Добавлен: 08.11.2023
Просмотров: 1477
Скачиваний: 6
СОДЕРЖАНИЕ
Проблема охраны территорий от малогабаритных БПЛА
Обзор известных методов решения проблемы
Постановка задачи проектирования системы управления охранного квадрокоптера
Характеристики центрального процессора (CPU)
Барометрический датчик давления
Электронный регулятор скорости (ESC)
Принцип работы датчика с оптическим потоком
Результат сборки квадрокоптера
Программная среда Robot Operating System
Алгоритм управления автономным полетом охранного квадрокоптера
Финансовый менеджмент, ресурсоэффективность и ресурсосбережение
Продолжительность этапов работ
Расчет сметы затрат на выполнение проекта
Расчет затрат на электроэнергию
Расчет затрат на социальный налог
Расчет прочих (накладных) расходов
Безопасность в чрезвычайных ситуациях
Особенности законодательного регулирования проектных решений
Список используемых источников
В результате анализа основных частей квадракоптера была разработана и представлена аппаратная архитектура автономно управляемого охранного квадрокоптера, которая показана на рисунке 2.1. Данная архитектура базируется на полетном контроллере Pixhawk 2.4.8 с автопилотом PX4. Такой выбор обоснован тем, что это самый доступный на сегодняшний день полетный контроллер и соответственно он имеет большое сообщество разработчиков, а также технические характеристики данного устройства удовлетворяют тем задачам, которые он выполняет.
Выбор комплектующих квадрокоптера рассмотрен ниже.
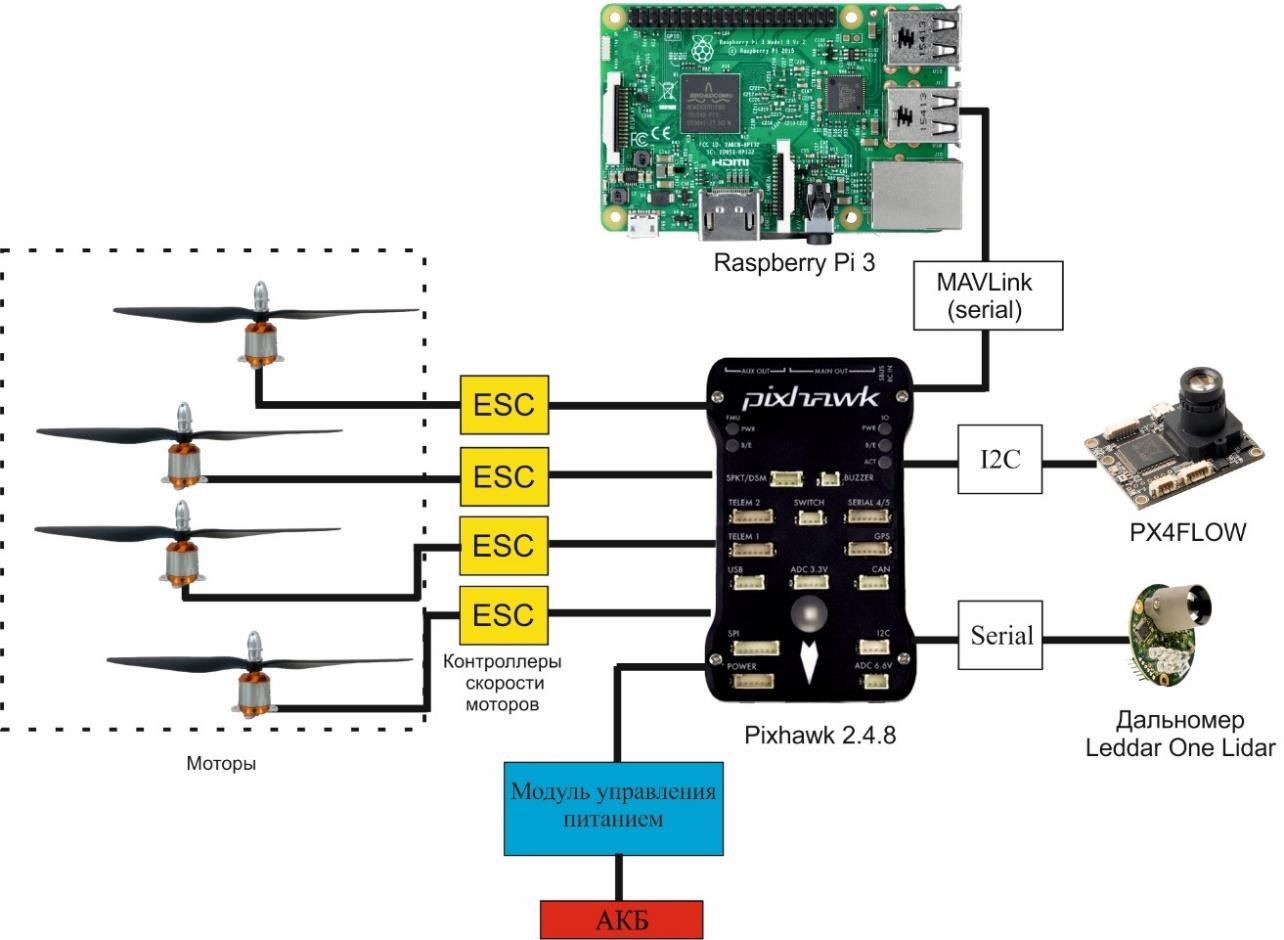
Рисунок 2.1 – Аппаратная архитектура автономно управляемого охранного квадрокоптера
В данной архитектуре представлены основные активные элементы конструкции квадрокоптера. Взаимодействие этих компонентов определяет поведение квадрокоптера.
Далее был сделан подбор компонентов для автономного охранного квадрокоптера. Данный выбор компонентов квадрокоптера обосновывается спецификой выполняемой задачи, а именно автономный облет территории и дальнейший сбор и обработка данных. Необходимо было выбрать конфигурацию, которая будет содержать все необходимые датчики для полета и далее, чтобы квадрокоптер мог быть запрограммирован и управляться подключенным микрокомпьютером. Выбранное решение
отвечает всем необходимым параметрам.
- 1 2 3 4 5 6 7 8 9 ... 35
Полетный контроллер
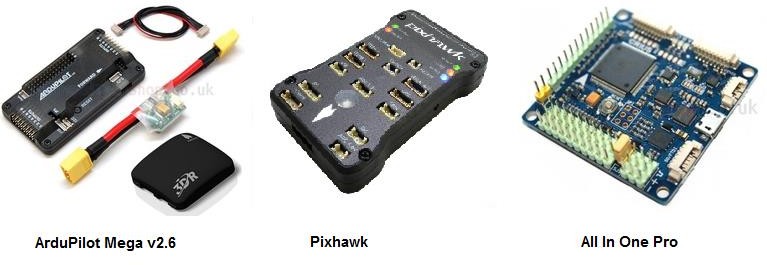 Квадрокоптер управляется с помощью полетного контроллера - это его координатор, который оснащен датчиками для определения движения аппарата. Контроллер использует данные с датчиков и алгоритмы для расчета скорости вращения каждого двигателя, чтобы квадрокоптер мог двигаться в нужном направлении. Это происходит потому, что пилот отдает команды с помощью пульта управления, а контроллер уже управляет моторами через ESC-контроллеры, используя ШИМ-модуляцию. На рисунке 2.2 представлены используемые полетные контроллеры.
Квадрокоптер управляется с помощью полетного контроллера - это его координатор, который оснащен датчиками для определения движения аппарата. Контроллер использует данные с датчиков и алгоритмы для расчета скорости вращения каждого двигателя, чтобы квадрокоптер мог двигаться в нужном направлении. Это происходит потому, что пилот отдает команды с помощью пульта управления, а контроллер уже управляет моторами через ESC-контроллеры, используя ШИМ-модуляцию. На рисунке 2.2 представлены используемые полетные контроллеры.Рисунок 2.2 – Полетные контроллеры APM 2.6, Pixhawk, AIOP Полетный контроллер выполняет функции:
-
сбор информации с датчиков (встроенных и подключенных); -
установка/расчет по датчикам своего положения в пространстве; -
сбор информации о управляющих внешних воздействиях; -
расчет параметров отклонения системы и отправка корректирующих сигналов на исполнительные механизмы.
Как упоминалось выше полетный контроллер — это в основном плата с датчиками, которая определяет изменения ориентации вашего беспилотного
летательного аппарата. Он также принимает команды пользователя и управляет двигателями, чтобы держать квадрокоптер в воздухе.
Почти все полетные контроллеры имеют базовые датчики, такие как гироскоп и акселерометр. Некоторые контроллеры могут включать более продвинутые датчики, такие как барометр (барометрические датчики давления) и магнитометр (компас). Также контроллер полета имеет возможность
подключаться ко многим периферийным устройствам и датчикам, таким как GPS, дальномеры и т. д.
Помимо разницы в оборудовании, они могут также использовать разные прошивки, которые специализируются в разных задачах (например, гоночный дрон или дрон для аэрофотосъёмки). Современная прошивка полетного контроллера обычно может быть сконфигурирована с помощью программного обеспечения на компьютере, смартфоне или даже с пульта управления.
Для реализации проекта выбор упал на полетный контроллер Pixhawk, так как он сочетает в себе простоту использования, мощную начинку, а также доступом к сообществу с открытым исходным кодом и библиотекам. Pixhawk представляет собой комбинацию PX4 FMU и PX4 IO версии 2 и, в дополнение, предназначен для работы с пакетами прошивки PX4 и Ardupilot.
[8] На рисунке 2.3 показан полетный контроллер Pixhawk 2.4.8, используемый в реализации проекта.

Рисунок 2.3 – Полетный контроллер Pixhawk 2.4.8
- 1 2 3 4 5 6 7 8 9 ... 35
Характеристики центрального процессора (CPU)
Аппаратное обеспечение Pixhawk основано на 32-битном процессоре Cortex M4F с частотой 180 МГц производства ARM Holdings. Чип имеет 256 КБ ОЗУ и 2 Мб флеш-памяти.
Pixhawk имеет интегрированную система резервного копирования для восстановления в полете. [9]
-
Интерфейсы подключения
Плата поддерживает пять универсальных асинхронных приемников/передатчиков (UART), шину промышленной сети (CAN), межсхемную последовательную шину (I2C), последовательную периферийную шину интерфейса (SPI) и 8 аналого-цифровых преобразователей (ADC). I2C поставляется с разделителем I2C, который позволяет пропускать до трех сигналов через один порт. Это позволяет работать с несколькими устройствами, такими как GPS и Airspeed. Только три из восьми каналов АЦП доступны как открытые порты. Два контакта расположены в порту 3.3V, а последний - порт 6.6V. [9]
-
Характеристики гироскопа
Гироскоп представляет собой трехосный датчик MEMS, номер детали L3GD20H. Он имеет связь I2C или SPT, фильтр нижних частот и имеет регулируемую чувствительность. Частота дискретизации установлена на 760 Гц драйверами Pixhawk с чувствительностью 2000 DPS и низкочастотным фильтром 50 Гц. [9]
-
Характеристики акселерометра
Модуль eCompass LSM303D оснащен трехосевым акселерометром и 3D-магнитометром. Линейный ускоритель может измерять до +/- 16g, и для максимальной чувствительности должен быть установлен как +/- 2g.
Магнитометр также имеет минимальный диапазон +/- 2 и максимум +/- 12 Гаусс. Включает