ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.12.2023
Просмотров: 371
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
2.1. Основные цели и задачи прикладного корреляционно-регрессионного анализа
2.2. Постановка задачи регрессии
2.4. Коэффициент корреляции, коэффициент детерминации, корреляционное отношение
3. Классическая линейная модель множественной регрессии
3.2. Оценивание коэффициентов КЛММР
Этап 3. Определим компоненту Т. Для этого проведем аналитическое выравнивание ряда (ТЕ) с помощью линейного тренда. Имеем линейный тренд вида:
T = 13,5229+0,7730t.
Стандартная ошибка коэффициента регрессии 0,735. R2=0,97.
Подставляя в уравнение тренда последовательно t= 1,…,20, получим значения тренда для каждого уровня временного ряда (столбец 5, табл. 5.12).
Этап 4. Найдем значения уровней ряда, полученные по мультипликативной модели как (TS) (столбец 6, табл. 5.12).
Этап 5. Рассчитаем абсолютную ошибку как U=yi-(TS), (столбец 7, табл. 5.12). Качество полученной модели можно проверить, используя сумму квадратов абсолютных ошибок (столбец 8). Общая сумма квадратов абсолютных ошибок равна 21,033. По отношению к сумме квадратов отклонений исходных уровней ряда от его среднего уровня, равной 530,072, эта величина составит 3,9681%:
(21,03378/530,072)100=3,97 %.
Следовательно, мультипликативная модель объясняет 96,03% общей вариации экспорта.
5.6. Модели стационарных и нестационарных временных рядов и их идентификация
Модели авторегрессии порядка p (AutoRegressive - AR(p) models).
Достаточно часто экономические показатели, представленные в виде временного ряда, имеют сложную структуру. Моделирование таких рядов путем построения модели тренда, сезонности и периодической составляющей не приводит к удовлетворительным результатам. Ряд остатков часто имеет статистические закономерности. Наиболее распространенными моделями стационарных рядов являются модели авторегрессии и модели скользящего среднего.
Будем рассматривать класс стационарных временных рядов. Задача состоит в построении модели остатков временного ряда ut и прогнозирования его значений.
Авторегрессионная модель предназначена для описания стационарных временных рядов. Стационарный процесс удовлетворяет уравнению авторегрессии бесконечного порядка с достаточно быстро убывающими коэффициентами. В частности поэтому авторегрессионная модель достаточно высокого порядка может хорошо аппроксимировать почти любой стационарный процесс. В связи с этим модель авторегрессии часто применяется для моделирования остатков в той или иной параметрической модели, например регрессионной модели или модели тренда.
Модель авторегрессии порядка 1AR(1) (марковский процесс).
Марковскими называются процессы, в которых состояние объекта в каждый следующий момент времени определяется только состоянием в настоящий момент и не зависит от того, каким путем объект достиг этого состояния. В терминах корреляционного анализа для временных рядов марковский процесс можно описать следующим образом: существует статистически значимая корреляционная связь исходного ряда с рядом, сдвинутым на один временной интервал, и отсутствует с рядами, сдвинутыми на два, три и т. д. временных интервала. В идеальном случае эти коэффициенты корреляции равны нулю.
Авторегрессионная модель первого порядка определяется соотношением:
u(t)= u(t-1)+(t) , (5.1)
где - числовой коэффициент <1, (t) – последовательность случайных величин, образующих «белый шум» (E(
(t))=0, E((t)(t+))=
 ).
). Модель (5.1) называется также марковским процессом.
Имеем:
E(u(t))0. (5.2)
r(u(t)u(t))=. (5.3)
Du(t)=2/(1-2). (5.4)
cov(u(t)u(t))=Du(t). (5.5)
Из (5.3) следует, что при близком к единице дисперсия u(t) будет намного больше дисперсии t. Это значит (учитывая (5.2) =r(u(t)u(t1))=r(1), т.е. параметр может быть интерпретирован как значение автокорреляции первого порядка), что в случае сильной корреляции соседних значений ряда u(t) ряд слабых возмущений t будет порождать размашистые колебания остатков u(t).
Условие стационарности ряда (5.1) определяется требованием <1.
Автокорреляционная функция (АКФ) r() марковского процесса определяется соотношением (5.3).
Частная автокорреляционная функция
rчаст()=r(u(t)u(t+)) u(t+1)=u(t+2)=…=u(t+-1)=0
может быть вычислена по формуле: rчаст(2)=(r(2)-r2(1))/(1-r2(1)). Для второго и выше порядков (см. [1], с. 413, 414) должно быть rчаст()=0 =2,3,… . Это удобно использовать для подбора модели (5.1): если вычисленные по оцененным невязкам u(t)=yt-
Идентификация модели. Требуется статистически оценить параметры и 2 модели (5.1) по имеющимся значениям исходного ряда yt.
Выделяем неслучайную составляющую
=0). Далее с учетом (5.2), (5.3) получим формулы для оценки параметров модели (5.1):
 ,
,Модели авторегрессии р порядка – AR(p) при p2 см. в [1], с. 834-837:
u(t)=1u(t-1)+2u(t-2)+…+(t). (5.6)
Пример. График первой разности ряда, хорошо описывающейся моделью AR(1), представлен на рис. 5.1; график выборочной автокорреляционной функции (АКФ) первой разности этого ряда представлен на рис. 5.2.
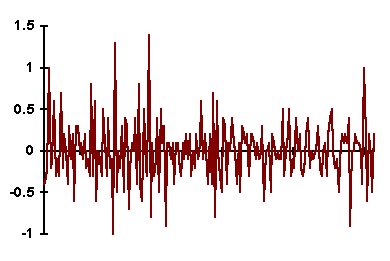 | 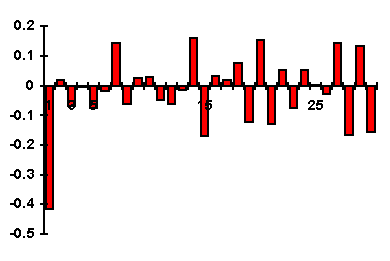 |
Рис. 5.1 | Рис. 5.2 |
Модели скользящего среднего порядка q (MovingAverage - MA(q) models).
Часто на показатель в текущий момент времени оказывает воздействие значение показателя в предыдущие моменты. Хотя воздействие отдаленных элементов незначительно, в сумме оно может оказывать существенное влияние на модель. Учесть это воздействие возможно в модели скользящего среднего. Моделирование воздействия всех предшествующих элементов ряда на показатель в текущий момент основано на предпосылке о том, что в ошибках модели за несколько предшествующих периодов сосредоточена информация о всей предыстории ряда.
Моделью скользящего среднего порядка q называется процесс:
u(t)=(t)-1(t-1)-2(t-2)-…-q(t-q). (5.7)
В частности, модели порядка 1 и 2 соответственно имеют вид:
u(t)=(t)-(t-1), (5.8)
u(t)=(t)-1(t-1)-2(t-2). (5.9)
Переход от формы (5.6) к форме (5.7) осуществляется с помощью последовательной подстановки в правую часть формулы (5.6) вместо u(t-1), u(t-2), … их выражений, вычисленных по формуле (5.6) для моментов времени t-1, t-2, …. Это означает двойственность в представлении анализируемого временного ряда – две эквивалентные формы линейного процесса - и обратимость AR и MA моделей.
В качестве примера рассмотрим модель скользящего среднего первого порядка – МА(1). Данная модель описывается соотношением (5.8). Можно показать, что стационарность u(t) обеспечивается при любом значении параметра . Модель обратима (представима в виде модели авторегрессии бесконечного порядка) при условии <1.
Автокорреляционная функция:
Частная корреляционная функция процесса МА(1), определяющая степень тесноты корреляционной связи между u(t) и u(t), =1,2, … при фиксированных значениях всех промежуточных элементов этого ряда задается выражением:
Идентификация модели МА(1). Требуется статистически оценить параметры и 2 модели (5.8) по имеющимся значениям исходного ряда yt. Выделяем неслучайную составляющую