Беркинович |
| Школа | ИШЭ | Отделение школы (НОЦ) | ЭПЭО |
| Уровень образования | Бакалавр | Направление/специальность | 13.03.02 Электроэнергетика и электротехника |
| Исходные данные к разделу «Финансовый менеджмент, ресурсоэффективность и ресурсосбережение»: | |
| 1.Стоимость ресурсов исследовательской работы (ИР): материально-технических, энергетических, финансовых, информационных и человеческих | Стоимость материальных ресурсов и специального оборудования определены в соответствии с рыночными ценами г. Томска. Тарифные ставки исполнителей определены штатным расписанием НИ ТПУ. |
| 2.Нормы и нормативы расходования ресурсов | Норма амортизационных отчислений на специальное оборудование |
| 3.Используемая система налогообложения, ставки налогов, отчислений, дисконтирования и кредитования | Отчисления во внебюджетные фонды 30 % |
| Перечень вопросов, подлежащих исследованию, проектированию и разработке: | |
| 1.Анализ конкурентных технических решений (ИР) | Расчет конкурентоспособности SWOT-анализ |
| 2.Формирование плана и графика разработки и внедрения (ИР) | Структура работ. Определение трудоемкости. Разработка графика проведения исследования. |
| 3.Составление бюджета инженерного проекта (ИР) | Расчет: Расчет бюджетной стоимости ИР по разработке электропривода подъемной лебедки буровой установки БУ 4500/270 ЭК-БМ |
| 4.Оценка ресурсной, финансовой, социальной, бюджетной эффективности (ИР) | Интегральный финансовый показатель. Интегральный показатель ресурсоэффективности. Интегральный показатель эффективности |
| Перечень графического материала (с точным указанием обязательных чертежей) | |
| |